太阳能无人机高效螺旋桨气动设计
2020-05-06李星辉李权张健
李星辉,李权,张健
(航空工业第一飞机设计研究院 总体气动设计研究所,西安 710089)
0 引 言
太阳能飞机依靠自身携带的太阳能电池供能,不似常规飞机受到能源的限制,在理论上能够实现“永久飞行”;而无人机较之常规飞行器,可适应环境范围更广,维护成本更低,因此,太阳能无人机在执行通信、监视、侦察等任务,尤其是长时间任务时优势明显,具有广阔的军、民用应用前景,受到越来越多的关注。目前,国外已经研发出多款太阳能无人机,例如“西风”“太阳神”等,国内也在加紧研制,目前尚处于起步阶段。
太阳能无人机未来的发展方向是“超高空、超长航时(无限接近于永久飞行)”。无人机主要在平流层(距离地面11~50 km)内活动,该区域几乎没有雷雨等气象,太阳能辐射强烈,大气基本只有水平方向的运动而无上下运动[1-2],是太阳能无人飞机的理想飞行环境。但是该区域空气密度很低,若采用常规螺旋桨,则推力小、效率低。另一方面,受限于太阳能电池的转化效率,超长航时飞行对螺旋桨的推进效率也有极高要求。地面至20 km高空之间,空气密度随高度变化明显,这些气动参数均会对螺旋桨的气动特性产生直接影响。为了降低能耗,充分利用电机功率,必须研制能适应大跨度飞行且在低密度平流层高效推进的螺旋桨,这就要求螺旋桨具有轻质、高效、适用范围广的特点,这也是太阳能无人机的一个设计难点[3-5],给传统意义上的螺旋桨设计提出了新的挑战。
低雷诺数螺旋桨气动特性的评估方法主要有理论分析、CFD数值模拟和试验。CFD数值模拟计算量大、耗时较长,试验成本高、周期长[6],因此理论分析方法更适用于螺旋桨的设计阶段。理论分析方法中最常用的是片条理论和叶素理论[7]。刘沛清等[8-9]利用雷诺数相似等原则开展螺旋桨的缩比风洞试验研究,结果表明片条理论与试验结果吻合度较高;王豪杰等[10]也利用片条理论开展了螺旋桨气动设计;国外研究人员也在螺旋桨气动特性评估工作中验证了片条理论和叶素理论的可行性[11-13];焦俊等[14]通过车载试验获取了螺旋桨的气动性能,验证了叶素理论在螺旋桨设计阶段也适用。上述研究多针对典型状态设计点进行高空螺旋桨的气动设计,没有考虑螺旋桨使用的全包线。
对于太阳能无人机而言,能源利用是其设计方案重点,螺旋桨须在全包线范围内尽量保持高效率工作。本文结合某太阳能无人机的总体设计要求,兼顾飞机高空巡航环境和低空爬升性能,完成螺旋桨的高效气动设计;同时采用遗传算法对翼型进行优化设计,并利用叶素理论评估螺旋桨的气动性能。
1 算法说明
在螺旋桨设计阶段,常用的螺旋桨性能计算方法主要有动量理论、螺旋桨叶素理论、螺旋桨片条理论、螺旋桨数值模拟四种方法[7]。其中螺旋桨叶素理论准确性较高,计算量较小,能够满足螺旋桨设计阶段的需求,应用非常广泛。
叶素理论将桨叶分为有限个微小段(称之为叶素),然后计算每个叶素上的气动力,最后沿径向求和得到桨叶上的总气动力。
叶素理论未计入桨叶产生的下洗效应和桨叶之间的干扰,但是对于低速低雷诺数下展弦比较大的两叶桨而言,该理论缺陷的影响很小。
叶素受力图如图1所示,取螺旋桨径向r处的微段dr,相应叶素弦长为b。

(a) 叶素剖面

(b) 叶素剖面速度图图1 叶素受力图Fig.1 Force on blade element
在飞行中,叶素的前飞速度为V0,切向旋转速度为2πnsr,ns为单位时间内螺旋桨的转速,单位是r/s,由此可得叶素的几何合成速度:
(1)
旋转平面之间的夹角为
(2)
令叶素的安装角为θ,则气流相对叶素的迎角α=θ-φ0,利于翼型的气动力系数定义,作用于叶素上的升力和阻力分别为
(3)
(4)
叶素的升阻角为
(5)
叶素的拉力为
(6)
叶素的转矩为
(7)
设螺旋桨的总叶数为NB,桨毂半径为r0,则积分可得螺旋桨的拉力为
(8)
其中,
(9)
转矩为
(10)
其中,
(11)
吸收功率为
Pw=2πnsM
(12)
有效功率为
Pe=TV0
(13)
效率为
η=Pe/Pw
(14)
2 螺旋桨设计要求
某无人机以太阳能为动力,实现跨昼夜的20 km高空飞行。根据该无人机的总体方案,飞机从地面起飞至20 km高空,然后在20 km高空进行昼间巡航,并在太阳能不足的夜间降低至12 km高空进行夜间巡航,待太阳能充足的白昼再次升往20 km高空巡航,如此反复。
根据无人机的动力需求,螺旋桨的气动设计指标如下:
(1) 昼间巡航高度20 km,效率不低于83%;
(2) 夜间巡航高度12 km,效率不低于85%;
(3) 爬升下滑段效率不低于75%;
(4) 螺旋桨需尽量外形简单易加工,具有良好的非设计点气动性能,失速和缓。
3 螺旋桨气动设计
3.1 叶素设计
叶素是指螺旋桨垂直于展向的截面,也称为翼型。叶素的形状和尺寸对螺旋桨的工作性能产生直接的影响,是螺旋桨的设计重点之一。无人机飞行速度非常低,20 km高空处空气又非常稀薄,螺旋桨桨叶的绕流雷诺数为10万量级,接近翼型的临界雷诺数。对于超低雷诺数翼型,小迎角时就可能出现层流分离泡,导致阻力系数迅速增加,升力系数下降,甚至失速提前,气动特性严重恶化。对于超长航时太阳能无人机,一般采用定桨矩螺旋桨,在飞行包线内,螺旋桨的桨叶角固定,通过调整桨转速满足不同状态的动力需求。因此,该翼型设计除满足高效巡航要求外,还需兼顾飞机起降、爬升等工况需求。
根据螺旋桨设计要求,采用低雷诺数高升力翼型[15],确保飞行包线内螺旋桨具有较高的效率。20世纪80年代,在模型飞机和人力飞机等低速飞行器设计中研究过低雷诺数高升力翼型,发展的优秀翼型包括Eppler387、S1223和FX63-137等。该类翼型在工作条件下具有层流特征,通过层流流动,减小摩擦阻力,提高气动效率。
对于层流翼型,存在一个低阻戽斗区,在该区间内,阻力系数随升力系数变化非常小;离开该区间,阻力系数随升力系数变化将急剧增大。层流翼型的工作升力系数一般位于该区间内。为了提高螺旋桨的效率和使用范围,所用叶素的低阻戽斗区需尽量宽,各工作升力系数位于低阻戽斗区内,这样在较宽的升力系数范围内,叶素阻力系数就足够小。经过分析,设计工况选取为20 km高空,优化低阻戽斗区边界和阻力系数。
设计工况:
CASE 1:Ma=0.3,Re=1.7×105,CL=1.0
CASE 2:Ma=0.3,Re=1.7×105,CL=0.1
设计目标:各工况阻力最小。
设计约束:(1) 翼型相对厚度10%;(2) 几何曲率连续;(3) 失速特性和缓。
采用多点多目标优化设计方法完成翼型设计,优化算法采用多目标遗传算法,流程如图2所示。参考翼型选择典型的低雷诺数高升力Eppler387翼型(以下简称E387)。
气动力求解采用XFOIL软件,该软件采用高阶面元法,进行有粘或无粘迭代计算翼型气动力,具有较高的分析效率。XFOIL采用基于线性稳定性理论的eN 方法进行转捩判定,N因子取9。
通过与参考翼型几何特征比较的间接方法来实现失速特性约束,即约束新翼型的前缘半径和前缘钝度不小于参考翼型。
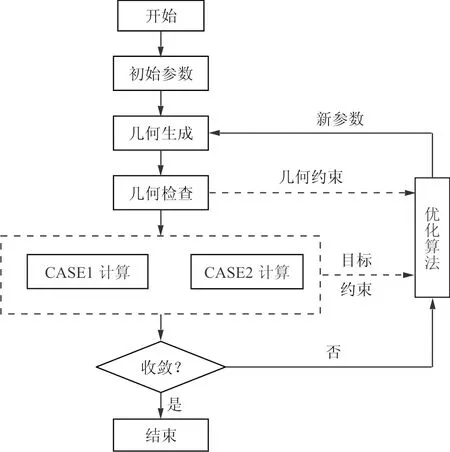
图2 翼型优化设计流程示意图Fig.2 Flow chart of airfoil design
优化翼型(opt)与E387翼型的几何对比如图3所示,可以看出:优化翼型的弯度小于E387翼型,但通过后缘的后加载设计弥补了损失的升力。

图3 优化后的翼型和E387的外形对比Fig.3 Shape comparison between optimized airfoil and E387
优化翼型与E387翼型的气动力对比如图4~图5所示。

图4 优化后的翼型和E387的升力对比Fig.4 Lift comparison of optimized airfoil and E387

图5 优化后的翼型和E387的极曲线对比Fig.5 Polar comparison of optimized airfoil and E387
从图4~图5可以看出:优化翼型具有更高的最大升力系数,更宽的低阻戽斗区,在较宽的升力系数范围内,升阻特性优于E387翼型。
3.2 三维优化
为了提高螺旋桨效率且尽量减轻结构复杂度和重量,设计为直径4 m的两叶定距螺旋桨。
桨叶截面翼型的弦线长度称为桨叶宽度b。为了更好地发挥气动性能,桨叶宽度一般是沿径向变化的。翼根部分由于当地雷诺数低,一般选择厚度较大的翼型,且弦长较小,既保证低雷诺数下不易失速,也利于螺旋桨的结构强度。而桨尖的弦长也较小,能够减弱桨尖的三维效应,利于提高气动效率。因此,螺旋桨的弦长分布基本呈现“柳叶型”,即两头小中间大的趋势。弦长的分布,以保证0.5R~0.8R段的气动效率为主要目标,并尽可能减小螺旋桨的轴距,也利于提高螺旋桨效率。本文螺旋桨的弦长分布,保证在高效气动效率段,当地雷诺数尽量相同,且在20 km高度巡航时,当地雷诺数大于桨叶翼型的临界雷诺数。螺旋桨的桨叶平面外形如图6所示。按照此弦长分布,在20 km高空巡航时,螺旋桨的0.7R处雷诺数约为1.0×105,高于翼型的临界雷诺数。

图6 螺旋桨桨叶平面形状Fig.6 Propeller blade plane shape
在桨叶的任何半径处,剖面翼型弦线与螺旋桨旋转平面之间的夹角,称为桨叶剖面的安装角,也称为桨距。本文螺旋桨为定距桨,即指桨距不可变化。为了达到良好的气动效率,需要合理分布桨距以保证在不同半径的剖面翼型都处于有利的工作迎角,从而使翼型的升阻比较高。根据对翼型气动特性的分析,可以得到翼型的最佳工作迎角。但是本文螺旋桨的主要工作点有两个,即昼夜巡航点,因此需要对两个状态点统筹规划,同时也要兼顾升空阶段螺旋桨能够提供足够的拉力及效率。最后获得的螺旋桨桨距分布如图7所示。

图7 螺旋桨桨叶角分布Fig.7 Blade pitch distribution
3.3 性能分析
螺旋桨外形确定以后,根据无人机总体技术方案的要求,对螺旋桨在昼夜两个巡航设计点和爬升阶段进行气动性能评估。气动评估使用基于叶素理论的Jblade软件[17]。
昼夜巡航阶段的螺旋桨气动特性如表1和图8~图10所示,可以看出:螺旋桨的昼间巡航效率达到0.85,夜间巡航效率达到0.89,并且螺旋桨在一定转速范围效率均较高。

表1 巡航状态的气动力

图8 螺旋桨的拉力系数随前进比变化曲线Fig.8 Propeller thrust coefficient force curve

图9 螺旋吸收功率系数随前进比变化曲线Fig.9 Propeller power coefficient curve

图10 螺旋桨效率随前进比变化曲线Fig.10 Propeller efficiency curve
两个巡航状态下螺旋桨沿径向的当地迎角分布如图11所示,可以看出:在设计点上,剖面翼型的当地迎角大部分处于小迎角范围,在此范围内翼型升阻比较大,气动性能良好。

图11 螺旋桨沿径向当地迎角分布Fig.11 Blade local angle of attack distribution
爬升阶段的螺旋桨气动特性如表2所示,可以看出:螺旋桨在最大功率条件下爬升,效率均达到0.8以上,满足设计需求。

表2 爬升状态的气动力
4 结 论
(1) 低雷诺数高升力翼型的设计优化,是获得高效螺旋桨的关键点之一,本文采用多目标遗传算法获得的翼型气动性能优良,最终螺旋桨的巡航气动效率达到0.89。
(2) 合理的桨距分布对于定距桨的气动设计尤为重要,使设计点的当地叶素处于高升力使用迎角范围,是获得高气动效率的关键。
