一种面向航天需求的仿生柔性机械臂的设计
2020-04-22于仕泽王周义戴振东王炳诚谷雨宗卫佳
于仕泽,王周义,戴振东,王炳诚,谷雨,宗卫佳
(南京航空航天大学 航天学院,江苏 南京 210016)
0 引言
近年来,随着航天活动的不断增加,对于航天任务的要求也不断提高。针对航天器内狭小空间的操作任务需求不断增大,航天员及传统机械臂在狭小空间操作难度大,且效率低、安全性较差等问题,迫切需要一种面向航天需求的柔性机械臂。
柔性机械臂具有超冗余自由度、操作空间限制少等诸多优良的特性,得到越来越多研究学者的关注,并被广泛应用于火灾救援、核电站、废墟[1]等狭小空间的探测以及医疗领域上人体口腔、食道内部的检测。其发展历史可以追溯到20世纪60年代蛇形机器人的问世,至今发展历史已达半个多世纪。柔性机器人可分为蛇形机器人与连续机器人[2]。蛇形机器人较长,例如OC robotics研制的蛇形机器人[3],长度1200mm,直径100mm,每一段由电机拖动驱动钢丝线实现关节转动。
连续机器人的概念源自于哺乳动物的“脊柱”这个词。哺乳动物的脊柱近似可以看作是一个具有许多万向铰链连接的超冗余结构体。此概念启发了许多研究学者,目前世界上主要利用弹性体、气动肌肉或记忆合金材料作为连续机器人的“脊柱体”。弹性体“脊柱体”主要利用驱动线驱动,利用弹性体丰富自由度完成复杂动作,例如2013年香港中文大学Z. Li 提出的仿生线驱柔性机器人[4],直径达20mm。气动肌肉组成的柔性机械臂主要以2014年德国festo公司提出的气动象鼻机器人[5]为代表,其长度达850mm,最大直径达到130mm。2012年LASCHI等人提出一款由记忆合金SMA组成的柔性机器人[6],这款机器人直径在30mm~35mm之间,可完成直径为63mm的圆弧弯曲。
本文提出一种基于仿象鼻结构的柔性机械臂SY-Biotrunk。该柔性机械臂由8个柔性关节连接,单个关节具有3个自由度。驱动模式采用电机螺纹配合驱动。这种设计具备诸多优点:1) 机械臂灵活性较强,并且关节拓展性较强,可根据实际情况搭接更多关节; 2) 结构刚度较高,关节之间采用螺纹杆连接,相比于弹性体,刚性螺纹杆可承受更大载荷;3) 控制精度较高。每个部分的位置姿态由3个并联电机输入决定,并联平台具有较高的控制精度;4) 机器人整体安全性较强,由于这种柔性机械臂的连接方式为螺纹杆与内螺纹连接,在遭遇断电、信号中断等因素时可以保持机械臂姿态不发生变化。
1 仿生柔性机械臂SY-Biotrunk的设计
象鼻是一个万用器官,不仅可以用来取食、喝水,还可以用来社交,并具备非常敏锐的嗅觉,其功能离不开象鼻内部特殊的结构组成。象鼻内部超过15万组肌肉单元[7]里面却没有鼻骨。象鼻内部的肌肉分为纵肌与横肌,纵肌纵向排列在象鼻内部,控制象鼻向四周弯曲。而横肌主要分布在象鼻2个鼻腔附近,用来改变鼻腔的内部空间,象鼻正是运用横肌得以完成吸水、喷水[8]。
从象鼻内部结构与运动特点可以得知,象鼻之所以拥有大自然独一无二的灵活性,主要取决于内部丰富的横肌、纵肌分布。面向具体的航天避障、擦拭与检测等任务,以象鼻内部结构为仿生设计对象,设计一种仿生柔性机械臂。
柔性机械臂的关节采用三轴并联平台的方式设计。该关节可实现纵向收缩,也可实现灵活的万向弯曲,使象鼻内部的横肌、纵肌功能得以实现。将若干柔性关节单元交错连接,最终设计出仿生柔性机械臂如图1所示。
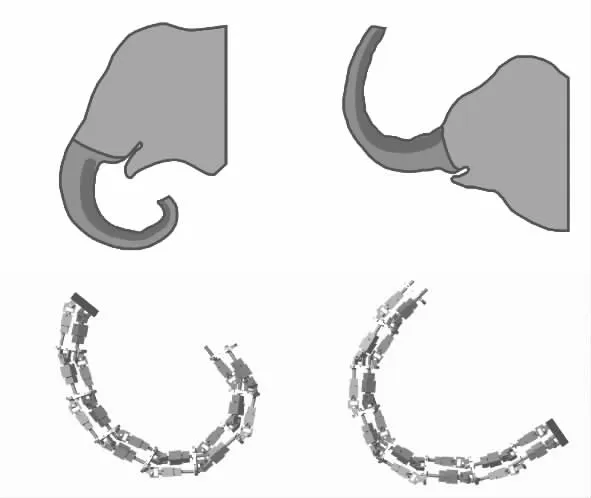
图1 机器人设计的仿生原理
1) SY-Biotrunk的设计参数
本文设计的仿生柔性机械臂的结构参数如表1所示,机身材料为硬铝合金。整体结构如图2所示。
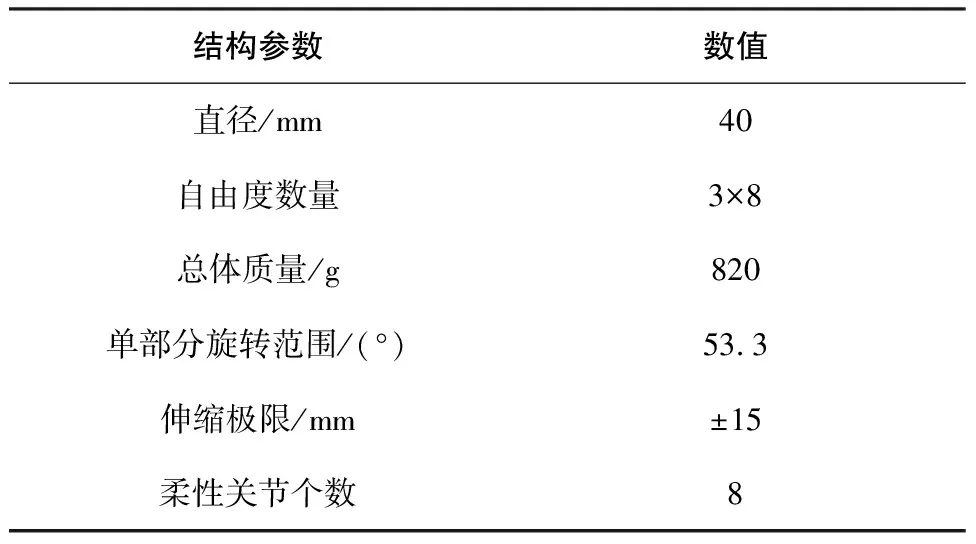
表1 SY-Biotrunk结构参数

图2 SY-Biotrunk整体结构
如图2所示,柔性机械臂SY-Biotrunk由8个柔性关节单元组成。单个柔性单元为三轴并联平台,由3个子链将上下2个平台(静平台与动平台)并联所组成。单个子链分别由1个万向铰链(2个自由度)、输出轴为螺纹杆的电机和与下一个平台连接的旋转螺母3部分组成。不难得到,单个子链的自由度数量是5。上下部分采用交错相位式连接,相邻部分相位差为60。下方部分可以将输出螺纹杆进入到上方部分,完成机构运动。这种串联方式可以有效地利用轴向空间,相比于活塞式配合模式,可以使用较少的轴向空间完成相同的转动角度。根据机械结构的规划,可以确保在一定角度的旋转范围内相邻部分不发生机械干涉。交错式相位连接可以使得整体柔性机械臂在轴向每隔60均有螺纹杆支撑连接,并采用同相位的连接方式,相邻连接螺杆相位差为120。不难发现具有交错式连接方式的柔性机械臂在各个方向抵抗弯矩的能力更为均衡。柔性机械臂每个部分转动极限(图3) 为53.3,与相近尺寸类型的柔性机械臂相比,具有较大的转动性能优势。
柔性机械臂往往需要在一些环境复杂的工作空间操作作业。对于障碍物较多的环境,SY-Biotrunk具有良好的环境适应性。,这种机械臂转弯直径仅为216.3mm,并且这种仿生柔性机械臂的结构具备良好的拓展性,可根据实际的环境情况需要增加更多的串联部分,可充分发挥结构的灵活性能。
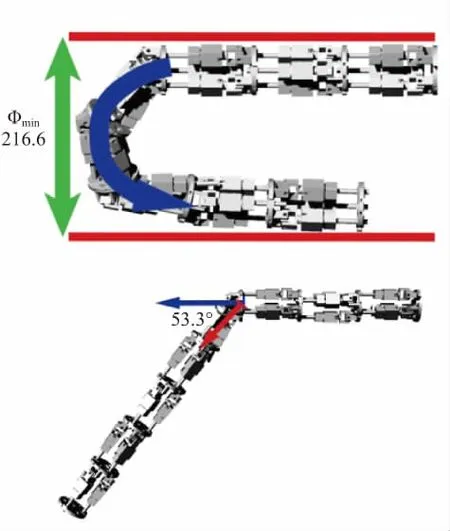
图3 SY-Biotrunk转动性能
2) 柔性机械臂的运动学分析
对SY-Biotrunk仿生柔性机械臂的运动学分析,首先对柔性关节单元建模分析。以定平台中心建立坐标系,描述动平台欧拉角姿态变换,进一步求三轴的空间矢量,如图4、图5所示。

图4 支链设计示意图

图5 单个部分结构示意图
(1)
(2)
(3)
求得连杆矢量为:
(4)
根据单链约束关系,求得伴随运动关系:
(5)
当单个平台绕K轴旋转θ,其中K=kxi+kyj,可以得到:
(6)
其中:Vsθ=1-cosθ;sθ=sinθ;cθ=cosθ。
因此,当柔性机械臂完成类似弹性体连续曲率弯曲时,运动学转换矩阵为:
(7)
工作空间是机械臂灵活性能的重要属性。并联机器人学中,操作空间一般分为可达位置空间、灵活位置空间等。本文将对所提出的仿生柔性机械臂可达位置空间进行讨论。
对于柔性关节单元采用基于Matlab的仿真分析方法,将柔性机械臂在Matlab-simechanics建立数学模型,在软件工作空间记录运动轨迹并描绘出操作空间三维图形。仿真结果如图6所示。
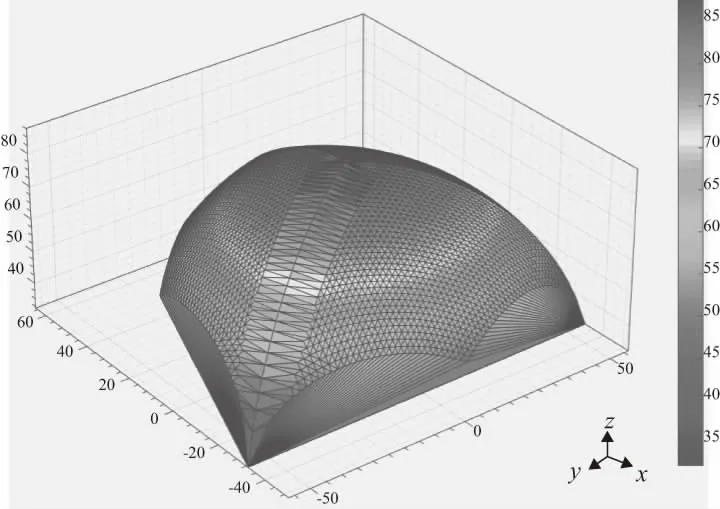
图6 柔性关节工作空间
2 面向航天避障任务的操作实验
前文提到,在航天环境内,存在诸多重要的而航天员不易进入的狭小环境。基于所设计的仿生柔性机械臂功能,提出几种具体航天任务的路径规划,并完成在模拟太空环境中的操作实验。
为满足航天器内狭小空间的操作任务,在微重力实验平台进行航天器空间障碍物的模拟搭建。通过开环控制机械臂穿越障碍物,以此验证所设计的柔性机械臂具备在狭小空间内操作作业的机械性能。
根据有关柔性机械臂机械性能相关参数以及避障策略的内容,对SY-Biotrunk进行避障实验(图7) 。从图7中可以看到柔性机械臂在有限空间(44cm×33cm)内完成体积压缩并获取足够操作空间。
实验过程如下:首先柔性机械臂调整末端姿态适应待进入空间的姿态;之后柔性机械臂开始释放被压缩体积,使得末端开始慢慢进入狭小空间(宽度为87mm通道),最后柔性机械臂慢慢适应狭小空间,可以进行接下来的操作任务。
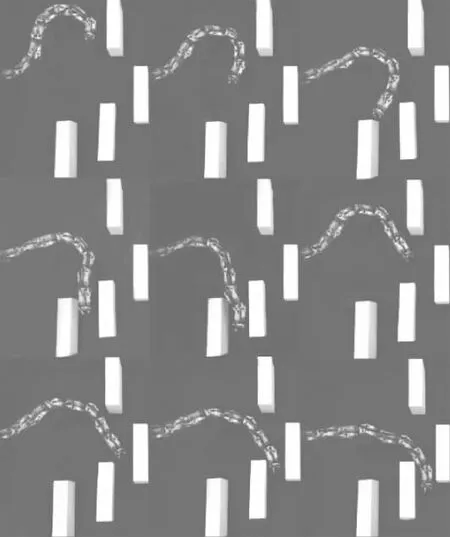
图7 SY-Biotrunk避障实验
3 SY-Biotrunk与其他机械臂的性能对比
结合航天需求与结构轻量化、结构刚度、运动灵活性、机构稳定性几个方面的机械属性,本文将所提出的仿生柔性机械臂与其他机械臂进行比较。
1) 结构设计轻量化比较
面向机器人在航天器的在轨服务,欧美等国家常用做法是在航天器设置机械臂接口安装大型机械臂[9],实现移动与作业。对于航天器中狭小环境,本文所提出的柔性机械臂结构紧凑,直径仅仅为40mm,可搭载在移动平台检测作业,解决了传统机械臂在航天器内工作空间受限、灵活性较低等难题。随着研究的深入,所提出的柔性机械臂可搭载移动平台(移动机器人)进行舱外作业,可部分替代航天员作业,具有十分广阔的应用前景。
2) 机械臂整体刚度比较
目前柔性机器人领域提出了诸多轻量化设计(直径不超过50mm)的柔性机器人,部分已经在医疗内窥镜领域[9]开始投入使用。而轻量化柔性机器人的驱动单元一般分为线驱动单元与气动人造肌肉单元。两种驱动单元依靠柔性材料丰富冗余自由度提高自身灵活性,但同时也大大降低机械臂的整体刚度,并且不利于控制,在完成具有末端应力的航天舱作业任务存在缺陷。本文提出的仿生柔性机械臂全机身无柔性材料,关节间采用刚性三轴连接,保证机身具备较强刚度,末端可承受相比其他同类机械臂更大负载应力。
3) 机械臂运动灵活性比较
本文提出的仿生柔性机械臂由若干柔性关节单元组成。每个柔性单元具有3个自由度,而常见的柔性机械臂关节大多以万向2个自由度设计,传统机械臂却只有1个自由度。在关节的弯曲性能上,仿生柔性机械臂最大可弯曲53.3,而一般的柔性机械臂大多关节仅仅可以转动30左右。在太空操作环境下存在大量原子氧,一些高分子材料容易发生老化,所以高分子弹性体或人造气动肌肉不适合在此环境下工作。
4) 机械臂操作安全性比较
一般由电机驱动的轻量化柔性机械臂由于结构原因,伺服电机不具备自锁功能,而本文提出的仿生柔性机械臂关节由螺杆螺纹配合,轴向具有自锁属性,在发生断电故障后可保持工作状态不发生变化,不会受到惯性力和惯性力矩的干扰。所设计的仿生柔性机械臂以更可靠的机械性能保证了航天作业的安全性。
4 结语
本文借鉴于自然界象鼻的内部组织和灵活特点,提出了一种仿生柔性机械臂SY-Biotrunk的设计方案。这种机械臂由若干柔性单元关节组成,具备结构紧凑、质量轻、灵活性较强、整体刚度强、安全可靠性较高;并对航天作业需求有非常强的适应性。计算了仿生机械臂各柔性单元之间位置姿态变换的位置空间,并对具体的航天实际环境进行机械臂操作实验。就所提出的仿生柔性机械臂与其他柔性机械臂作出比较,分析了所提出的柔性机械臂对于航天环境的适用性。
本文所做工作仅面向航天任务作业的机械臂系统研究的一部分,未来将由以下几方面进一步开展工作:在每个关节侧面安装超声波传感器,并提出自主避障算法,使仿生柔性机械臂具备自主避障能力;在各关节动平面安装陀螺仪模块,用于弥补应力或惯性力对仿生柔性机械臂造成的误差;进一步改进仿生柔性机械臂的结构,并面向其他航天任务进行算法控制与实物实验。