恒力矩摆杆机构的设计
2020-04-22韩嘉骅赵志远张宁宁
□ 徐 锐 □ 韩嘉骅 □ 赵志远 □ 张宁宁
四川大学 机械工程学院 成都 610065
1 设计背景
目前,在港口起重、工程机械、海洋船舶、高铁动车、航空航天等工业控制领域中,有时需要人为去操作控制部件,实现机器动作。挡位操控杆可以承担这一重要的人机交互任务,针对其中运用较为广泛的自复位式挡位操控杆,笔者提出一种新型复位方式。这种复位方式能够保证恒定的复位力矩,使操控杆回位至初始平衡位置。工程机械中一些操控杆的操控力度较大,工作数小时后易产生疲劳,主要原因是这些操控杆的自复位机构通过强力弹簧直接或间接恢复至中间位置,且操控力的大小与弹簧的拉伸、压缩量近似成线性关系。由此可见,设计一种恒力矩摆杆机构,对避免操控杆操控力度过大有重要意义。
恒力矩摆杆机构的设计原理来源于恒力机构。恒力机构是一种在载荷产生位移时仍输出近似恒力的装置,不满足胡克定理,与传统的圆柱弹簧或其它弹性体有本质区别[1]。对于这种通过力传感器和控制器来保证恒力输出的传统恒力装置,需要复杂的算法设计,并且依赖于传感器的精度及后续的调试过程。使用特殊机构保证在一定范围内输出恒力,方法更加简洁,且不需要高额的费用支持[2]。如今,恒力机构广泛应用于各种工业装备中,如支吊管道恒力弹簧支吊架[3]、带式输送机恒力自动张紧装置[4]、印刷机中克服递纸牙运动惯性力所使用的恒力机构[5]等。大部分恒力机构产生恒力的原理是通过弹簧和可变力臂配合,基于力矩平衡原理,在某一运动方向上产生恒定的力。笔者参考凸轮式恒力机构的设计方案,设计出一种通过特殊曲面产生恒力矩的摆杆机构[6]。
2 恒力矩摆杆机构结构
恒力矩摆杆机构结构如图1所示,主要包括摆杆、滑杆、滚子、底板等。对底板上表面的曲面轮廓线进行设计,保证在不同的接触点上,套装在导管和滑杆上的压缩弹簧能给予摆杆恒定的回复力矩。

初始位置时,滚子受压缩弹簧预压力作用,定位于底板凹槽。当摆杆偏转一定角度时,底板对滚子的支撑力和压缩弹簧的回复力同时作用,使摆杆回复至初始位置状态。随着摆动角度的增大,压缩弹簧的压缩量变大,使摆杆回复的合力也增大,而底板上的曲面轮廓线变化会使滚子与旋转中心的力臂变短,进而使摆杆对旋转轴产生的力矩恒定。改变压缩弹簧的初始压缩量和弹簧弹性系数,可以对恒力矩的大小进行调节。
3 底板轮廓线设计
如图2所示,为便于分析,将摆杆底端视为顶尖A。首先计算出顶尖A的运动轨迹轮廓线,即底板的理论轮廓线,对应图2中虚线部分。然后通过理论轮廓线外侧等距滚子半径r,得到实际轮廓线,对应图2中实线部分。为使摆杆最终能够输出恒定的力矩,推导过程中可视摆杆在受到恒定力矩M时以角速度ω匀速摆动,摆杆处于中位时的长度为r0,摆杆摆动角度θ后伸长量为ρ。

对摆杆顶尖A处进行受力和速度分析,分别如图3、图4所示。O点为摆杆旋转中心点,顶尖A与底板的接触点处切线为τ-τ[7],切线τ-τ与水平方向的夹角为φ。
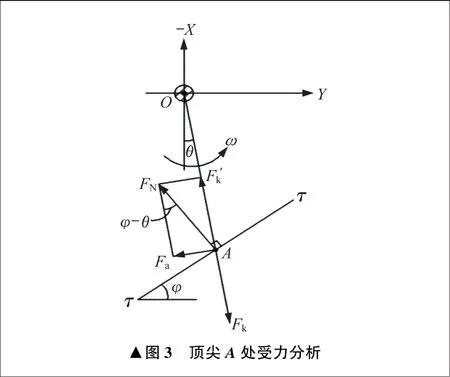

根据受力分析可知:
(1)
Fa=FNsin(φ-θ)
(2)

的夹角;θ为摆杆摆动角度;Fk为弹簧在摆杆顶尖处的弹力;k为伸缩弹簧的弹性系数;s为伸缩弹簧的压缩量。
根据式(1)、式(2)可知:
Fa=kstan(φ-θ)
(3)
进行速度分析,取顶尖A为动点,绝对速度Va方向为点A在底板接触面的切线τ-τ方向。将动系固定在滑动杆OA上,相对运动是沿OA方向的直线运动,牵连运动是摆杆绕O点的轴摆动。
相对运动速度Vr为:
Vr=Vasin(φ-θ)
(4)
牵连运动速度Ve为:
Ve=Vacos(φ-θ)
(5)
由式(4)、式(5)可得:
(6)
由ω=dθ/dt,可得:
(7)
摆动过程中要保证力矩M恒定,由式(3)、式(7)可得:
M=Faρ=ksds/dθ
(8)
式(8)等号两侧同时积分,可得:
(9)
式中:C为常数。
为保证中位状态时摆杆位置稳定可靠,设置中位状态时弹簧预压缩量s为5 mm,摆杆长r0为50 mm,选用弹性系数k为10 N/mm的压缩弹簧,得常数C为250。在不考虑摩擦力的情况下,设置需求的恒定力矩M为2 000 N·mm,可得该底板曲面轮廓线的极坐标方程为:
(10)
4 摆动角度范围设计
支撑力FN沿垂直摆杆运动方向的分力为Fa,使滑杆紧压摆杆的导管。若Fa过大,则会产生阻碍摆杆沿导管运动的摩擦力。
不考虑各种运动副中的摩擦力、构件重力和惯性力的影响,φ-θ即为压力角[8]。底板曲面轮廓线上各点的压力角是变化的,在设计时应考虑最大压力角不大于许用值。为使摆杆在摆动过程中能正常运行,需对压力角进行一定限制。
将摆杆顶尖A处坐标值沿X、Y坐标轴进行分解:

(11)
切线τ-τ与X轴夹角的正切值即为斜率:
(12)
则有:
(13)
(14)
将式(10)代入式(14),可得6.308°≤θ≤245.392°,且底板倾角φ≤90°,综合后可取6.308°≤θ≤60°。大多数操控杆的摆动角度在0°~30°之间,因此,在上述摆动角度范围内,可以设最大摆动角度为30°。
由于摆杆左右摆动角度对称,因此摆动角度范围为-30°≤θ≤30°。
5 底板轮廓线计算
底板理论轮廓线在直角坐标系中的坐标方程为:
(15)
代入各参数值后,通过Matlab软件进行数值计算,得出相应数据点坐标值,拟合出底板理论轮廓线,如图5所示。

6 动力学仿真分析
将Matlab软件得到的底板理论轮廓线坐标数据输入SolidWorks软件,拟合得到底板理论轮廓线,底板实际轮廓线由理论轮廓线沿法向外侧移动等距滚子半径r得到,r取4 mm。将SolidWorks软件中建立的模型导入Adams软件,进行动力学仿真分析[9]。
为使仿真更加符合实际情况,添加零部件材料属性及底板与滚子之间接触摩擦力等约束条件,研究摆杆机构保持恒力状态的特性。模型运动约束见表1,模型力约束见表2,模型仿真参数见表3。

表1 模型运动约束

表2 模型力约束

表3 模型仿真参数
仿真后摆杆机构输出力矩曲线如图6所示。在指定的摆动范围内,仿真模型的力矩平均值为2 006.85 N·mm,相对误差为0.34%。仿真模型的力矩曲线表现为上下波动,主要原因是滚子和底板之间为刚体接触,仿真过程中刚度较大,滚子和底板间产生碰撞,致使两接触面间产生接触力不稳定的现象。从初始阶段到结尾阶段,波动的幅度逐渐增大,主要原因是底板的接触面以多段线形式组成,由式(10)可知摆动角度越大,曲线的曲率半径越大,接触点数越稀疏,碰撞变化程度越重,加之弹簧压缩量的增大也会导致滚子与底板间接触力的影响增大,致使曲线波动变大。综合上述仿真结果证明,所设计的摆杆机构在一定的摆动角度内能够保证恒定力矩输出,同时也验证了计算的正确性。

7 恒力矩摆杆机构的演变
对于恒定力矩需求较大且弹簧无法获取较大弹性系数的单列摆杆,或者对于接触表面刚度要求过大的单列摆杆,可以通过并联方式形成多列摆杆,甚至可以在满足双向摆动角度小于90°的情况下上下或左右同时安置对称式摆杆,其排布如图7所示。
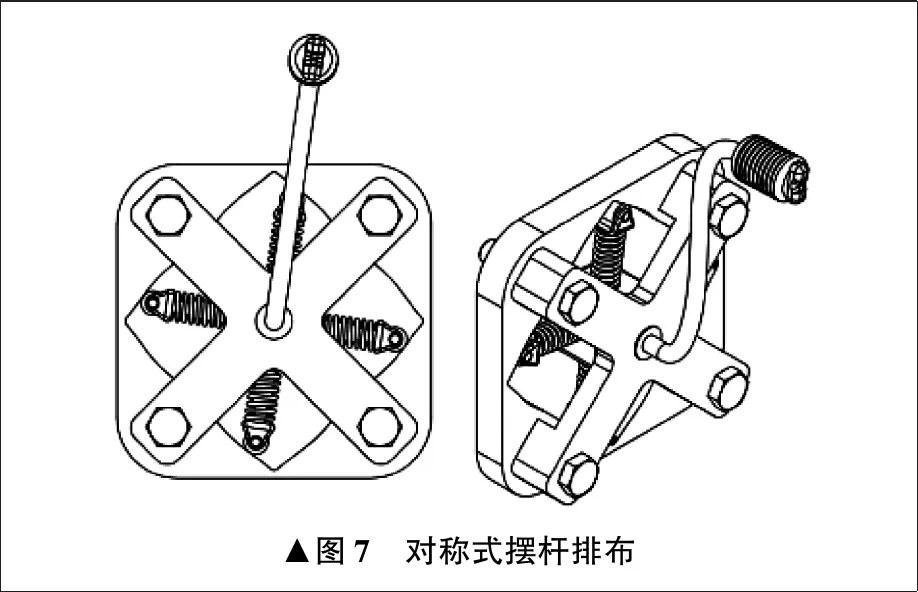
单摆杆的旋转轴只在一个方向上承受弹簧的压缩力,而对称式排布能够有效平衡旋转轴的径向压力,减少磨损,并且能够通过选用相同弹性系数的弹簧达到多倍的恒力矩效果。
另一方面,改变底板轮廓线,以垂直的中位轴线为轴,旋转生成锥形的底板上表面,摆杆以万向节的摆动方式固定,还能达到全方位式恒力矩的效果。
类似演变的方式还有很多,可以适用于多种不同的应用场景,例如替换发明专利[10]中的电子换挡器挡位槽,改善飞机侧杆的操纵力[11]。
8 结束语
根据恒力机构原理,笔者设计了一种恒力矩摆杆机构,适用于自复位摇杆装置。在设计中对底板接触曲面轮廓线进行计算,使摆杆摆动过程中底板对滚子的支撑力和压缩弹簧对滚子的压力形成的合力与旋转中心之间力臂的乘积保持不变,以产生恒定的输出力矩。通过Adams动力学仿真软件对所设计的恒力矩摆杆机构进行验证,表明摆杆在一定的摆动角度范围内能够获得恒定的力矩。
这一机构产生恒定力矩的方式能够演变出多种用法,如对称式排布、全方位式等,以获取更大、更稳定的复位力矩。
