基于MATLAB的轻型无人直升机V带传动张紧机构分析
2020-04-22赵少魁许欣宇贾良现
赵少魁, 许欣宇, 贾良现
(一飞智控(天津)科技有限公司,天津 300450)
无人直升机因其飞行方式灵活、场地适应性强等多种优点,得到了广泛的应用。军用方面,可作为对地攻击、侦察巡逻、反潜扫雷、通信中继的有利武器。在民用方面,可以作为大气监测、地质勘探、森林防火、交通监控的空中平台[1-2]。
V带主要用于平行轴之间的动力传递,其作为轻型无人直升机传动系统中的减速组件,相对于齿轮减速组件,具有轻量化、减速比选择范围宽、隔振、噪音小等优势,降低了传动系统的设计难度[3]。
V带主要靠带与带轮之间的摩擦来传递发动机的动力,为减小皮带滑移[4],保证动力传输的稳定,皮带需要增加张紧机构,其还可替代直升机中起动离合器[5],控制发动机与传动系统间动力的通断。
张紧机构主要作用是调节皮带张力大小,张紧力过大会降低皮带使用寿命,张紧力过小会导致皮带打滑[6]。此外,在张紧机构工作过程中,V带设计参数也会影响V带张紧力的大小[7-8]。
为研究张紧机构设计方法,实现对其准确控制,以及实时调整,保证V带处于理想工作状态。以轻型直升机传动系统中常见的V带组件为对象,阐述其张紧机构设计原则,分析其工作原理,建立参数化模型,对V带张紧程度进行建模。最后,通过MATLAB软件对其模型进行仿真,分析V带设计参数对V带基线长度与张紧机构工作行程之间关系曲线的影响。
1 张紧机构
1.1 张紧轮设计原则
V带主要依靠带与带轮之间的摩擦力传递发动机的功率,摩擦力是由皮带与带轮之间的正压力产生的,正压力的来源是皮带张力,因此带的张力是决定V带工作能力的关键因素。
带的张紧程度不仅决定了传动能力,还与皮带的寿命和带轮的压轴力有很大关系。张紧机构的应用实现了V带张紧力可调,提高了带轮组件的使用性能。
张紧机构的设计原则[9-10]如下。
(1)内侧张紧轮比外侧张紧轮直径小,内侧张紧轮不小于传动系统中最小的承载带轮或所使用带型的最小许可带轮直径。
(2)一般地,窄形带的内侧张紧轮采用三角带轮,联组带和传动三角带的张紧轮可以采用三角带轮和平带轮,外侧张紧轮必须采用平带轮。
(3)多槽传动时各轮槽型要一致,配装的带长要一致,以使各传动带受力均匀。
(4)张紧轮轴应与大小带轮轴保持平行,而且不应使皮带产生扭曲。
(5)张紧轮和大小带轮对应槽形的对称面应重合。
(6)张紧轮应布置在V带松边一侧,在往返传动中一定不要使用弹簧加载的张紧轮。
(7)带的跨度中张紧轮的位置,V带张紧轮如果放置在皮带内侧,应靠近大带轮,以减少包角影响,如图1所示;如果放在外侧,应靠近小带轮,确保张紧轮的包角弧尽可能小,如图2所示。
(8)如果可能,张紧轮应该布置在内侧,否则,带的交互挠曲将降低带的使用寿命。
(9)对于平带轮,无论是内侧张紧轮或外侧张紧轮,尽可能远离带运转的三角带轮。这样,可以避免张紧轮和带轮之间的对齐错误以及带轮上带的侧面移动。
(10)理想状态,当张紧轮达到最大极限位置时,两个带轮上的包角弧应相同,此时,带的拉伸为最大值。

图1 张紧轮布置在内侧Fig.1 The tension wheel on the inside
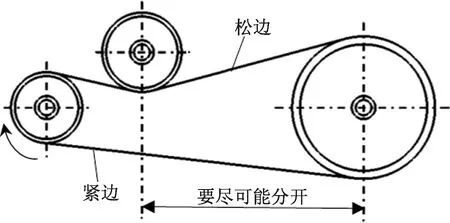
图2 张紧轮在外侧Fig.2 The tension wheel on the outside
1.2 张紧机构构型
以一种典型的张紧轮机构为例,分析其在张紧过程中,V带张紧程度与张紧轮工作行程之间的关系。其由大带轮、小带轮、张紧轮和V带组成,张紧轮布置在外侧,如图3所示。
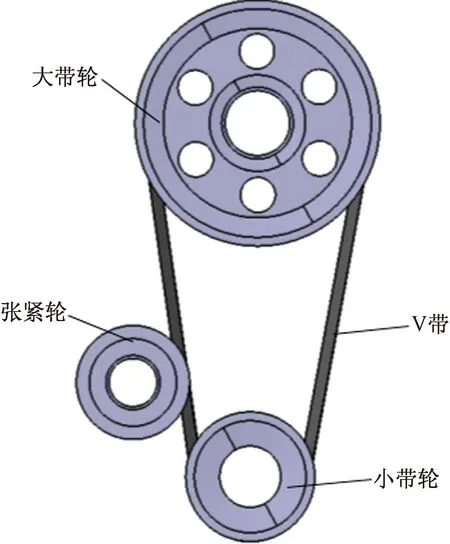
图3 V带张紧机构构型Fig.3 V-belt tensioning mechanism
2 V带基线长度建模
根据张紧机构的构型可以将其简化,然后用几何的方法,建立V带基线长度与张紧轮工作行程之间的参数化模型。
2.1 无张紧轮情况
首先,在固定中心距且无张紧轮情况下,计算V带基线长度。假设在此情况下V带是工作状态,即V带满足张紧力的要求。
建立V带基线长度模型,如图4所示,闭合曲线DEFH为V带基线长度;直线CD为辅助线,其方向与直线DE一致;直线AE、OD分别为大小带轮的半径R、r;直线OA为带轮组件的固定中心距a。
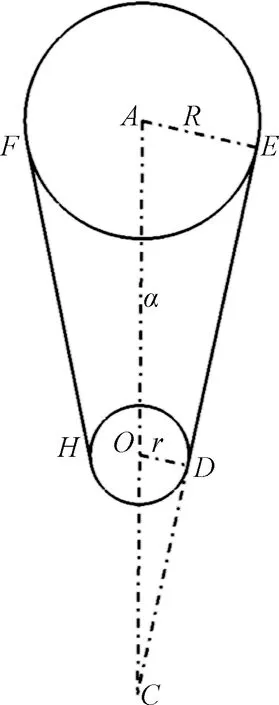
图4 固定中心距且无张紧轮状态下V带基线长度模型Fig.4 V-belt length model with fixed central moment and no tension wheel
根据图4中△COD和△CAE相似,可得:
(1)
(2)
推得:
(3)
进而,可得到∠COD和∠CAE的大小:
(4)
因此:
LDE=asinα=LFH
(5)
(6)
(7)
因为V带基线长度为直线DE、圆弧EF、直线FH、圆弧HD长度的总和。根据式(5)~式(7),可得V带基线总长为
LDEFH=2asinα+2R(π-α)+2rα
(8)
式(8)只与a、R、r有关,而这三个参数是设计量,所以可得到在固定中心距且无张紧轮状态下,V带的基线长度为LDEFH。
2.2 张紧轮与V带相切
增加张紧机构后,V带基线长度的变化与张紧轮工作行程相关。为求解其关系,首先,需要找到张紧轮轮心的坐标点,及张紧轮与V带刚接触时的接触点坐标,即张紧轮与V带刚接触时的切点。
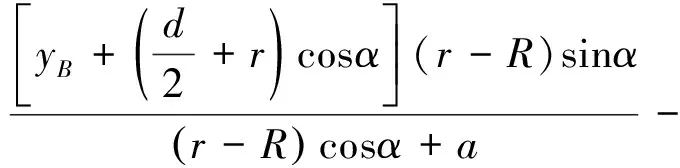
点B为张紧轮的轮心点,点G为张紧轮与V带刚接触时的切点,以O点为坐标圆心点,OA为y轴,建立坐标系Oxy。建立张紧轮刚与V带接触时的模型,如图5所示。

图5 张紧轮刚与V带接触时的模型Fig.5 Model of the tension wheel just in contact with the V-belt
设张紧轮轮心B坐标为(xB,yB),张紧轮与V带的切点G的坐标为(xG,yG),直线BG与x轴的夹角为θ,张紧轮直径为d,则:
(9)
式(9)中,yB是设计量,为张紧轮的设计高度。
θ=π/2-α
(10)
根据圆的方程可以得到点F和H的坐标点方程
(11)
(12)
yA=a
(13)
则直线FH的方程为
(14)
将切点G代入式(14)中,可得:
(15)
根据式(15)可得张紧轮初始坐标点(xB,yB),进而通过式(9)可得张紧轮与V带之间的切点坐标(xG,yG)。
2.3 张紧轮工作过程
在张紧轮逐渐压紧V带的过程中,假设张紧轮和V带之间没有相对滑动,张紧轮无竖直方向位移,则G点相对于张紧轮是不变的,直线BG与x轴的夹角不变。V带会在张紧轮以及大小带轮槽内逐渐形成包络线。
建立张紧轮压紧过程中V带基线长度模型,如图6所示。直线AB和OB为辅助线,直线FH为无张紧轮状态下的带长。张紧轮逐渐压紧V带的过程中,直线DE、圆弧EF和圆弧DH的长度保持不变,直线FH被拉长,分为圆弧FP、直线PQ、圆弧QM、直线MN、圆弧NH。因此,当增加张紧轮以后,V带基线长度由原来的直线DE、圆弧EF、直线FH、圆弧HD长度的总和,变为直线DE、圆弧EF、圆弧FP、直线PQ、圆弧GQ、圆弧GM、直线MN、圆弧HN、圆弧HD长度的总和。
图6 张紧轮压紧过程中V带基线长度模型Fig.6 V-belt baseline length model in the process of tensioning
首先,计算直线PQ的长度。
直线AB的方程为
(16)
直线AB的长度为
(17)
因为,△BQK相似于△APK,可得直线AK的长度为
(18)
则:
(19)
可得直线PQ的长度为
(20)
同理,可计算直线MN的长度。
直线OB的方程为
(21)
直线OB的长度为
(22)
因为,△BLM相似于△ONL,所以直线OL的长度为
(23)
则:

(24)
直线MN的长度为
(25)
最后计算各段圆弧的长度。
由于直线BG平行于AF且直线BQ平行于AP,所以∠GBQ=∠FAP,同理,∠GBM=∠NOH。
(26)
(27)
根据式(4)、式(19)、式(24)、式(26)、式(27),可得各段圆弧得长度。
弧长FP的长度为

(28)
弧长QG的长度为
(29)
弧长HN的长度为
(30)
弧长QG的长度为
(31)
根据式(5)~式(7)、式(20)、式(25)、式(28)~式(31),可得张紧轮逐渐压紧V带过程中,V带得基线长度公式:

(32)
V带张紧的判断条件为:在有张紧轮状态下得到的V带基线长度,大于等于规定的基线长度,此时V带具有一定的张紧力T。即:
LDEFH≥L
(33)
式(33)中:L为V带达到理想张紧状态时的基线长度,mm。
3 MATLAB仿真
根据式(32),可得V带基线长度与张紧轮工作行程之间的关系曲线。V带基线长度公式中包含6个参数(5个设计参数和1个因变量)。因此,可用函数的形式表示为
LDEFH=f(R,r,a,d,yB,s)
(34)
式(34)中:s为张紧轮的工作行程,取值范围为0~150 mm。
在式(35)的状态下,可得V带基线长度与张紧轮工作行程的关系曲线,如图7所示。
LDEFH=f(132.5 mm,66 mm,373 mm,118 mm,120 mm,s)
(35)
图7 V带基线长度与张紧轮工作行程的曲线Fig.7 Curve between V-belt baseline length and working stroke of tension wheel
为研究V带张紧过程中,设计参数对V带基线长度的影响,优化设计,通过改变不同的设计参数,对V带基线长度与张紧轮工作行程的关系曲线进行对比,如图8所示。中心距373 mm所代表的曲线为式(35)所设定的基准状态。
通过对图8中不同曲线的对比可得以下结果。
(1)V带基线长度随张紧轮水平位移的增加而增加。
(2)带轮直径和中心距增大,会使V带基线长度增加,但其变化量比初始状态有所减小。
(3)张紧轮竖直高度的增加,对V带基线长度变化量的影响很小。
(4)张紧轮直径的增大,使V带基线长度的变化量略有增加,但影响很小。

图8 不同设计参数下V带基线长度与张紧轮工作行程的曲线Fig.8 Curve between V-belt baseline length and working stroke of tension wheel under different paraneters
4 结论
通过对V带传动张紧机构的分析,建立了V带基线长度与张紧机构工作行程的参数化模型。最后,用MATLAB软件对模型进行了仿真分析,结果表明V带的张紧程度主要随张紧轮行程的增加而增大,而带轮组件设计因素对其影响很小,带轮组件的设计因素应主要依据设计需求来确定。
通过本文分析,提出了带轮组件张紧机构的设计原则和方法,建立了张紧结构的参数化模型,并为无人直升机在线监测功能的实现提供了理论依据。