一种在光纤通信中的偏振稳定系统设计与实现*
2020-04-25王思尧张阳安袁学光黄永清
王思尧,张阳安,袁学光,黄永清
(北京邮电大学 信息光子学与光通信研究院,北京 100876)
0 引 言
新型数据业务的不断出现,给传统通信网络带来巨大挑战,光纤通信正朝着大容量、高速率、长距离的方向飞速发展,原本忽略的偏振态相关问题随之凸显。一方面偏振复用技术可将通信容量提高一倍,而光纤链路中偏振态发生随机变化产生RSOP 效应,故需对信号进行偏振稳定控制[1]。另一方面,偏振效应引起的偏振模色散会展宽光信号脉冲,已成为限制高速光纤通信长距传输的主要因素[2]。因此,偏振稳定技术的研究尤为重要。
目前,偏振稳定控制技术主要有保偏光纤、偏振分集和偏振态检测控制等。保偏光纤成本高,损耗较大,不宜用于长距通信。偏振分集技术虽对相干接收机中的极化失配和相位噪声问题十分有效,但由于光链路的增多导致接收机结构复杂,成本高[3]。普通的偏振态检测控制技术由于受到高速电路及数据处理能力的限制,导致其相应速度慢,仅可用于偏振态变化缓慢、平稳的场合。综上,需要研制一种高响应速度、高灵敏度的偏振稳定装置,将光信号偏振态在光纤通信接收端保持稳定。
1 偏振稳定系统设计
本文对普通的偏振态直接检测系统进行改进,提出了如图1所示的基于偏振跟踪的直接检测方案。它无需高速电路支持,可在光纤通信系统接收端实现偏振稳定。
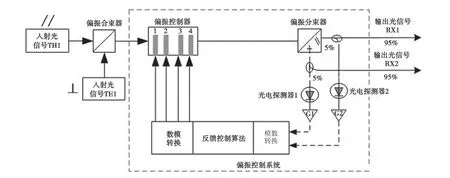
图1 偏振稳定系统
系统由偏振控制器(Polarization Controler,PC)、偏振分束器(Polarization Beam Splitter,PBS)、光电探测器(Photo Diode,PD)、模数转换器(Analog to Digital Convertor,ADC)、数据处理单元以及数模转换器(Digital to Analog Convertor,DAC)等构成。实现偏振稳定的过程如下:入射光进入偏振控制器偏振态被改变,使用偏振分束器将信号分解成两束偏振态正交的光,并耦合成4 路输出,其中2 路光作为偏振稳定系统输出光,另外2 路作为反馈信号进入PD,并进行放大及模数转换,以两路数字电压的形式进入数据处理单元。此单元计算两路电压差作为反馈变量,根据此值推算出当前偏振态状态,通过反馈控制算法计算此时为保证偏振稳定应加至PC 的电压值,将此电压值转化至模拟量后施加PC以改变光路偏振态形成反馈回路,最终实现输出光信号偏振态的稳定控制。
下面理论分析该方案的可行性。
完全偏振光的斯托克斯矢量表示为:

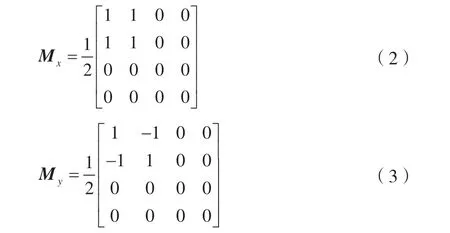
其中,P 为光功率,ε 为椭圆率,θ 为方位角。PBS 将信号分解为两路偏振态相互正交的光,以两路传输轴为x、y 方向建立参考坐标系,其弥勒矩阵表示为:
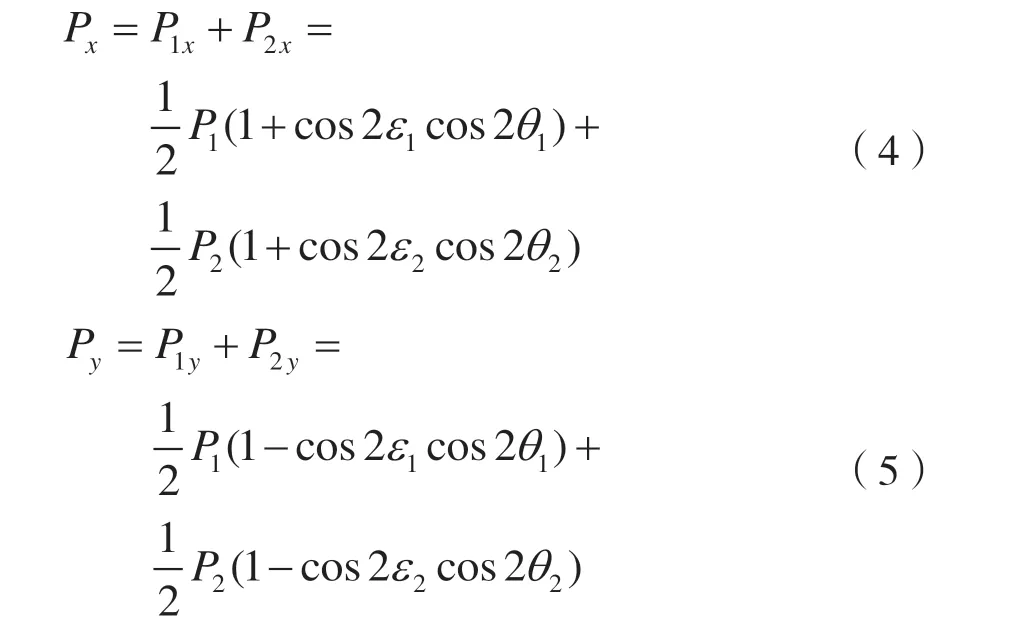
由于TH1、TH2两路光信号偏振态正交,其椭圆率、方位角间有如下关系:
则式(4)和式(5)可化简为:
由于PD 输出电信号与输入光功率成正比,放大电路也为线性放大,故可将PD 及升压电路当做放大系数为α 的整体,则输出电压差为:

由公式知,ΔV 包含偏振态所有信息——方位角与椭圆率,且当ΔV 保持最大时,θ=0°,ε=0°或θ=±90°,ε=±90°,即实现了输出信号的偏振态稳定。综上,只要通过反馈控制算法将反馈信号ΔV 稳定在最大值,即可实现偏振态的稳定控制。
2 反馈控制算法
反馈控制算法采用禁忌-粒子群算法,针对粒子群算法权重固定的问题引入自适应权重[4],并对其陷入局部最优值问题融入禁忌算法的禁忌思想[5],通过禁忌表的设立,形成收敛速度快、不易陷入局部最优值的禁忌-粒子群算法,流程如下。
(1)初始化,设定粒子数、最大迭代次数、粒子维数、禁忌表长度等。
(2)计算各个粒子目标函数,更新粒子个体最优值和全局最优值。
(3)计算惯性权重:
其中,tmax为最大迭代次数,t 为当前的迭代次数。
(4)根据式(12)计算更新粒子速度和位置。
(5)迭代。
(6)判断迭代过程中解是否得到改善,若否,跳转至步骤(7),若是,继续迭代运行。
(7)将得到的全局最优解作为禁忌算法初始值在当前解邻域内进行搜索,选取适应度值较好的候选解生成禁忌表。
(8)比较候选解和当前全局最优解,将较好的解作为全局最优解,更新禁忌表。
(9)判断是否满足终止条件,若满足,输出当前全局最优解。
3 偏振稳定控制实验与结果分析
3.1 实验平台
为进一步验证该研究方案的有效性,搭建如图2 所示的实验平台。

图2 偏振控制实验系统
可将整个偏振稳定控制实验平台分为3 部分。
第1 部分为入射光信号的产生。采用连续波激光器(Continuous Wave,CW)产生光源,用马赫增德尔调制器(Mach Zehnder Modulator,MZM)对光源进行不同格式的调制,且通过为随机二进制序列发生器(Pseudo-Random Binary Sequence,PRBS)调整调制信号速率,从而生成调制格式、调制速率均可调的入射光信号。调制好的光信号进入扰偏器改变其偏振态,进而模拟光纤通信系统中随机变化的偏振态。
第2 部分为偏振稳定系统的硬件实现,可分为偏振控制单元、反馈信号采集单元和数据处理单元3 个部分。偏振控制单元采用EOSPACE 的铌酸锂电控偏振控制器,用于改变光纤链路中的信号偏振态。反馈信号采集单元由PBS、PD 及放大电路构成,此单元产生并采集两路PD 输出电压差ΔV 作为反馈信号。数据处理单元使用STM32F407ZG 作为处理器,TI 的DAC8728 作为数模转换器。此单元对反馈信号进行数据处理并运行反馈控制算法,最终输出加载至偏振控制单元的模拟电压。
第3 部分为偏振分析单元,将偏振控制系统稳定后的光信号通过1:1 耦合器接入偏振分析仪进行偏振态分析,通过邦加球可实时、直观观测当前光纤偏振态的变化情况。
3.2 实验参数
激光器输出波长为1 550.12 nm,扰偏器的干扰速率设为1 krad/s,偏振控制器4 个波片分别设为1/2 波片、1/4 波片、1/2 波片、1/4 波片。
为验证此偏振稳定系统对信号速率、调制格式的敏感度,对信号源分别进行4 种不同的调制,分别为10 Gb/s NRZ-OOK、20 Gb/s NRZ-OOK、10 Gb/s NRZ-PSK 和40 Gb/s NRZ-PSK。
3.3 实验结果与分析
对上述4 种不同调制格式、调制速率的信号光分别进行实验,图3 为偏振分析仪观测到系统输出光信号偏振态变化。
由图3 观测得,对于4 种不同调制格式、调制速率信号光,信号偏振态均由最初的杂乱无章,随着反馈控制算法进行稳定在邦加球(1,0,0)点附近。由于邦加球为偏振态的Stocks 矢量在球坐标系中的直观图像,故信号光偏振态稳定在邦加球上某一点即实现了偏振态稳定控制,由此验证了该偏振稳定系统的有效性,且该技术对光信号调制格式、调制速率透明。
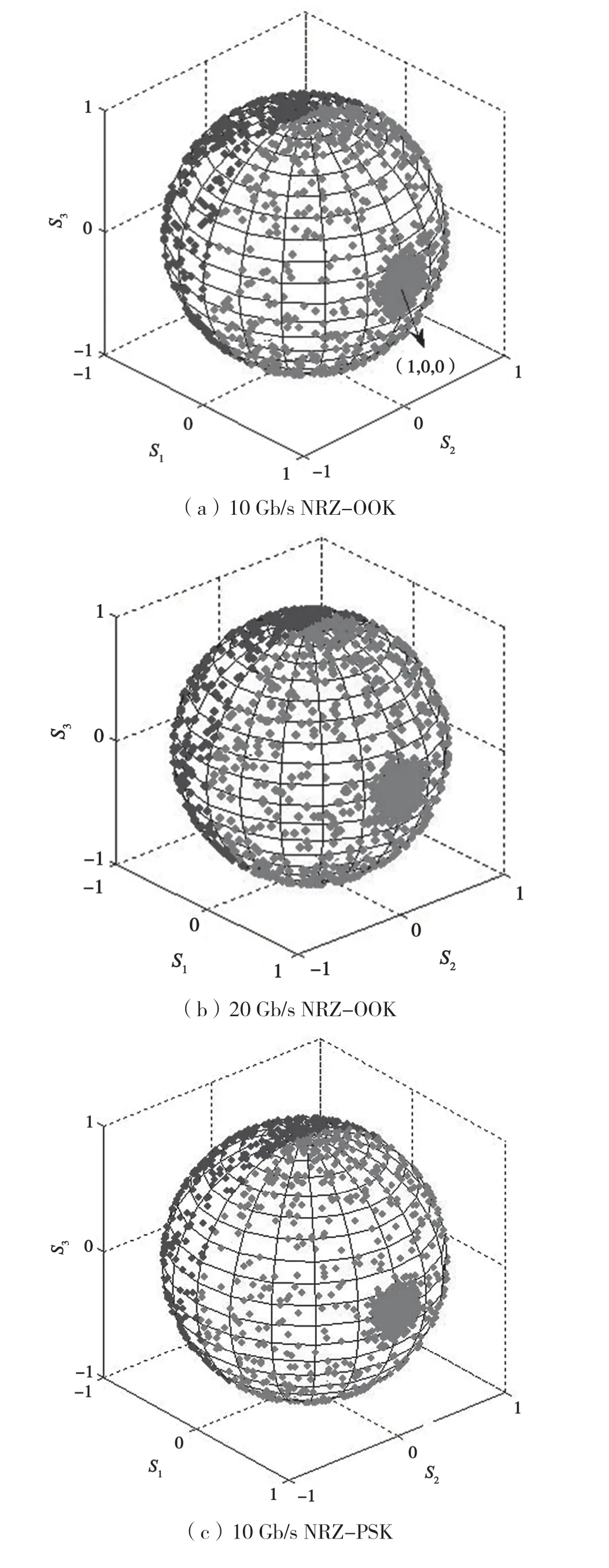
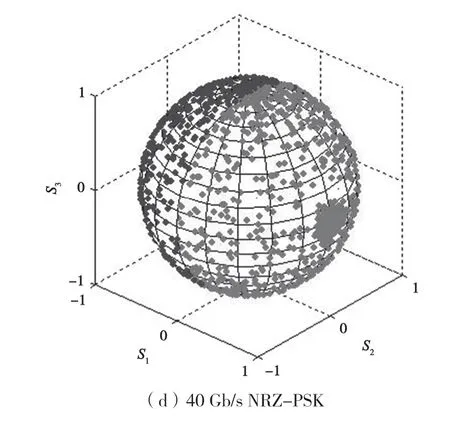
图3 偏振分析仪中光信号偏振态变化情况
4 结 语
本文提出了一种光纤通信系统中对光信号调制格式、调制速率透明的偏振稳定系统,并通过理论分析及实验的方式,验证了该系统的有效性。
