乘用车谱聚类FCAS/PCW风险等级分类算法研究
2020-04-23李畅孙海明宋攀
李畅,孙海明,宋攀
(1.湖北汽车工业学院 机械工程学院,湖北 十堰442002;2.中国汽车技术研究中心有限公司,天津300300)
碰撞避免系统(collision avoidance system,CAS)是一种主动安全技术,可以识别危险驾驶情况,积极帮助驾驶员避免或减轻事故,如自动紧急制动(AEB)、自动紧急转向。为了确定自动干预系统触发的时机,需要一个鲁棒性高的实时风险等级分类算法,算法是CAS 的核心部分。为了使避碰系统及时触发,与驾驶状态相关的紧急情景通常使用基于车辆初始或预测状态的安全指标进行识别[1]。安全指标通常分为基于距离的、基于时间的和基于减速度的指标,是基于车辆匀速、恒定加减速度等假设条件下计算的,实车行驶过程中可能导致风险评估不准确。如碰撞时间不能很好地反映前车突然刹车时的碰撞风险,尤其是在较小的相对距离情况下,而车头时距的性能在两车相对速度较小时受到影响(主车速度较大时)。MacCall等人通过分析驾驶员的制动情况,开发了贝叶斯理论架构,并联合考虑制动需求和驾驶员执行制动的概率,来估计车辆的危险程度[2]。Kluger 等人从离散傅里叶变换纵向加速度时间序列中提取特征变量,并使用K-means 聚类从自然驾驶数据中识别关键事件[3]。一个斜率很大的制动减速度曲线表示处在高风险水平,假设驾驶员做出了紧急制动反应,根据减速度曲线开发的指标用于在线驾驶风险等级分类研究。Lee 等人利用路段加减速累积频率图来测量减速度曲线的风险等级,并利用NGSIM轨迹数据训练神经网络模型来预测潜在的紧急减速,用于碰撞预警[4]。然而减速度曲线的风险水平分类在这些研究中没有实践验证,如通过查看现实驾驶研究中的视频片段来确认是否真的有碰撞危险,即减速度样本没有真正的风险标签,会影响分类结果的有效性。综上所述,安全指标与风险水平关系的量化仍有局限性,需要从实际驾驶数据中得到进一步的探索。文中旨在依据真实的驾驶减速度曲线,通过安全指标和分类规则的优化选择,建立在线驾驶风险等级分类算法。
1 在线风险等级算法的建立
汽车避碰系统的安全指标包括紧急制动下的碰撞时间、车头时距和最终相对距离,由此形成碰撞风险等级。建立在线驾驶风险等级分类算法主要分为2个步骤,如图1所示。首先将离线的减速度曲线聚类成2个风险等级,利用制动减速度曲线来衡量车辆之间发生碰撞的危急程度;然后根据聚类结果,使用在线安全指示器来确定风险级别。换句话说,提出的框架中,车辆减速度被视为实时驾驶风险的间接测量,离线减速度簇为基于安全指标的在线风险等级分类规则提供了依据。

图1 风险等级分类方法
1.1 数据的整合
减速度曲线数据来自中汽研汽车工程研究院道路测试组采集的乘用车道路测试数据库,用于风险等级分类。以0.1 s 的时间间隔记录事件前30 s至碰撞结束的车辆运动参数值,包括车速、加减速度、与周围车辆的距离及接近速度等。
1.1.1原始数据筛选
从数据库中选取399 例前向追尾碰撞类型筛选出385 例完整的减速度曲线,排除121 例通过转向来避免碰撞,剔除86 例涉及目标车辆变道或其他车辆超车引起的后方类追尾事故。最后通过查看上位机画面(图2)筛选出有效且完整的数据,总共获得了127个可用案例。

图2 道路测试上位机截图界面
1.1.2紧急制动曲线的提取
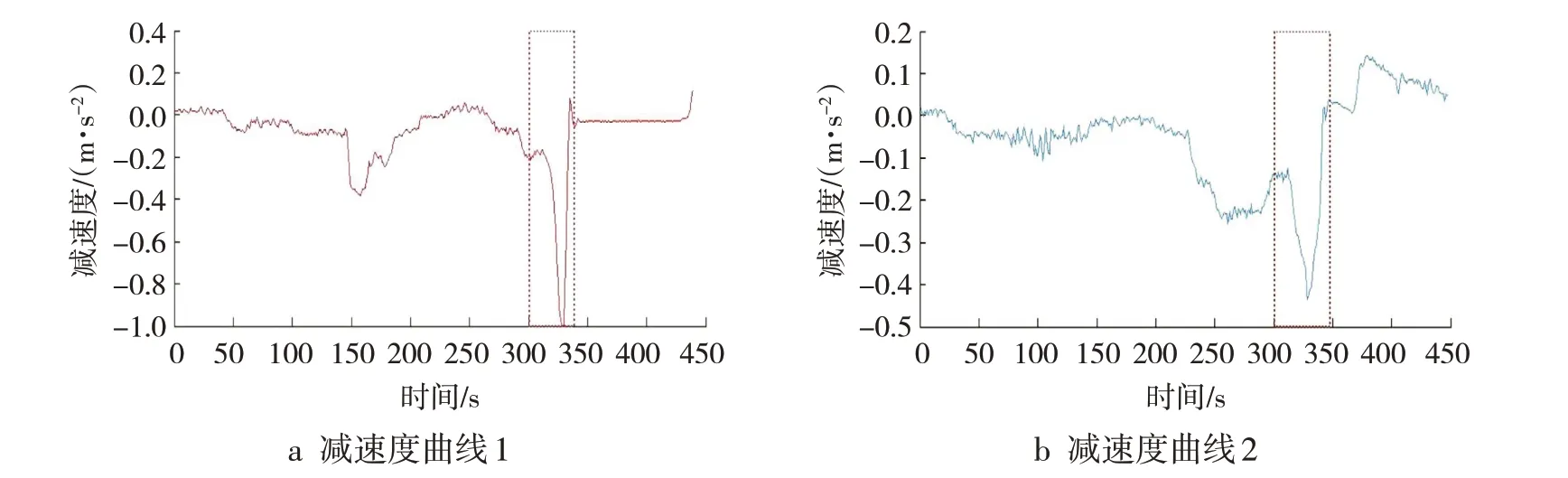
图3 从Natware中提取的减速度曲线
Natware软件将减速度信息可视化为曲线,“紧急事件—反应制动”被定义为制动踏板压力的突然增加导致减速度曲线急剧下降,如图3所示。当目标车减速时,后车驾驶员开始正常制动,制动减速度为-1~-2m·s-2;当目标车以很大的减速度减速甚至完全停止时,后车驾驶员以-3~-4m·s-2的减速度刹车,避免发生追尾事故。驾驶员开始制动的时刻视为“一般事件—反应制动”;驾驶员以更大力制动时为“紧急事件—反应制动”。开发避碰算法时,为了避免驾驶员反感,区分“一般事件—反应制动”和“紧急事件—反应制动”对避碰算法很重要。
从减速度曲线样本统计(图4)中可以看出:部分“紧急事件—反应制动”的初始减速度为负值,说明这些样本驾驶员在“紧急事件—反应制动”之前已经开始了“一般事件—反应制动”,此外样本的最大减速度可达-10 m·s-2,表明提取的部分减速度曲线实际上反映了最高风险水平的驾驶情况。

图4 减速度曲线统计数据
文中通过基于Natware软件的可视化减速度曲线检查,手动识别出每个样本记录的“紧急事件—反应制动”起始点,结果表明,减速度值持续减小,幅度大于-4 m·s-2时,这种情况驾驶员确实需要进行紧急制动以避免碰撞。
1.2 减速度曲线聚类
谱聚类将所有数据视为空间中的点,并假设所有数据点都由赋予权值的边连接。2 个点相似度越大,边缘权值越大。所有数据点之间边的权值构成邻接矩阵Wn×n,第i行和第j列的元素记录点i和点j之间的权值[5]。
对于减速度曲线聚类,总体减速度水平越高,减速度曲线变化率越快,一般表明驾驶员感知的风险水平越高,从不同的减速度曲线(边缘权重)中可获取2个参数,即“距离”度量标准和不同曲线变化率度量标准。
1)“距离”度量标准 事件从开始到结束的时间因情况而异,因此采用动态时间规整(dynamic time warping,DTW)算法计算所提取的减速度时间序列的DTW距离。2个时间序列的DTW距离是通过确定距离路径来计算的,路径上2点距离之和最小。2个时间序列X和Y分别有M个和N个采样点。定义X的第m个采样点之间的距离(X的第m列)和Y的第n个采样点之间的距离(Y的第n列)作为欧氏距离dmn(X,Y):

DTW算法是在距离格dmn中寻找2个路径序列ix和iy,使得采样点之间的距离之和最小,如图5中所示的折线。计算公式为

2个时间序列X和Y之间的DTW距离为

DTW 距离不需要从时间序列中提取特征变量(均值、最大值、最小值等),可以在整个时间序列中保留完整的减速等级信息。

图5 DTW距离计算图解

2)变化率的差值 在提取的减速曲线上的平均减速度变化率通常被称为Δjerk(减速幅度的增加与持续时间的比率)。Wn×n记录n个数据点之间的两两相似之处,1 个数据点指1 个减速曲线/时间序列,使用高斯径向基函数内核定义(典型的相似性表示度量)[6]:

式中:wij为数据点xi和xj之间的相似性;γ为尺寸参数,定义为1/nm,nm代表采用不同指标的数量,文中不同指标为DTW和Δjerk。将DTW和Δjerk归一化到0~1,消除维度对相似度测量的影响。利用Matlab 对提取的127 条减速曲线进行谱聚类。除谱聚类外,还以平均减速度、最大减速度、减速度曲线变化率等特征为基准进行K均值聚类,并与谱聚类进行比较。考虑到样本容量有限,选择K为2的聚类进行风险等级识别,聚类结果如表1 所示:谱聚类结果的平均最大减速度和平均减速度较高,但平均曲线变化率水平相对较低。由于制动过程具有较高的平均和最大减速度,且曲线变化率分别低了4.061 和1.003,因此谱聚类结果比K均值更合理。与K均值方法相比,谱聚类技术能更好地识别减速度曲线的高幅值和快变化率模式。Cluster1总体上具有更高的最大平均减速度水平及更快的平均减速度,因此将Cluster1 中的减速曲线归为高危险级别,而Cluster2中的被划分为一般风险级别。

表1 减速度谱聚类与K均值聚类结果对比
1.3在线风险等级规则提取
考虑到减速度曲线的风险等级,利用“紧急事件—反应制动”触发的安全指标,探索在线风险等级分类规则。
1.3.1安全指标选择
由于各单一安全指标的假设局限性,可能存在不同的缺陷,为克服假设的局限性,将3 个典型的驾驶场景用3个安全指标[7]分别来描述。
1)场景1试验车(SV)和前方目标车(POV)继续以当前的状态行驶,且SV的速度远大于POV的速度,其安全指标定义为碰撞时间TTC:

2)场景2POV减速,SV继续以当前行驶,其安全指标定义为车头时距THW:

3)场景3POV 减速后SV 也减速,选择潜在紧急碰撞减速指标PICUD,表示在最大制动力下两车同时减速时SV与POV的最终距离:

式中:vn和vn-1分别为SV和POV当前行驶速度和分别为临界情况下未来行驶速度;an和an-1分别为SV 和POV 在关键场景中的减速度;an,min和an-1,min分别为最大制动力下的最大减速度值,假设an,min、an-1,min和amin相等;sn为SV 到POV 的距离;th为驾驶员的反应时间。
3 种安全指标的变化规律如图6 所示,假设vn为60 km·h-1、amin为-8 m·s-2、th为1 s,颜色由浅色变为深色表示风险水平由低到高,可以看出,TTC、THW和PICUD在风险水平上表现出不同变化模式(放射状、带状和弧形),表明3 个安全指标的组合可以捕获到风险水平和相对距离标准之间的“线性—非线性”综合关系。

图6 安全指标在“相对距离—相对速度”平面图上的分布
1.3.2基于安全指标的分类规则提取
根据风险等级聚类结果,在“紧急事件—反应制动”时选择的安全指标统计如图7 所示:在制动开始时,TTC、THW和PICUD都分别集中在0.5s、0.7s和-6m附近[8],与定义的一般到高风险阈值基本一致,表明文中提取的减速度曲线在描述高风险驾驶情况时是有效的。与Cluster2相比,Cluster1的TTC、THW和PICUD一般较小,验证了Cluster1 代表高风险水平、Cluster2代表一般风险水平的结论。
“紧急事件—反应制动”开始时安全指标集合{TTC,THW,PICUD}的联合分布如图8所示,可以看出,TTC、THW或PICUD没有明确的阈值来区分不同的风险簇,需要探索更复杂的分类规则。驾驶风险水平实际上是模糊概念,可以从安全指标进行推理,模糊逻辑较好地适应了这一范围,被选为研究对象。在复杂情况下,利用{TTC,THW,PICUD}提取风险等级分类规则。

图7“紧急事件—反应制动”开始时安全指标统计

图8“紧急事件—反应制动”开始时的聚类分布

表2 风险等级分类规则输出混淆矩阵
规则提取问题被视为分类优化问题,混淆矩阵被定义为分类性能评价,如表2所示。对于每个减速度曲线样本,观察到的风险等级是指基于减速度曲线所分类的风险等级簇;而分类风险等级是指在“紧急事件—反应制动”起始时刻,将观察到的{TTC,THW,PICUD}输入到模糊逻辑,根据风险等级聚类结果,输出一般、高风险等级。分类后的样本分别标记为真阴性(TN)、假阴性(FN)、假阳性(FP)和真阳性(TP)。如任意曲线样本,如果模糊逻辑将其划分为一般风险等级,那么根据表2中的混淆矩阵将其分类输出标记为FN,这将直接影响分类性能评价的结果。具体来说,分类性能指数PI是利用2 个矩阵的真阳性率(TPR)和准确率(Pr)的几何平均值来定义的,选择TPR和Pr来平衡改善威胁态势检测和避免误报的目标。

式中:TPi,FNi,FPi(i=1,2)分别为分类样本数量。
模糊逻辑结构通常包括输入/输出隶属函数和模糊输出规则。对基于{TTC,THW,PICUD}风险等级分类的不同模糊逻辑结构进行分析,试验结果表明z形、s形和三角形隶属函数分类效果最好。z形、s 形和三角形隶属函数是根据Matlab 内置的格式定义的[9-10],如图9所示。gap1、gap2和gap3分别为TTC、THW和PICUD的隶属度分段特征。gap1是TTC一般风险和高风险的时间差,此时图9a中

当TTC小于TTC1时,对应的输入变量TTC被标记为高风险的概率为100%;当观察到TTC大于(TTC+gap1)时,100%概率为一般风险;当观测到间隙之间的TTC时,根据各自的隶属函数分配高风险和一般风险的概率。gap2是THW高风险和一般风险的时距差,此时图9a中

gap3是PICUD高风险和一般风险的距离差,此时

采用最大均值去模糊化方法生成模糊逻辑的最终输出,输出值范围[0,0.5]为一般风险水平,(0.5,1]归类为高风险水平,最终得到的输出变量模糊规则如表3所示。
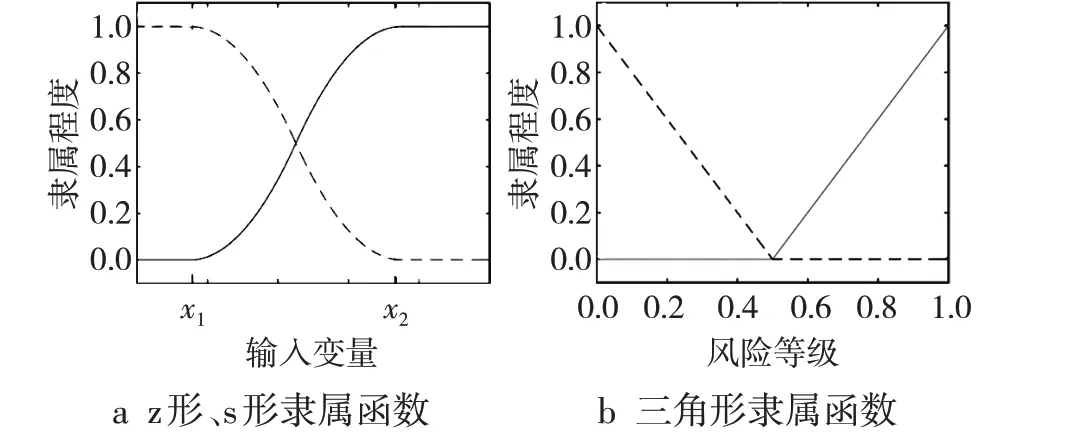
图9 z形、s形和三角形隶属函数

表3 输出变量模糊规则
PI是给定观测样本需要优化的目标值(性能指标),不同的输入参数集合:

可能导致PI值不同,因此参数的调整实际上是参数优化问题,可以用粒子群算法来解决。考虑到PI函数形式的复杂性,利用

加速计算。具体来说,四次幂可以抵消PI内可能影响PSO算法性能的双根操作;在适应度函数的形成过程中,由于粒子群优化算法总是求出最小值,所以加入负号。基于Matlab 的PSO 算法得到参数集x的最优解,如表4 所示;PSO 迭代过程如图10所示,其中适应度函数的最优值-PI4为-0.588,相当于性能指标PI为0.876。

表4 最优模糊参数
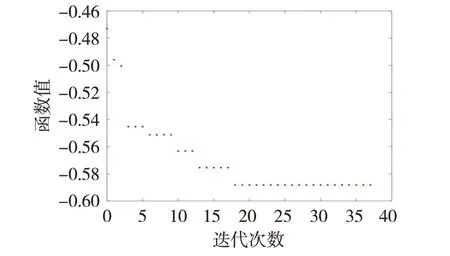
图10 Matlab中粒子群算法优化迭代输出最优值
根据上述最优模糊参数,通过模糊逻辑输出PICUD值增加时,TTC-THW输出值总体呈下降趋势,符合期望,总体风险水平随着PICUD增加而降低。结果表明,只使用1个安全指标很难完全反映驾驶环境的风险水平的线性/非线性特征。采用基于模糊逻辑的规则,将不同危险驾驶场景的安全指标进行整合,可以提高风险等级分类的准确性。
2 仿真测试及结果
选取Euro-NCAP 2020 提出的AEB 测试场景,对文中避碰算法进行验证。根据POV的运动状态将测试场景分为前车静止(CCRs)、前车低速行驶(CCRm)和前车紧急制动(CCRb),如图11 所示。CCRs 场景SV 的速度分别为30 km·h-1、40 km·h-1、45km·h-1、50km·h-1、55km·h-1、60km·h-1、65km·h-1、70 km·h-1、75 km·h-1、80 km·h-1;CCRm场景SV的速度分别为30 km·h-1、40 km·h-1、50 km·h-1、60 km·h-1、70 km·h-1、75 km·h-1、80 km·h-1,POV 的 速 度 为20 km·h-1;CCRb 场景SV 的速度为50 km·h-1,POV的速度为50 km·h-1,POV 的减速度为-2 m·s-2和-6m·s-2。

图11 Euro-NCAP 2020 AEB测试场景
根据SV 停止时SV 前端到POV 后端的最终距离来评估算法的性能,即最终相对距离dend。较大的平均dend意味着系统更保守,而较小的平均dend意味着系统更极限。一般来说,过于保守的系统会干扰驾驶员的正常驾驶,而过于极限的系统会导致避碰失败,因此需要对FCAS权衡[12]。从仿真结果可看出,模糊逻辑算法和马自达算法在所有Euro-NCAP 测试场景下都可以避免碰撞,即dend大于0。然而模糊逻辑算法(dend∈2~12 m)相比马自达算法(dend∈6~20 m)更优秀,马自达算法在CCRm 场景下dend特别大,当自车速度为80 km·h-1时,dend为20m;而模糊逻辑算法dend为2m,如图12所示,因此在不影响驾驶员驾驶体验且保证成功避碰的情况下,用模糊逻辑算法来确定紧急制动触发的时机比马自达算法更好。同时贝克利算法、本田算法和SeungwukMoon算法在多个CCRs和CCRb场景中无法避免碰撞,特别是自车速度很大、目标车减速度很大的情况,几个成功避撞试验中这些算法下的dend小于2m,说明与模糊逻辑算法相比,这些算法都过于极限,容易避碰失败,如图13所示,图13c中横坐标a1表示POV减速度为-2 m·s-2、a2表示POV减速度为-6 m·s-2。文中提出的模糊逻辑算法在权衡成功避碰与保证驾驶员良好驾驶体验方面取得了良好的效果。

图12 Carsim/Simulink联合仿真测试

图13 测试结束时车辆的相对距离
3结论
通过谱聚类技术对数据库中的减速度曲线进行分类及TTC、THW、PICUD等在线安全指标建立模糊逻辑,提出基于模糊谱聚类分析的在线风险等级分类避碰算法(FCAS/PCW);在AEB测试场景下进行仿真验证,结果表明制动后两车最终相对距离优于其他算法,在权衡成功避碰和不影响驾驶员体验方面效果良好。由于分析的数据样本有限,离线减速度曲线与在线制动控制之间的联系还有待进一步研究,后续可进一步实现人在环的研究,评估算法对驾驶员正常驾驶的干扰。