50mm~1 000mm大变倍比变焦光学系统设计
2020-04-12
(中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
引言
机场跑道外来物(FOD,foreign object debris)泛指可能危害航空器或系统的某种外来物质,如飞机和发动机连接件、机械工具、飞行物等[1]。机场跑道外来物一直以来都是危害飞机飞行安全的重要因素之一,通过在跑道周边部署FOD 光电探测系统,对跑道路面不同距离、不同大小外来物进行实时监控,快速精确地检测与告警成为保障飞机飞行安全的重要措施。作为光电探测系统的“眼睛”,变焦镜头起着至关重要的作用。变焦镜头是指在像面保持不变的前提下,通过改变系统2个或2个以上透镜组之间间隔实现焦距连续变化,达到小倍率、大视场发现物体,大倍率、小视场识别物体的目的。针对机场跑道外来物光电探测系统远距离(≤500 m)识别微小物体(尺寸≥20mm×20mm)的特殊需要,研制高像质、长焦距、大变倍比以及小型化的变焦镜头显得尤为重要。
2007年,华中光电研究所的胡际先[2]设计了一款75 mm~900mm 连续变焦系统,系统总长小于1 000mm,通光口径140mm,该光学系统结构合理,各透镜的加工工艺性能良好,并通过了像质测试、环境试验及实景成像试验。2009年,胡际先等人[3]又设计了一款连续透雾变焦系统,该系统焦距为20mm~400mm,系统总长不大于280mm,实现了普通彩色和透雾黑白两种模式的观察,保证了系统的齐焦性,并针对系统小型化做了详细的研究。2015年,姚清华等人[4]设计了一款焦距为10mm~500mm的大变倍比长焦距变焦镜头,该系统采用2个新型非球面和一组双层衍射元件,有效地校正了光学系统的像差。2018年,白虎冰等人[5]通过Zemax 软件仿真设计了一款变焦范围为100mm~600mm的光学变焦系统,整个变焦系统采用球面镜片,口径为135.56 mm,总长为563.956 mm,实现了远距离成像的应用要求。随着变焦镜头焦距以及变倍比的不断增大,系统的色差校正成为一个亟需解决的难题[6-7]。为了获得高像质、大变倍、长焦距的变焦系统,本文采用机械补偿方式实现连续变焦,通过合理分配光焦度,引入多片超低色散(extra-low dispersion,ED)镜片,利用其独特的超低色散特性,有效地校正了系统色差和其他高级像差[8],并通过Zemax 光学设计软件进行了像质优化,提高了成像质量。
1 系统参数及设计原理
1.1 设计参数
根据中国民用航空局机场司《机场道面外来物探测设备》信息通告要求,结合现有成熟技术,同时为了适应不同照度,拟选用200 万像素Sony 逐行扫描1/1.8″CMOS 芯片,靶面尺寸为7.76 mm×4.36 mm,对角线长度为9.0mm,摄像机像元尺寸为3.45 μm。根据该类摄像机像元尺寸,选用镜头焦距满足如下公式:

式中:f为镜头焦距;R为作用距离,取500 m;d为摄像机像元尺寸,取3.45 μm;n为探测目标所需像元个数;a为目标尺寸,取20mm。视场满足如下公式:

式中:θ为视场角;l为相机像面对角线长度;f为镜头焦距。相应技术参数如表1所示。

表1 光学设计参数Table1 Optical design parameters
1.2 设计过程
变焦镜头根据其补偿方式不同,主要分为光学补偿变焦镜头、机械补偿变焦镜头、双组联动变焦光学镜头和全动型变焦光学镜头。其中,机械补偿变焦镜头因为其结构简单、成像质量好且容易实现较大的变倍比与较小的像面漂移被广泛采用[9]。机械补偿变焦光学镜头主要由前固定组φ1、变倍组φ2、补偿组φ3和后固定组φ4组成,如图1所示。变倍组φ2 与补偿组φ3 各自按照不同的运动曲线移动,从而实现焦距连续变化。目前,变焦系统的结构设计方法主要有两种:一种是近轴高斯光学理论计算法,此法计算复杂,错误率高,容易产生无效解,一般应用于结构较为简单的变焦系统中[5];另外一种是光学设计软件(Zemax、Code V、OSLO 等)辅助计算法,此法通过查找专利、文献进行等比缩放,再配合评价函数操作数进行仿真优化得到最终结果,一般用于较为复杂的结构设计中。
本文采用机械变焦结构,通过查阅相关文献以及相关专利[9-11]确认初始结构。根据设计要求,对初始结构各组分进行归一化处理,合理分配各组分的焦距和间隔,然后通过软件中相关操作数进行优化设计。在大变倍、长焦距变焦镜头优化设计过程中,色差校正是需要着重考虑的环节之一。根据消色差理论,整个系统应满足:

超低色散镜片具有高折射率、高阿贝尔系数,其独特的色散特性可以有效解决系统色散问题。而双胶合镜组不仅可以减少系统镜组数量,简化整体结构,而且有利于校正球差和色差。本文通过采用双胶合结构与超低色散镜片搭配来实现系统色差校正[8,12]。在长焦状态,前固定组是色差的主要来源,通过采用单片ED 镜片FCD100 以及胶合镜组(TAFD5G+FCD100)搭配来进行色差优化。其中,选用阿贝尔系数相差较大的两种材料TAFD5G(Nd:1.8348,Vd:42.721)与FCD100(Nd:1.437,Vd:95.1)来进行胶合,不仅减小了前固定组的色差贡献,又避免了镜组光焦度过大导致入射角偏折而增加的高级球差[13]。与此同时,为了平衡变焦状态的色差分布,在补偿组中引入ED 镜片FCD100 进行短焦状态色差校正。最后通过优化操作数加以约束,调整各个透镜的曲率以及镜组间隔来改变光线的偏折角,从而减小系统的色差贡献。
2 设计结果及像质评价
2.1 设计结果
本文采用机械变焦结构设计了一款大变倍比、长焦距、高像质的变焦镜头。该系统对可见光波段成像,焦距变化范围50mm~1 000mm,20倍变焦,系统结构如图2所示。图2从上到下分别为短焦(50mm)、中焦(300mm、500mm)、长焦(1 000mm)4种状态下外形结构图。由图2可知,系统共有28片透镜组成,总长399.9 mm,最大口径为100mm,后截距22 mm。其中,前固定组由5片球面透镜组成,为正光焦度,其主要作用是为系统提供相应的工作距以及平衡像差,减轻后固定组校正压力。变倍组由6片球面透镜组成,为负光焦度,通过移动位置来实现变焦系统倍率的改变。补偿组由4片球面透镜组成,为正光焦度,按照一定的曲线规律做非线性运动来补偿变倍组移动所引起的像面变化。后固定组由13片球面透镜组成,为正光焦度,主要采用由冕牌玻璃与火石玻璃搭配的双胶合以及三胶合透镜的结构形式来进行残余像差的矫正。

图2 变焦镜头结构图Fig.2 Structure diagram of zoom lens
2.2 像质评价
2.2.1 传递函数
调制传递函数(modulation transfer function,MTF)是所有光学系统性能判据中最全面的判据,特别是对于成像系统而言,它反映了光学系统对物体不同频率成分的传递能力。利用Zemax 设计软件可以得到变焦镜头在短焦(50mm)、中焦(300mm、500mm)、长焦(1 000mm)4种状态下MTF曲线,如图3所示。由图3可知,系统在各个焦距位置均呈现良好的成像质量,在20 lp/mm 空间频率时MTF>0.8,50 lp/mm空间频率时MTF>0.5,100 lp/mm 空间频率下MTF>0.2,均逼近衍射极限。由此可知,物体在成像中信息传递损失少,有利于机场跑道微小外来物的探测识别。
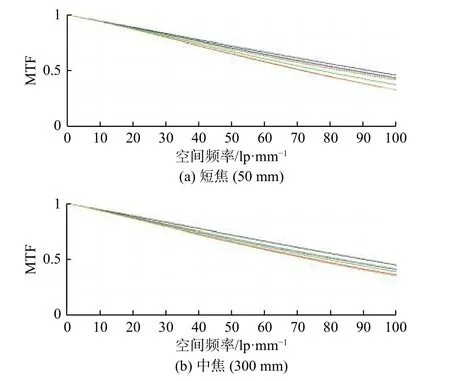

图3 各组态下调制传递函数Fig.3 MTF of each configuration
2.2.2 点列图
弥散斑半径是一个重要的成像质量参数,其斑点半径越小,系统成像质量越好,各组态下弥散斑直径如表2所示。从表2中数据可知,整个光学系统的RMS 弥散斑半径在中心视场下各个焦距位置处均小于4 μm,整个光学系统的GEO 弥散斑半径在中心视场下各个位置处均小于7 μm,可以看出整个系统在各焦距位置都有比较好的成像质量。

表2 各组态下弥散斑半径Table2 Dispersed spots diameter of each configuration
2.2.3 畸变、场曲图
系统畸变、场曲曲线如图4所示。图4(a)~4(d)分别表示系统在短焦(50mm)、中焦(300mm、500mm)、长焦(1 000mm)4种状态下的畸变、场曲情况。由图4可看出,当系统焦距为50mm时,系统处于广角状态,全视场为20°,畸变相对较大,接近1.0%;当系统处于中焦和长焦位置时,系统畸变均小于0.1%。与此同时,通过场曲曲线我们发现,无论系统处于短焦、中焦还是长焦状态下,系统场曲均小于0.1 mm,均满足系统对变焦镜头成像的要求。

图4 各组态下场曲与畸变图Fig.4 Field curvature and distortion of each configuration
2.2.4 色差曲线
系统在长焦(1 000mm)状态下垂轴色差以及轴向像差如图5所示。由图5可看出,由F(0.65 mm)光、C(0.48 mm)光在轴上差异可知,系统在长焦状态下位置色差均在0.2 mm范围内,垂轴色差全视场均在艾里斑内,且垂轴色差最大值在2.5 μm 内,保证了长焦状态下的成像质量,满足系统对变焦镜头成像的要求。

图5 长焦(1 000mm)状态下垂轴色差与轴向像差图Fig.5 Vertical axis color difference and axial aberration at long focus (1 000mm)
2.2.5 变焦补偿曲线
机械补偿的变焦系统需要绘制凸轮曲线,以此来检查变倍组和补偿组运动过程的合理性[10]。通过基于光线追迹法的Zemax 宏命令[11],计算出系统变焦过程中变倍组与补偿组的位移量,运用MATLAB 软件进行编程,代入初始参数,求得变焦系统变倍组与补偿组的运动变化曲线,如图6所示。图6中横坐标表示凸轮转动的角度,纵坐标表示随凸轮转角变化时变倍组和补偿组相对于像面的距离,其中光阑到像面的距离为零。变倍组随凸轮转角作线性运动,使系统焦距发生变化,补偿组作非线性运动,补偿变焦过程中像面移动,变倍组和补偿组的导程分别为55.48 mm和59.69 mm,变焦曲线平滑无断点,有利于凸轮加工。

图6 变倍补偿曲线Fig.6 Zoom compensation curves
3 结论
根据中国民用航空局机场司《机场道面外来物探测设备》信息通告,通过选取合理的初始结构,计算光学参数,采用Zemax 光学设计软件对变焦系统进行像质优化,在设计过程中利用超低色散镜片解决了长焦镜头色差难以纠正的问题,通过优化镜片间距以及镜片厚度较好地解决了现有国产大变倍、长焦距变焦镜头无法小型化的问题。经过优化设计的变焦镜头具有较好的成像质量,MTF 接近衍射极限,此外,通过研究变焦理论与变焦运动方程,运用MATLAB 软件绘制了变倍组与补偿组的运动曲线,证明了变焦运动过程的合理性。该设计也为下一步机场跑道外来物光电探测系统的研发设计提供了铺垫,为其他变焦镜头设计提供了依据。
