森林防火机器人的研究现状与发展趋势
2020-04-28韩亚辉刘佳鑫王喜龙
韩亚辉, 王 琢,2*, 刘佳鑫,2, 王喜龙
(1.东北林业大学机电工程学院,黑龙江 哈尔滨 150040;2.东北林业大学林业人工智能研究院,黑龙江 哈尔滨 150040)
森林被誉为“地球之肺”,承担着通过光合作用为地球产生氧气及净化空气的重任,同时在水土保持、防止自然灾害等方面具有重要作用。此外,森林也是巨大的资源库,除了能够提供多种林木产品外,森林中的各种食品及其加工品也是重要的生活资源。森林也为一些珍稀保护动物提供了天然的栖息地以及食物,为保持生物多样性做出巨大贡献。
根据国家历次的森林资源清查显示,自第一次森林面积统计以来,除1977-1981年间以外,我国森林面积稳步增长。自1973年以来我国的森林蓄积量、森林覆盖率均呈现稳步增长趋势,如图1所示。据国家第九次森林资源清查数据,我国的森林面积已达22 044.62万hm2,森林蓄积量达到1 756 000万m3,林业用地面积达到32 368.55万hm2,森林覆盖率达22.96%。伴随如此巨大森林储量而来的是时刻都可能发生森林火灾,据国家森林草原防灭火指挥部办公室统计,2018年全国共发生森林火灾2 478起,其中特大火灾2起,重大森林火灾3起,较大森林火灾894起,一般森林火灾1 579起,受害面积达16 309 hm2,造成39人伤亡[1]。2019年四川凉山森林火灾造成27名消防人员和3名地方干部死亡。森林火灾的发生时刻威胁着人类的生命以及宝贵的自然资源,党中央和国务院对森林火灾十分重视。2016年国家林业局根据《森林防火条例》制定了《全国森林防火条例(2016-2025)》,提出了今后森林防火发展的总体思路、发展目标、建设重点和长效机制建设,用于指导全国森林防火工作[2]。

图1 全国相关年份森林面积统计图
1 林火发生的原因及危害
1.1 林火发生的原因
森林火灾的火源归纳起来有天然火源和人为火源两大类。天然火源主要是火山爆发、陨石降落、泥炭自燃、雷击火等,人为火源主要包括烧荒、烧灰积肥等生产性火源和野外吸烟、上坟烧纸等非生产性火源[3]。
天然火源中雷击火是最常见的火源,雷击火主要受自然条件影响。若某地区降雨较少且气候干旱则非常容易形成雷电,雷电通过林木时,由于林木的导电性能较差,林木会迅速升温,此时林木内部的水分迅速蒸发,林木可能从中间裂开甚至爆炸起火。雷击火在我国的大兴安岭地区尤为突出,大兴安岭是全国雷击火发生次数最多、最集中的地区[4]。黑龙江省位于我国东北部,冬季寒冷干燥,春秋多风,湿度低,因此黑龙江省的林区是雷击火发生次数最多和受灾损失最为严重的地区之一[5]。内蒙古地区的大兴安岭林区属于中高纬度地带,气候干旱,由于受到蒙古国以及贝加尔湖冷空气的影响容易形成雷暴天气,从而易产生雷击火引起火灾[6]。雷击火灾虽然难以控制、难以监测,但在我国其发生率极低,每年维持在1%左右。
我国绝大多数的森林火灾均是由人为因素引起。人为火源主要是指由于人类的生活、生产活动等直接或间接引发的森林火灾。人为火源又可以分为生产性火源、非生产性火源和其他火源[7]。我国人为火源的发生率每年均在95%以上,人为火源严重威胁着我国的森林安全。生产性火源主要包括烧荒烧灰、烧隔离带、采石放炮等,非生产性火源主要有野外炊烟、上坟烧纸、林区吸烟等。1987年的大兴安岭森林火灾因工作人员在清理林木过程中违规使用机械且在林中抽烟引起,此次火灾造成了巨大损失。2018年4月重庆市垫江县由于村民上坟烧纸不慎引燃杂草,随即引发森林大火。此次森林大火共造成过火面积2 325亩,损失林木23 250株。2019年5月,山东临沂因村民上坟烧纸造成森林火灾。其他火源包括犯罪性火源、国外火灾入侵等。
1.2 林火的危害
森林火灾中首当其冲受到伤害的就是林木。森林火灾会使当地的森林蓄积量急速下滑,若森林烧毁严重,破坏了森林生态系统结构,则有可能使森林成为灌木丛甚至荒地。
森林除了可以提供林木外,还蕴藏着丰富的天然绿色食品。森林中的黑木耳、中药材、菌类食品为人类提供了丰富的食材,森林火灾会改变森林中植物的生长环境,甚至可能使某些植物种类灭绝。
森林还是众多野生动物的栖息地。森林火灾会破坏野生动物生存坏境,严重的甚至烧死或者灭绝野生动物,从而破坏食物链,影响森林生态系统。
森林土壤是森林水文效应的最后一个层次,也是水分转化和转移的重要介质[9]。森林中的树叶减缓了雨水对地表的冲击力,森林庞大的根系对土壤起了固定作用。火灾过后,森林水土保持的效力大大下降,甚至消失。
森林火灾造成大面积的空气污染,使大气充满烟雾、草木灰等,降低了大气透明度[10],而且使土壤物理性质变劣,森林火灾会烧坏土壤的有机物质,破坏土壤结构[11]。
2 森林防火的原则及对策
2.1 森林防火的基本原则
在森林防火过程中,为了保证正确有效地应对不同地域、不同类型的森林火灾,应遵循以下原则:一是“打早”,即发现火灾,尽快灭火;二是“打小”,即在火灾初期尽快控制火情;三是“打灭”,即完全扑灭火灾[12]。
2.2 森林防火的对策
(1)强化火源管理。森林防火中要坚持“预防为主,积极消灭”的基本方针[13]。规范林区用火条例,严格检查进入林区的人员以及设备,防止非必要火源进入林区。在林区的边缘地带烧荒、烧垦等,也要采取相应的防火措施。
(2)强化林区防火组织建设。森林防火是一项群众性、社会性的细致工作,是林区所有人员的一项大事,因此建立健全防火组织建设很有必要[14]。落实林区防火责任,将防火任务层层分解,逐级落实,责任到人。
(3)加强林区防火宣传。在林区群众较多的地方开展防火宣传,走村入户普及法律知识,树立法律意识[15]。加强推行公众参与制度,调动群众积极性,尤其是基层防火管理机构应定期举行群众灭火演练[16]。
(4)加强林区的信息化和智能化建设水平。林区管理的信息化,涵盖林区监管系统的全部内容,是林业信息化的基础,也是林业信息化的核心和重点[17]。加快林业信息化的建设进程,可以大大促进林业的发展[18]。以信息化手段为核心,通过固定视频、无人机巡航等远程监控对森林进行有效的监测管理[19]。为了建设林区的智能化防火,要加强林区工作人员的信息化培养,促进林区工作人员综合素质的提高[20]。
3 防火机器人的研究现状
随着科学技术的发展和人类对森林火灾认识的不断深入,防火方法和防火装备研究日趋活跃。许多国家对防火装备的研制给予高度重视,并已研制出了一些有效的防火机器人。机器人是一种由计算机控制的机电一体化设备,模仿人的各种动作且可以代替人完成复杂、困难且危险的工作。人工智能是关于知识的学科,其本质就是对人的思维进行模仿[21]。人工智能机器人是将人工智能技术与传统的机器人相结合。
3.1 国外研究现状
美国和日本是世界上最先开始研究并进入防火机器人应用的国家,经过多年的发展两国的防火机器人已经进入智能化控制时代。智能化灭火机器人可以对火灾现场进行预处理,极大地提高了灭火效率,降低了人员伤亡。
美国弗吉尼亚理工学院为美国海军设计的消防机器人CHARLI-2跳骑马舞的视频短短数小时就吸引了几十万的点击量。如图2所示,CHARLI-2的身高约为1.5 m,主要用于军舰灭火。它不仅能够穿越狭窄的过道,还能模仿人类的动作。它还可以使用消防软管、投掷灭火手雷、爬梯子,在甲板上行走时可以保持平衡。
2019年日本首个消防机器人系统已经部署到千叶县市原市的消防局,接收仪式上消防机器人系统展示了从现场监视到排水的一系列操作。据悉,该系统由以下四种机器人项目组成:空中监视和监控机器人“天眼”,地面机器人“陆眼”,软管部署机器人“延伸软管”和“水炮”机器人[22]。此外,土耳其Adnan Menderes University的研究人员设计了一款早期火灾侦测机器人平台,如图3所示,该机器人通过虚拟指定路径和火灾探测单元扫描周围环境以探测火源[23]。Lund University和European Organization for Nuclear Research的研究人员通过VR技术模拟火灾现场,在安全通道中使用机器人为被困者指路,结果表明,不同灯光的组合机器人系统可为被困者提供快捷安全的逃生通道[24]。

图2 CHARLI-2消防机器人

图3 火灾侦测平台机器人
3.2 国内研究现状
1995年,我国成功开发BFC804型履带式森林消防车。2004年,哈尔滨拖拉机厂开发出LY1102 XFSG30型履带式消防车。从2009年开始东北林业大学的研究团队基于动力底盘的思路分别就机载式大功率风力灭火机、履带手扶步进式风力灭火机和履带遥控双风机等风力灭火机进行设计研究[25-26],履带式灭火机如图4所示。2016年黑龙江森保所研发了一种便携式风力灭火机自动检测平台,可以快速对风机关键参数进行测量,为风力灭火机性能试验研究提供便利[27]。海南大学陈伟哲、黄梦醒等研制的消防辅助机器人,使用HSV颜色识别算法进行目标识别,提高系统语音识别的智能程度,向智能交互发展[28]。中北大学的苗春壮利用OpenCV计算机视觉库,使用AdaBoost机器学习算法训练出检测火焰和伤员的级联分类器,开发了消防机器人火场智能识别系统。该系统能将远程相机回传的图像进行实时识别,并标记目标,在一定程度上提升了救援效率[29]。如图5所示,南京林业大学的徐振亚等提出了一种六自由度单手臂机器人,在森林消防中进行除障及清理[30]。中国与加拿大合作研究的基于学习的无人机烟雾探测技术采用模糊逻辑检测规则以及图像处理技术发现火灾烟雾,在不同的环境下验证证明了该研究的有效性[31]。兰州交通大学柳云龙等针对现有的消防机器人误报率高等缺陷,设计了LabVIEW和数据融合的防火机器人控制系统。该系统采用BP神经网络算法和数据融合技术进行火灾预测,提高了火灾报警的准确率[32]。防火机器人如图6所示。
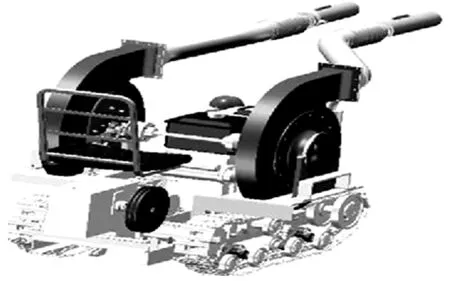
图4 履带式灭火机
图5 六自由度单手臂机器人
图6 防火机器人
4 防火机器人的发展趋势
综上所述,森林防火机器人经历了从早期的简单机械与控制相结合到如今向智能化方向发展,并已经有了跨越式的进展。但目前森林防火机器人仍存在许多不足和问题,如智能化水平不高、制造流程繁琐、空地协同能力不足等。针对以上问题,本文提出了森林防火机器人的发展趋势。
4.1 防火机器人功能智能化
智能防火机器人是人工智能、神经网络、自动控制、计算机科学等学科的交叉产物,随着各个学科理论及实践的创新,消防机器人必然向更加智能的方向发展,主要包括行走智能化、环境识别智能化以及工作装置的智能化[33]。环境识别智能化是指通过不同种类的相机组合,对周围环境进行识别,例如数码相机和红外相机,数码相机提供普通数字图像,红外相机可以提供热源图像。使用图像融合技术将两种图片中的环境信息融合,从而为机器人提供更加详细的地理环境。行走机构的智能化是指越障能力更强,更方便,可以通过增加机器人在行走过程中与地面的接触面积,进而增加机器人的稳定性,使机器人可以平稳地通过沟壑、台阶、斜坡、涵洞等障碍。工作装置的智能化主要是指消防系统云台等设备的智能化。
4.2 防火机器人制造智能化
随着计算机技术以及我国经济体量的壮大,我国制造业也快速发展,特别是在“中国制造2025”的大背景下,制造业的地位尤为重要。智能制造技术利用计算机模拟人类的大脑思考,通过逻辑分析对工业生产中的所有过程进行控制和决策。机器人智能技术是将传统机器人制造技术与智能制造技术结合起来,智能制造技术可以大大提高信息传递的准确性,提升生产效率。
4.3 防火机器人的空地协同
空地协同发挥了无人机和地面防火机器人各自的优点,弥补了二者的不足。地面防火机器人的视野先天不足,对周围的环境没有宏观的掌握,空中机器人凭借其先天的视野优势弥补了地面机器人的缺点。而空中机器人负载较轻,工作时间短,而这正是地面机器人的长处。空中无人机通过机器视觉技术发现着火点并且实时追踪地面机器人,跟随地面机器人协同飞行并为地面机器人提供详细的火源地区信息。
5 结论
近几年来,森林消防机器人研究快速发展,特别是在人工智能的研究背景下,智能防火机器人的研究如火如荼,但我们要认识到消防机器人研究中依然存在各种各样的问题。随着国家对生态文明重视程度的不断加深,森林作为生态系统中的重要组成其地位必然随之上升,因此森林防火机器人的研究也越发重要,森林防火机器人的不断发展必将为我国林业的智能化发展提供源源不断的动力。