交会对接光学成像敏感器中合作目标的分析与设计*
2020-04-28王世新华宝成李明政赵春晖
王世新,华宝成, 袁 琦, 张 良, 李明政, 赵春晖
0 引 言
空间交会对接技术作为卫星在轨服务,空间物资补给及空间站建设领域的一项关键技术,一直被世界各国所重视,前苏联于1967年实现了人类历史上首次太空自动交会对接,随后包括美国、日本、法国等在内的世界各国也进行了多次自主交会对接的试验任务规划及实施.我国于2011年由神舟八号与天宫一号进行了第一次交会对接[1],2016年9月开始,中国又陆续完成了神舟十一号、天舟一号与天宫二号空间实验室的一系列交会对接任务,为中国空间站的建设奠定了良好基础.在载人飞船、货运飞船先后与天宫二号完成的多次交会对接任务中,交会对接光学成像敏感器 (camera-type rendezvous &docking sensor, CRDS)作为瞄准载人三期和探月三期自动交会对接任务而研制的新一代空间交会对接光学成像敏感器,在上述任务中发挥了重要作用,达到预期目标[2].
相较于在神舟八号、九号和十号载人飞船与天宫一号的交会对接任务中CCD光学成像敏感器采用的主动发光合作目标,CRDS中采用的被动合作目标具有抗杂光能力强、可靠性高、零功耗、易于实现小型化和轻量化的显著特点[1].
1 工作原理
角锥棱镜的光学特性为:从底面入射进棱镜的光线,经3个直角面全内反射后,其出射光线反向平行于入射光线;入射光线和反射光线以棱镜顶点呈中心对称分布;对于任何平行光线,其在棱镜内所走的光程为一定值,因此角锥棱镜已广泛的应用于激光测距、激光通信等技术领域[3-4].
交会对接光学成像敏感器通过相机对合作目标成像,并根据已知的合作目标构型解算出相机与合作目标的相对位置和姿态,是两飞行器交会对接近距离平移靠拢段唯一能够提供六自由度相对导航数据的敏感器.考虑到CRDS工作距离,配置了近、远场两组合作目标,以满足视场范围、测量精度等指标,无论近场还是远场合作目标,均由角反射器构成.
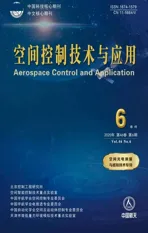
其工作原理示意图如图1所示.相机端环形光源照明合作目标,合作目标上的角反射器将光线原路返回,进入相机成像,数据处理单元将图像中目标光点坐标和已知的合作目标构型作为输入,解算出合作目标与相机之间的相对位置和姿态.
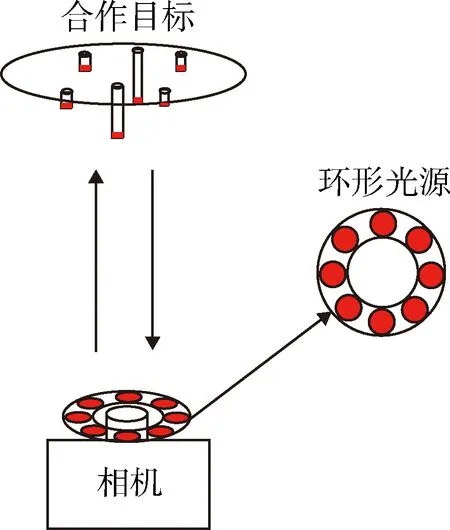
图1 成像式敏感器系统示意图Fig.1 Schematic diagram of camera-type sensor system
2 需求分析
合作目标的设计需考虑以下几个因素.
(1)目标口径和间距
最远工作距离处,相邻目标光点图像不应融合,目标光点间应保持一定距离;最近工作距离处,所有目标均应可靠地保持在相机视场内.同时目标口径应尽可能大,以返回更多的光通量,提高信噪比,进而提高测量精度,但同时应保证远距离目标不致融合[5].
(2)构型布局
目标的空间布局应保证在要求对接走廊内所有的状态下能够呈现清晰的目标图像.其中一个目标必须和其他目标不在同一平面内,利用该偏移量进而得到相对俯仰和偏航信息,且测量精度与偏移量呈正相关.同时应考虑到目标的空间布局和其他结构机构间的约束和干涉.
(3)回光能量一致性
无论是应用软件中的阈值计算模块和目标提取模块,都要求同一组目标内的各个目标能够均匀地回光,回光能量一致性较好,以保证测量精度.为满足这一要求,应保证同一组目标内目标间回光能量差异性不大于10%.
(4)前表面光学窗口的透过率
前表面光学窗口透过率应足够高,不应过多反射回光,一方面保证角锥棱镜的回光能量足够强,尤其在远距离情况下光束发散导致光强变弱;另一方面降低“自扰”及“互扰”出现的几率.
(5)长寿命要求
作为交会对接被动端,CRDS的合作目标安装在目标飞行器,需较早进入空间飞行,将随着目标飞行器在太空连续工作长达数年甚至数十年,因此除需要具备抗空间热、力学能力外,还需要满足空间原子氧、紫外、总剂量、低能电子等环境需求.
3 合作目标设计
3.1 角锥棱镜成像光路分析
从角锥棱镜底面入射的任意光线,都要经过入射时底面折射、三个直角面的依次反射以及出射时底面折射,如图2所示.

图2 角锥棱镜光路图Fig.2 The incidence beam of the prism
分析角锥棱镜的物像关系,可将每次折射或反射等效为一次成像.光线入射底面发生折射的成像光路示意图如图3(a)所示.点光源A照射到角锥棱镜底面的光线与棱镜轴线(方向同底面法线)夹角α与折射角β满足折射定律
sinα=nsinβ
(1)

图3 角锥棱镜的物像关系分解示意图Fig.3 Schematic diagrams of objective-image relationships of the prism
其中n为角锥棱镜材料折射率.点光源A入射时折射成像像点记为A1,A距离角锥棱镜底面的高度记为h0,A1距棱镜底面的高度记为h1,有
h0tanα=h1tanβ
(2)
从底面入射到角锥棱镜内的光线经3个直角面反射成像.在图3(b)所示的坐标系下,设A1点坐标为(x,y,z),则其关于XOZ面成像像点坐标应为(x,-y,z).最终经3个直角面成像的像点记为A2,其坐标应为(-x,-y,-z),即物点A1与像点A2关于角锥顶点O对称.则A2距棱镜底面的高度为
h2=-(h1+2d)
(3)
其中d为棱镜深度,如图3(c)所示,负号表示A2与A1在角锥底面的两侧.
由3个直角面反射后的光线(可等效为像点A2发出的光)从底面射出,并再次发生折射,原理与入射时相同,记折射像点为B,则点光源A关于角锥棱镜成像的最终像点位置为B.点B距角锥棱镜底面的高度为h3,有
h3tanα=h2tanβ
(4)
点光源A和最终像点B之间的关系如图3(c) 所示,二者关于角锥棱镜轴线OO’上某点M对称.点M与O’点间距离为
h=(h0+h3)/2
(5)
综合式(1)~(5),可得点M与O’间距离为
h=dtanβ/tanα
(6)
即点M与O’点间距离与点光源A照射到角锥棱镜底面的光线与棱镜轴线夹角α、棱镜深度d以及棱镜材料折射率n有关.
3.2 角锥棱镜有效反光区域
对于有效反射区域为圆形的角椎棱镜,当入射光垂直其底面入射时,回光孔径为与角锥棱镜口径相同的圆;当光线斜入射时,入射孔径中心和出射孔径中心会发生偏移,导致有效反光面积减小.在CRDS中可认为是点光源照射角锥棱镜,点光源A照射到角锥棱镜底面的光线与棱镜轴线夹角为α,可由上述成像光路分析确定点光源A关于角锥棱镜的像点位置,即点光源A关于点M的对称点B位置.由角锥棱镜回光特性可知,任一从底面入射光线其出射光线与入射光线平行.考虑边界情况,点光源A发出的光线入射到角锥棱镜边缘点R,其对应的出射光线必过点B且与入射光线平行,与角锥底面交于出射点T.入射点R沿角锥棱镜边缘移动,则出射点T也相应移动,二者画出的曲线是两个相交的圆,直径与角锥棱镜口径相同,其中重叠部分就是角锥棱镜的有效反光区域[6-7].可以计算两圆的圆心距,如图4所示.
两圆的圆心距为
L=2dtanβ
(7)
其中,α与β满足式(1).
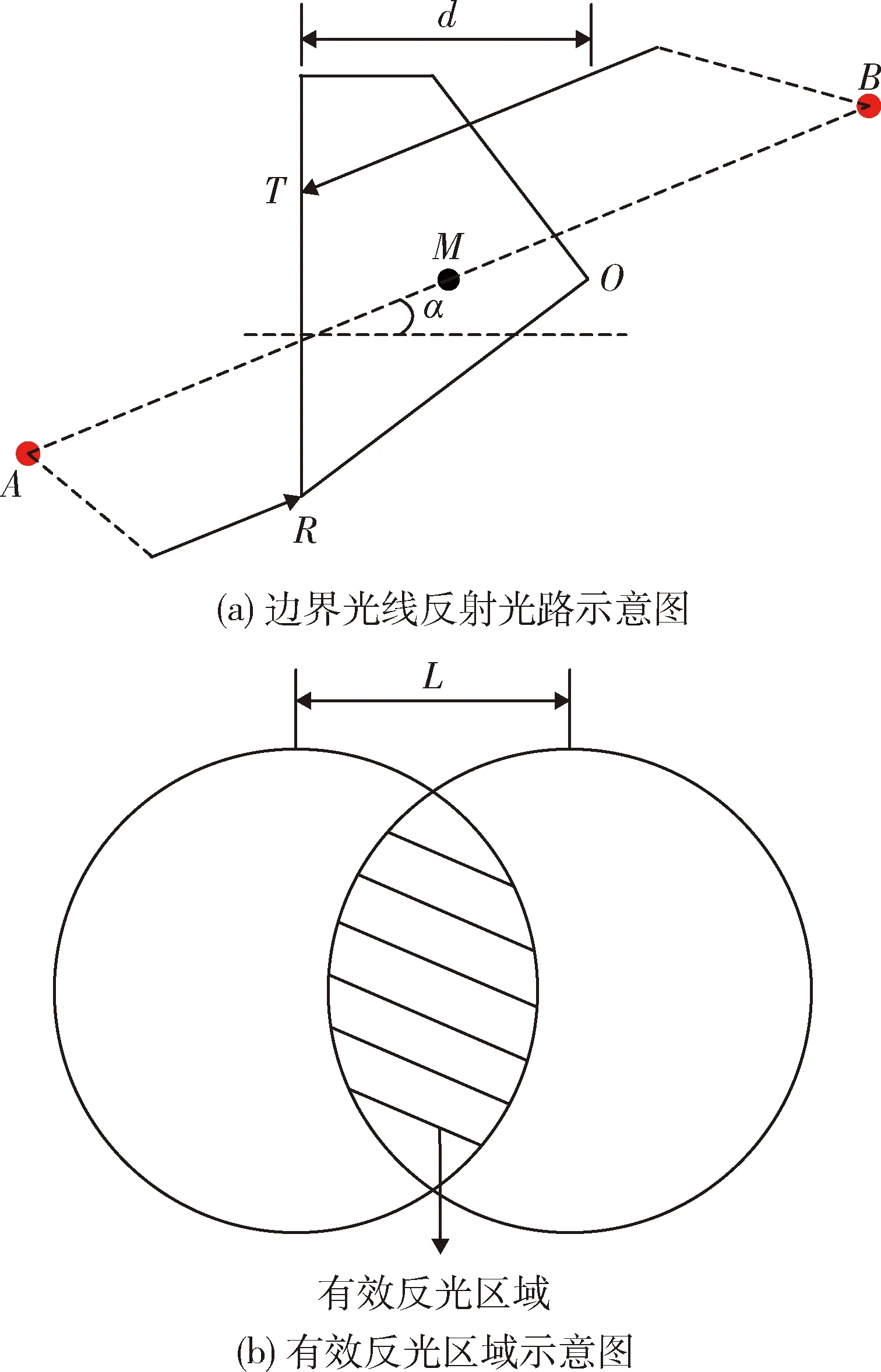
图4 角锥棱镜有效反光区域分析Fig.4 Analysis of effective reflection area of the prism
3.3 角反射器口径设计
入瞳是相机能量收集窗口,描述了能够进入光学系统而且能够从出瞳输出的所有光线的限制光阑.因角反射器回光的特殊性,在光学镜头的视场边缘,容易出现角反射器回光无法进入入瞳的情况.因此,角反射器回光能否覆盖入瞳是角反射口径设计中的重要约束.
环形光源发出的光被合作目标各角反射器接收按原方向返回(称后向反射,下同)后,光束进入到相机入瞳完成成像,有以下几种情况:
1)当角反射器位于相机视场中央范围时,后向反射光束与光轴平行,后向反射光束能够充满相机入瞳,因此能够良好成像;
2)当角反射器不在相机视场中央范围时,角反射器的后向反射光束将与光轴成一定夹角,当该夹角较小时部分光束能够进入相机入瞳,可以成像;
3)随着该夹角变大,进入相机入瞳的光线越来越少,像斑逐渐变暗,直至无法成像.
角反射器回光与入瞳关系主要受3个方面因素影响,如图5所示.
1)光学系统入瞳尺寸D等参数
2)入瞳与出光口间的距离l
3)角反射器有效发光面积L
图5 角反射器回光与入瞳关系示意图Fig.5 Relationships between return light of the corner reflector and entrance pupil of the optical system
则综合上述3方面因素影响,并考虑极端工况,角反射器口径至少为
Φ=l′+D/2+L
进一步有
Φ=ltanα+D/2+2dtanβ
(8)
综合式(1)和(8),并将实际设计值代入可得角反射器最小口径为Φ=21.88 mm.
考虑到角反射器实际误差,以及视场、作用距离和测量误差等,最终确定近场角反射器的口径为25 mm,远场角反射器的口径为35 mm.
3.4 角反射器构型设计
对于近场目标,初始设计为图6所示的5点构型,针对该目标构型,统计得到其在近距离工况下实际姿态测量结果误差,同时对其进行仿真分析,在像点坐标中添加同等幅度的噪声,结果统计如图7所示,仿真结果与精度测试结果一致.
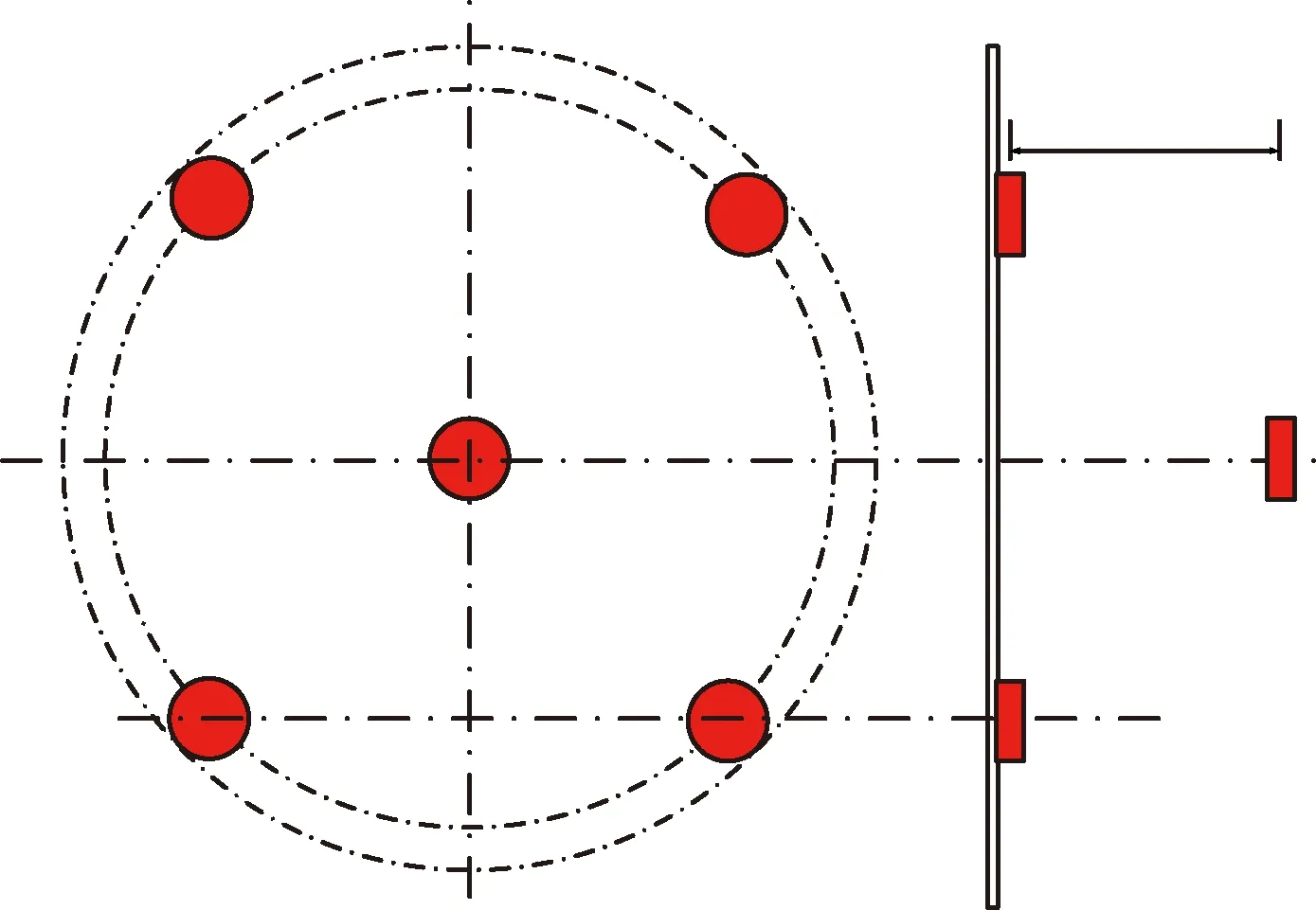
图6 初始近场合作目标构型Fig.6 Initial configuration of near cooperative target clusters
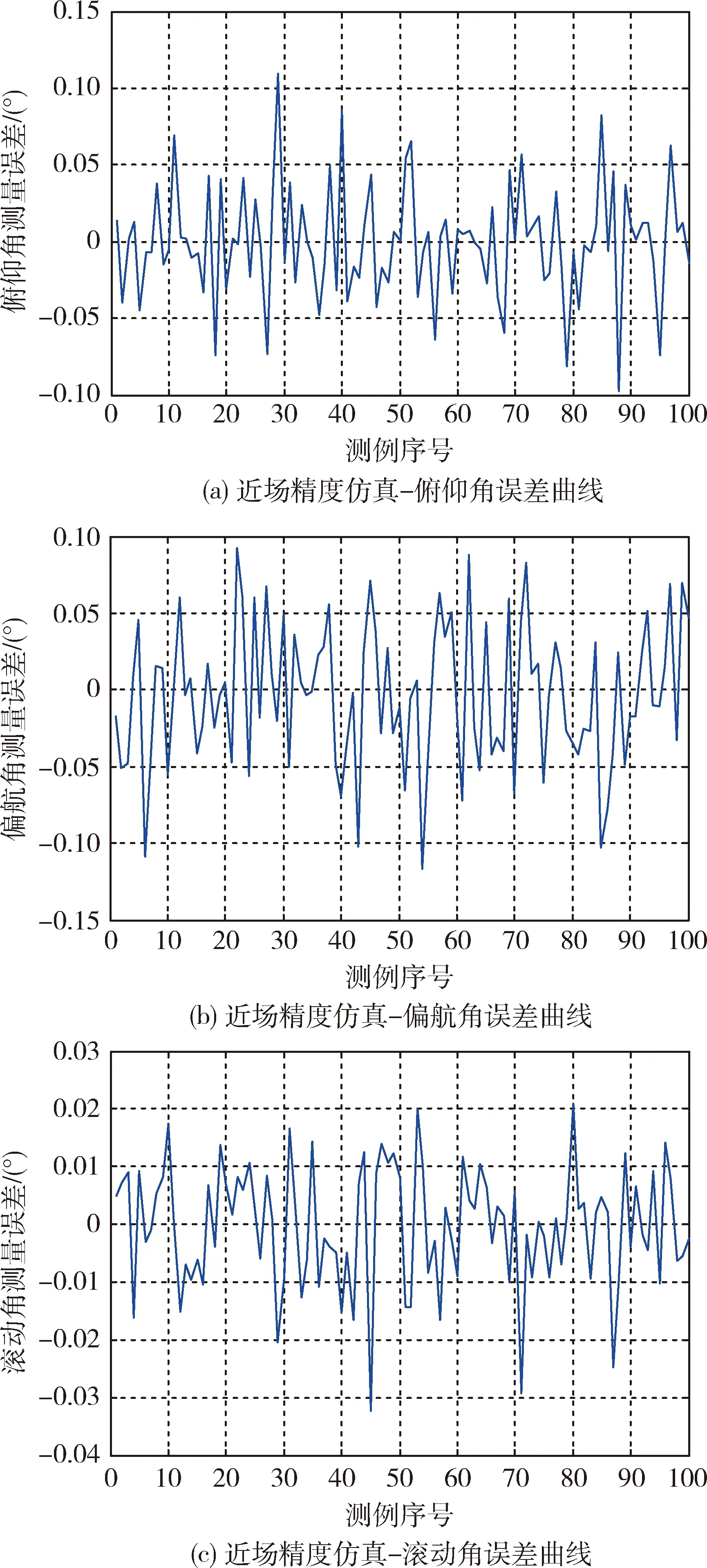
图7 初始近场目标参数仿真结果Fig.7 Simulation results of the initial configuration of near cooperative target clusters
考虑中央凸起点高度增加一倍,在同样噪声水平下进行仿真,得到姿态误差曲线如图8所示.
从仿真结果来看,中央凸起高度提高1倍后俯仰、偏航姿态误差方差减小约一半.在增高凸起点基础上,拟将近场目标增加为6点构型[8-9],如图10.在同样噪声水平下进行仿真,得到姿态误差曲线如图9所示,相对5点构型,姿态误差减小了约1/5.
在基线相同条件下,凸起点高度提高1倍,俯仰、偏航姿态精度提高约1倍;六点构型相对五点构型误差减小约1/5.因此确定近场目标选择增高的6点构型方案.
同理,远场目标也采用6点构型,空间布局和近场类似,不再赘述,其空间构型图如图10所示.
4 回光能量测试
为保证测量精度,目标的回光能量必须满足一定的要求,且相互间的差异性不能过大.针对于此,开发了一套角反射器回光特性测试设备用于角反射器回光效率测试以及回光一致性比对.其原理示意图如图11所示.
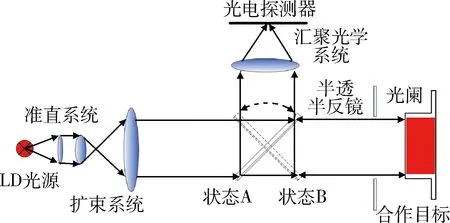
图11 角反射器回光特性测试设备原理图Fig.11 Schematic diagram of the test setup used to measure the uniformity of return
LED光源发出的光束依次经准直系统、扩束系统到达半透半反镜,经过分束后,在半透半反镜处于状态A时,50%的光通量反射后经汇聚系统进入光电探测器,得到参考光束的能量,切换半透半反镜至状态B,此时半透半反射镜透射的50%的光束经过合作目标反射后经汇聚系统进入光电探测器,从而得到合作目标的回光能量[10].
若探测器接收的参考光束能量为WA(θ),接收合作目标的能量为WB(θ),则角反射器回光效率为
其中ξ1为修正系数,θ为角度.
不同角反射器在同一角度下的回光一致性定义为
其中ξ2为修正系数,θ为角度.
对于近场合作目标、远场合作目标的回光效率及一致性要求如表1所示.

表1 近/远场合作目标回光效率及一致性要求Tab.1 Reflectance requirements of the targets
本文选取已在轨应用的某批次角反射器的实际测试结果如表2和表3所示,其中数值均为百分比.
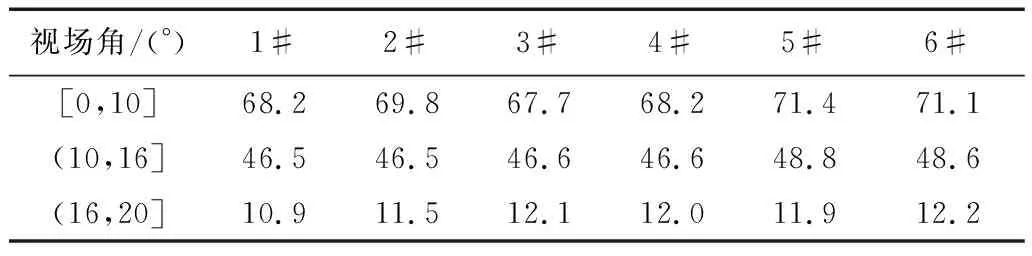
表2 近场合作目标回光效率测试结果Tab.2 Reflectance testing result of near targets
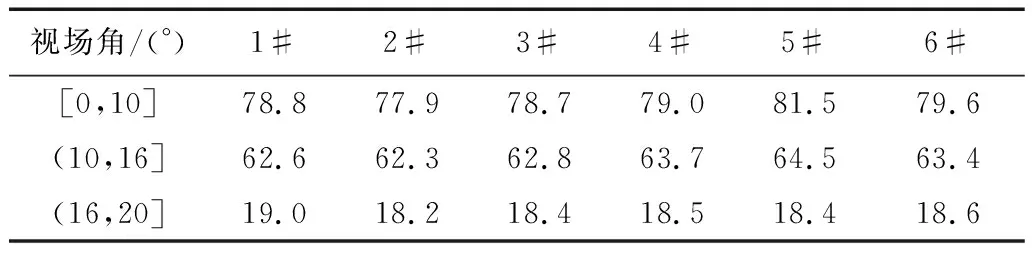
表3 远场合作目标回光效率测试结果Tab.3 Reflectance testing result of far targets
5 结 论
CRDS是中国载人三期和探月三期交会对接任务中的关键单机,对于其合作目标的分析与设计进行了详细阐述.充分考虑任务需求的基础上,对于其中角锥棱镜的成像光路、有效反射区域进行了分析,进一步对角反射器口径及其构型进行了设计,对于其中重要的特性参数进行了测试和一致性比对.产品已经在中国的神舟十一号载人飞船及天舟一号货运飞船与天宫二号空间实验室的交会对接中成功验证,在轨表现良好.后续,将根据在轨应用情况,针对后续的空间站、光学舱等重点型号做进一步优化设计,以满足其更高的要求.