一款新型翻转式垃圾桶的设计
2020-05-08刘维维张耀娟李彭辉周海洋
刘维维,张耀娟,李彭辉,周海洋
(北华大学 机械工程学院,吉林 吉林 132021)
在最近十年中,中国经济持续且快速地发展,而快速发展所带来的生活垃圾已对城镇居民的生活环境造成了巨大的破坏.对于这种现状,政府已采取很多措施来进行改善,环境保护已成为中国发展的基本国策,越来越多的人加入到环境保护的队伍中,而城市垃圾桶作为城市环卫基础设施的一道靓丽风景线,它的样式和洁净程度充分体现了这座城市的管理水平和文明程度[1].现如今,国外很多国家已经出现了垃圾分类机器人,可以将各种不同的贵重材料从不同种类的垃圾中分离出来并回收,而不是直接掩埋造成贵重资源的浪费;目前国内也已经有很多种类型的垃圾分类机申请了专利,大部分垃圾分类机是以生活垃圾的体积大小、轻重、软硬为根据,通过机械结构来进行分类,还有一些是对全自动智能垃圾分类机的研究[2-4].而传统意义上的垃圾桶是通过环卫工人打开垃圾桶顶盖人工取出垃圾,再将垃圾倒入垃圾处理车内,这种方式不仅极大的浪费体力而且效率不高,而且现在大部分的垃圾桶不注重电池等一系列会污染土壤和水源的垃圾的回收,所以电池等垃圾的回收也迫在眉睫[5-10].通过对目前市场上已有垃圾桶的结构和功能进行了深入地研究与分析,对现有结构进行改进,设计了一款新型翻转式垃圾桶,该垃圾桶可以在较小作用力以及较短的时间内将垃圾桶翻转到指定高度,方便快捷,使环卫工人在清洁垃圾时既省时又省力又能改善其工作环境.改良后的垃圾桶能够方便清理,且进行系统的垃圾分类,集电池回收、公益广告牌、高效省力于一体.
1 新型翻转式垃圾桶设计
1.1 新型翻转式垃圾桶组成
设备主要由可回收部分、不可收部分以及电池回收部分组成,通过摇动两侧的手柄以及垃圾桶本身翻转时的重力做功来提供动力.结构方案如图1所示.
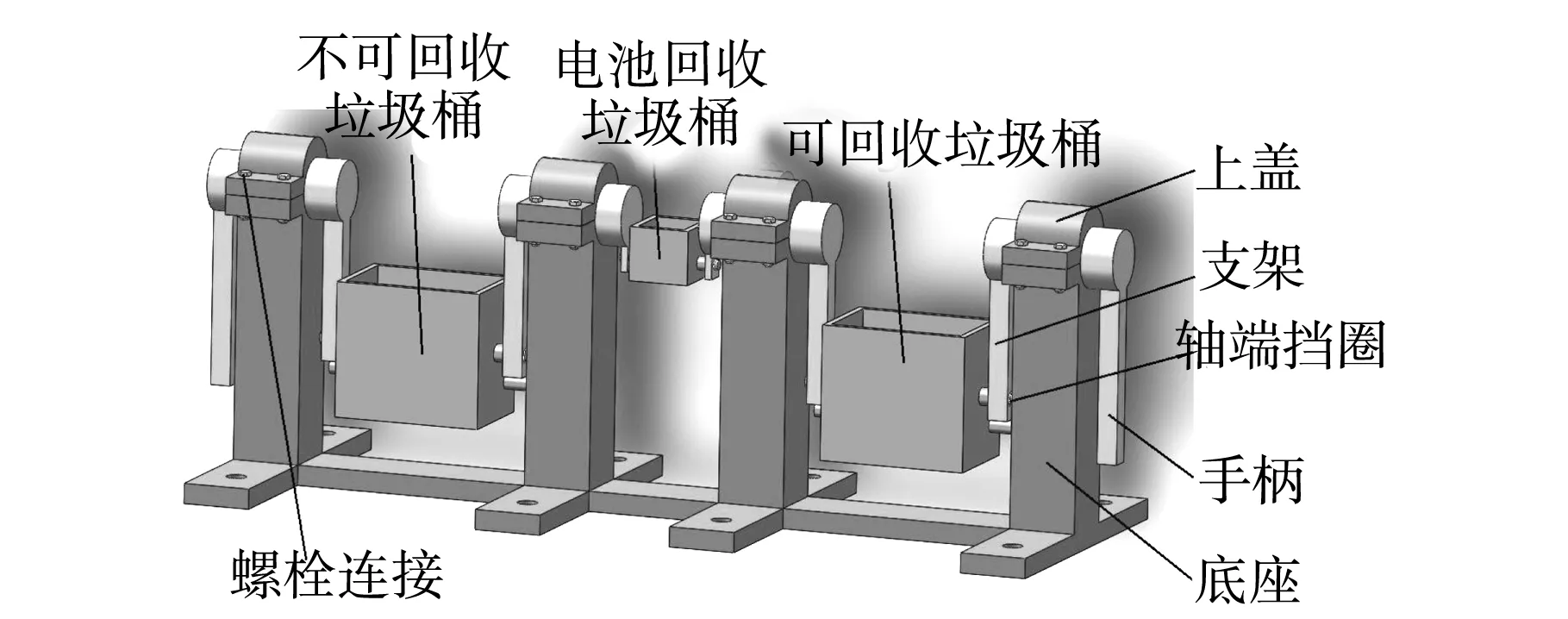
图1 新型翻转式垃圾桶结构
1.2 新型翻转式垃圾桶工作原理
如图2所示,以可回收垃圾桶为例,将手柄9与支架2作为同一构件,为了便于安装,将垃圾桶的底座设计为剖分式的底座与上盖,并通过普通螺栓组进行连接,底座可采用地脚螺栓与大地连接.手柄的转轴与底座之间采用间隙配合,以减少摩擦损耗.另外,手柄长度长于支架长度,以达到省力的目的,手柄的形状可以根据具体的需要进行设计.将支架设计为L型,当支架随着手柄转过一定角度后与垃圾桶侧面的限位销接触进而带动垃圾桶一起转动,以实现将垃圾桶内的垃圾倒入环卫车这一过程.为了提高对垃圾桶的支撑强度,在垃圾桶两侧各采用一个L型支架进行支撑,同时采用双支点各单向定位的定位方式对垃圾桶进行定位,由于垃圾桶工作过程中受到的轴向力不大,所以两侧采用轴端挡圈对垃圾桶进行轴向定位.垃圾桶与L型支架之间同样采用间隙配合以减少摩擦损耗.
将不可回收垃圾桶置于设备的另一侧,其结构组成与工作原理与可回收垃圾桶相同.将可回收垃圾桶与不可回收垃圾桶置于设备的两侧可以单独对两类垃圾桶进行控制.将电池回收垃圾桶置于设备的中间,由于体积较小,可以直接转动垃圾桶进行倾倒.此外,根据具体需要可在垃圾桶周围设置广告牌、挡雨牌等设施.
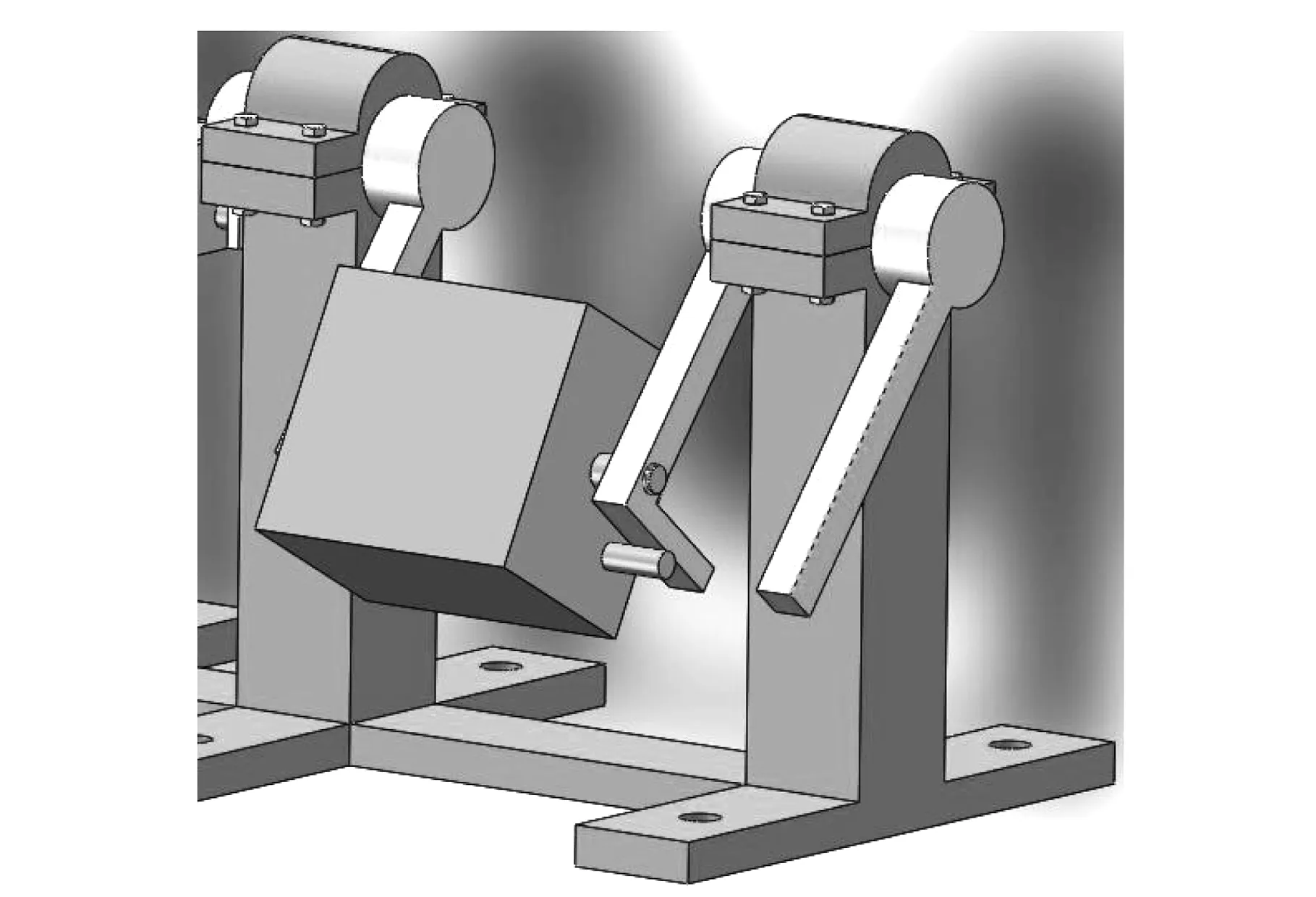
图2 可回收垃圾桶结构示意图
2 关键零件动态应力分析
所设计的翻转式垃圾桶其主要零件有垃圾桶、L型支架以及手柄.对于垃圾桶来说,其两端由L型支架进行支撑,不工作时只受垃圾桶自身的重力作用,所以只产生弯曲应力.在工作过程中,还受到由手柄传递到L型支架进而作用在垃圾桶上的扭矩作用,此时的应力状态则为弯扭组合.对于L型支架和手柄来说其工作过程中主要产生弯曲应力.
为分析上述零部件在运动过程中的动态应力,验证翻转式垃圾桶的工作性能,在多体动力学分析软件ADAMS中导入所设计的翻转式垃圾桶三维模型,添加相应的运动副与接触力,各零件间相对关系如表1所示.将上述3种零件进行柔性化处理,建立翻转式垃圾桶刚柔耦合模型,网格划分如图3所示.设置此垃圾桶的容积为100 L,最大装载质量为120 kg,关键零件材料为316 L不锈钢,其屈服强度为170 MPa,人施加在手柄上的力为200 N.通过仿真分析发现,当手柄上施加200 N的力时,仅需要0.2 s就可以将垃圾桶翻转到指定位置,说明所设计的翻转式垃圾桶具有较高的效率.提取翻转式垃圾桶工作过程中某一时刻的应力云图,如图4~6所示.可以看出,对于垃圾桶而言其转轴的主动端应力小于从动端应力,说明从动端转轴是垃圾桶的薄弱位置,在设计时可以考虑适当增大从动端转轴的直径,以提高其强度.从图6可以看出,相同尺寸下手柄强度最大,主动支架次之,从动支架最小,所以可以考虑适当减小手柄的尺寸,使之趋于等强度.提取翻转式垃圾桶工作过程中上述3种关键零件应力最大点的动态应力曲线,如图7所示,当垃圾桶处于不同位置时,由于其重心发生变化,各零件的应力也随之发生变化.当t=0.14 s时各零件应力达到最大,是因为此时支架与垃圾桶的限位销刚好相撞,产生较大的冲击力,进而产生较大的应力,但各零件的最大应力分别为147.51、119.37、75.21 kPa,均小于材料的屈服强度170 MPa,说明所设计的结构能够满足强度要求.

表1 各零件间相对关系
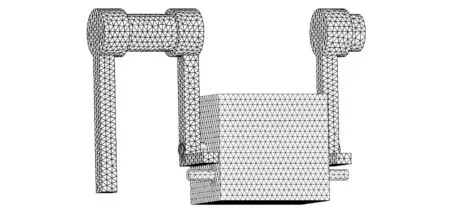
图3 支架、箱体、手柄网格划分
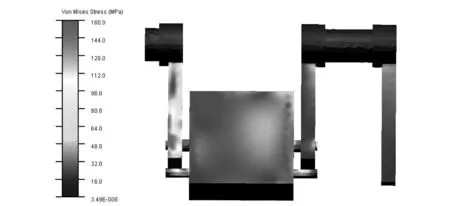
图4 支架、箱体、手柄应力云图
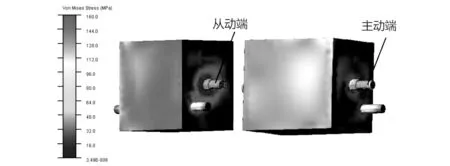
图5 垃圾桶应力云图
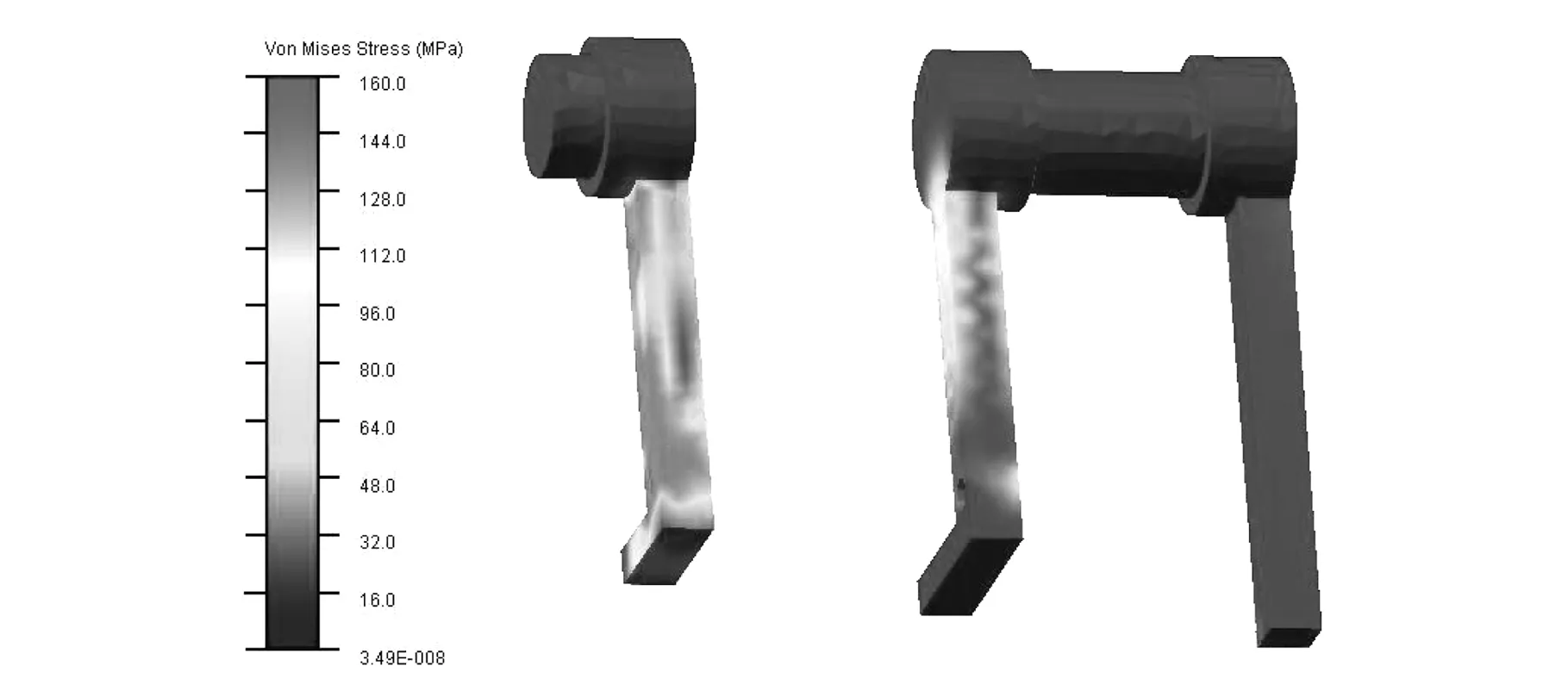
图6 手柄与支架应力云图

t/s图7 箱体、手柄动态应力曲线
3 结 论
设计并研制了一款多功能翻转式垃圾桶,该垃圾桶能够自动将垃圾倒入垃圾车且在清理垃圾时清洁工与垃圾桶零接触,桶内垃圾容易倒出.设有可回收部分、不可回收部分以及电池回收部分.可实现多功能垃圾回收,仅在手柄上施加200 N的作用力时,只需要2 s就可以将垃圾桶翻转到指定高度,方便快捷,使环卫工人在清洁垃圾时既省时省力又能改善其工作环境.通过建立翻转式垃圾桶刚柔耦合模型,得到垃圾桶从动端应力大于主动端应力,从动端支架应力大于主动端以及手柄应力,其动态应力最大值分别147.51、119.37、75.21 kPa,均小于材料的屈服强度170 MPa,说明所设计的结构能够满足强度要求,为相关设计提供依据.
