全站仪自由设站法在建筑基坑监测中的应用条件研究
2020-04-15刘洪臣孙愿平
刘洪臣 孙愿平 陈 磊
(中兵勘察设计研究院有限公司,北京 100053)
0 引言
在基坑变形监测诸多项目中,水平位移监测是基坑监测工作的必测项目和重点内容。随着城市建设和建筑基坑施工工艺的发展,建筑基坑形式不再局限于简单的矩形方式,基坑周边环境也更加复杂[1]。因此,视准线法、测小角法等常规水平位移监测方法的实施条件受到很大限制,难以满足规范对水平位移监测精度的要求(0.3~3.0 mm)[2]。
全站仪自由设站法不仅能够克服基坑施工环境对通视条件的限制,而且能够提高监测精度和工作效率,因此在城市基坑水平位移监测中的应用越来越广泛。但是,该方法的应用不能生搬硬套,需要根据现场条件和精度要求确定合理方案,才能获得最佳的监测效果。本文全面分析了影响监测精度的各种因素及其对监测精度的影响规律,系统地总结了在深基坑水平位移监测工作中合理、有效使用自由设站法的思路和方法。
1 全站仪自由设站法工作原理
所谓全站仪自由设站法[3],其实质是边角后方交会测量,如图1。

图1 自由设站法监测示意图
根据现场条件选择基坑附近方便观测的任意位置作为测站架设全站仪,观测与其通视的基准点和变形点的方向值及距离值,只要每测站联测两个以上的基准点,经过平差计算,便可得到测站点和变形点的坐标值;通过计算变形点不同期次的坐标变化量,直接反映基坑水平位移变形情况。
由上述原理可知,自由设站法的基本观测量为测站至各基准点的水平方向和水平距离。确定测站点坐标的必要条件有3个:两个方向值和一条边长。即在任意测站只要联测至少两个控制点,就可以采用间接平差方法[4]列出误差方程式[5]计算出测站点的坐标和点位精度。
假设A、B为两个基准点,如图2所示,在任意测站点(P10,P20,……),以相同的观测精度进行方向和距离观测,平差计算各测站点点位精度并以误差椭圆表示,结果表明各测站点点位精度随着测站位置不同而发生了明显变化。因此,在采用自由设站法进行变形监测时,测站点点位精度随着测站位置的变化而变化并影响监测精度,必须对测站点精度进行评定和控制,以保证监测结果满足相应精度要求。

图2 点位误差椭圆示意图
2 观测精度的影响
距离值和方向值是自由设站法的基本观测量,测角误差和测距误差协同决定观测精度。为了直观分析,仍以图2为例,令已知点A、B距离为500 m,分别以常用的全站仪标称精度“1″&1+1 ppm;2″&2+2 ppm;5″&5+5 ppm”为观测精度先验值进行平差计算,通过各测站点点位误差曲线(见图3)可以看出:
(1)测站点点位误差与观测精度成正比,即测角、测距精度越高,测站点的点位误差越小。
(2)在测角、测距精度一定的情况下,测站点距离已知点越远,点位误差越大。
(3)在交会角γ相同的情况下,交会边a、b之和越短精度越高,当交汇点处于已知点连线的中垂线上时,两条交会边相等且边长之和最大,点位误差最大。
(4)观测精度为“5″&5+5 ppm”时,各测站点点位误差在5~10 mm之间,超出了规范规定。所以,在基坑变形监测工作中,不建议使用5秒级以下精度的全站仪。

图3 观测精度对测站点点位精度的影响曲线图
3 交会角大小的影响
为了便于研究,选取上例中位于已知点连线中垂线上的一组测站点(P1~P14),见图4,令A、B距离为500 m,分别以“0.5″&1+1 ppm;1″&1+0.6 ppm;1″&1+1 ppm;2″&2+2 ppm”为观测精度,各测站点点位误差椭圆及误差曲线见图4、图5。
根据计算结果可以总结出以下规律:
(1)交会角越小,点位误差越大,且交会角对横轴误差的影响大于对纵向误差影响(见图4)。由于基坑水平位移监测关注的变形量具有单方向性(垂直于基坑边线方向),因此,在使用自由设站法时应考虑误差椭圆的均衡性,合理设置交会图形。
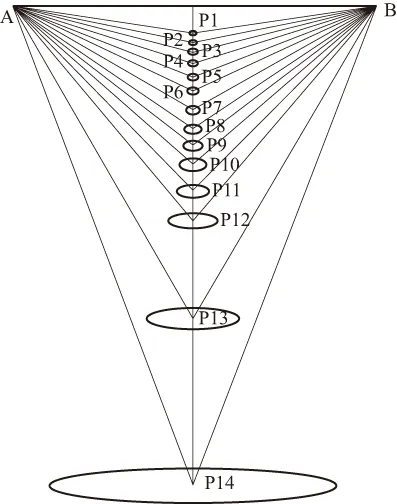
图4 误差椭圆示意图
(2)当测距、测角精度一定时,交会角在120°至180°范围内变化时,误差曲线接近直线,各测站的点位误差变化量均小于0.5 mm;当交会角小于45°时,曲线陡然上升,说明点位误差受角度变化影响十分显著(见图5)。因此,采用两点交会时,应避免交会角小于45°,尽量使监测精度相对稳定。
(3)由图5第②、③条曲线可以看出,测角精度由1″提高到0.5″,对测站点精度的提高并不明显,第③、④条曲线说明,当测距精度的固定误差由1 mm提高至0.6 mm时,点位误差的精度提高比较明显,说明在自由设站法中,提高测距精度比提高测角精度更加有效。
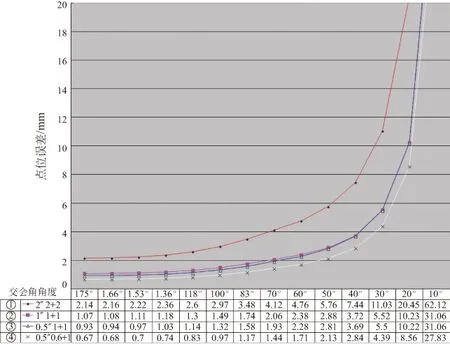
图5 点位误差曲线图
4 边长长短的影响
为了突出边长对测站点精度的影响,本算例选取交会角均为90°的一组测站点,见图6,A、B为一系列基准点,P为相应测站点,交会边长PA、PB的长度相等,最小边长100 m,最大边长3000 m。分别以“2″&2+2 ppm;1″&1+1 ppm;0.5″&1+1 ppm;0.5″&1+0.6 ppm” 四组不同的精度进行计算,其点位误差曲线见图7。结果表明:
(1)边长与点位误差的大小呈线性关系,即边长越长,点位误差越大。
(2)当边长小于700 m时,固定误差对测距精度的影响起主导作用,并受测角精度的影响。边长大于700 m时,比例误差起主导作用且与边长成正比;所以在实际应用中,将边长控制在700 m以内有利于监测精度的提高。

图6 点位误差椭圆示意图
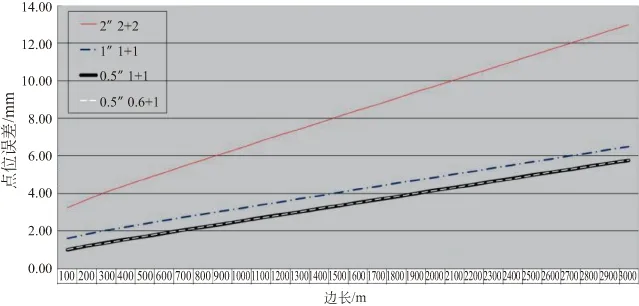
图7 点位误差曲线图
(3)当观测精度为“2″&2+2ppm”时,只有边长小于100 m,才能将点位误差控制在±3 mm以内,即规范允许的最大范围。当使用目前最先进的全站仪精度指标为观测精度,即观测精度为“0.5″&0.6 mm+1 ppm”时,也只有边长小于1000 m时,才能将点位精度控制在±3 mm以内。所以在基坑变形监测工作中,尽量采用两点以上的交会图形。如果受现场条件限制只能采用两点交会,建议使用1″级以上高精度全站仪。
5 控制点数量的影响
为了便于研究,首先在上述两点交会的基本条件下增加一个已知点,对两个交会图形同等观测精度下的点位误差进行对比(见图8)。从误差椭圆的变化可以看出,增加观测方向后点位精度显著提高,测站点越接近三个控制点的中心,其点位误差越小,并且长、短轴误差趋于均衡。
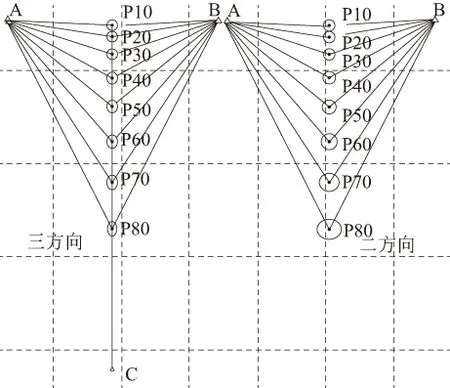
图8 点位误差椭圆对比图
分别对上述四种观测精度下,增加控制点前后的各测站点点位误差进行对比(见图9),图中虚线分别代表两点交会条件下的点位误差,实线代表三点交会条件下的点位误差。
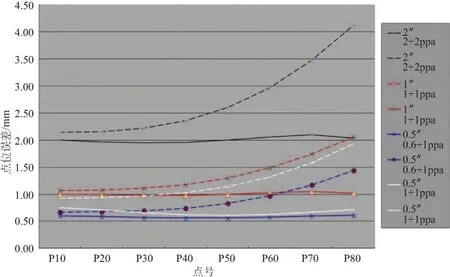
图9 点位误差曲线对比图
数据表明,在两点交会条件下,测站位置变化对点位精度的影响较大;增加一个控制点后,测站位置的变化对测站精度的影响明显减小。所以,在自由设站法中,增加交会方向能够削弱测站点位置变化对精度的影响,自由选择测站点位置的范围更大。
上述分析说明,增加交会方向显著提高了观测精度和测站设置的灵活性,但交会方向过多势必增加工作量,所以在满足工程精度要求的前提下,确定合适的交会方向,是采用自由设站法要解决的重要问题。如图10所示,A1、A2……An为控制点,P为测站点,令最大交会边长不大于700 m,以上述四种观测精度分别计算2~10个交汇方向情况下测站点的点位误差,误差曲线如图11所示。

图10 多方向交会示意图
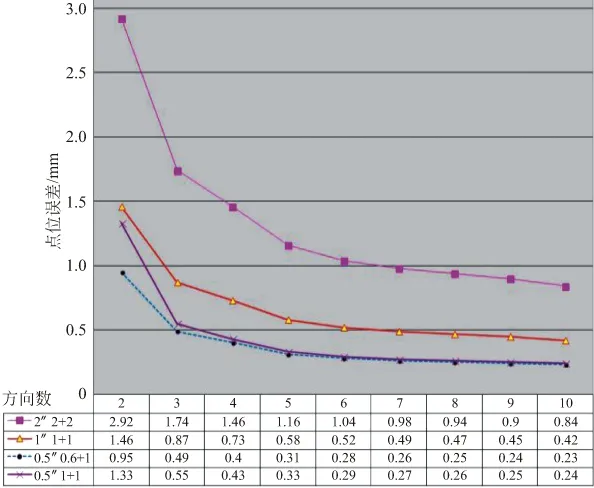
图11 多方向交会点位误差曲线图
通过计算数据对比分析可得出以下结论:
(1)在控制点为2~7个时,随着交会方向的增加,四种观测精度下的点位精度明显提高;当交会方向超过7个后,四种观测条件下的点位精度提高幅度均不超过0.1 mm,说明在采用自由设站法进行变形监测时,控制点的设置超过7个已对提高精度意义不大了。
(2)在以上四种观测精度下,两点交会、三点交会均能满足基坑监测规范最大精度限差(±3 mm)的要求。综合考虑控制点的稳定性、观测精度的均衡性及现场通视条件等因素,建议交会方向数量控制在4~6个。
6 结论
通过对影响测量精度的各种因素的分析,可以总结出自由设站法在基坑变形监测中的应用原则:
(1)图形强度优先原则
控制点数量、边长、交会角是构成交会图形强度的三大要素,三种要素共同作用影响着观测精度。通过设计合理的交会图形来提高监测精度在实际应用中是一劳永逸的,应作为首要考虑因素。
(2)先进设备优先原则
采用先进的设备提高测角、测距精度远比通过增加观测量提高精度有效,尤其带有自动观测功能的智能全站仪,在变形测量中更具有无法比拟的优势。
(3)等角等边原则
尽量使基准点位于以交会点为圆心的圆周上,既有利于提高精度,又有利于纵、横坐标误差的均衡和一致。
(4)多方向原则
在两点交会图形中,交会点位置的变化对点位精度影响太大,在变形监测中不宜采用。交会方向以4~6个为宜。
(5)短边原则
在保证控制点能够控制测区的前提下,尽量选择较短的交会边长以减弱测距比例误差的作用,一般控制在700 m为宜。
(6)精度估算原则
拟定交会图形后,应对监测精度进行估算,如果估算精度不能满足变形监测精度要求,则通过选择高精度设备、调整交会图形强度、增加测回数等措施,直至估算的精度达到要求后再实施。作业流程见图12。

图12 作业流程图
