多维特征点空间的红外弱小目标检测方法
2020-04-12
(空军工程大学 航空工程学院,陕西 西安 710038)
引言
随着第四代战机隐身能力的提高,雷达对空中目标的探测能力大幅度下降,红外技术凭着其隐蔽性好、抗干扰能力强、测角精度高等优势在目标探测中的优势日益凸显。然而在空中目标高机动的状态下,红外单光谱波段的探测概率偏低[1-2],已经不能满足空中目标的探测需求,多波段探测技术成为解决此问题的一个研究热点。
传统对于红外弱小目标的探测,采用设置阈值的方法,将高于阈值的信号判断为目标,低于阈值的信号判断为背景[3],在已知光谱噪声分布的情况下,这种方式有很好的探测概率,但随着现代战场复杂的作战环境和目标机动样式的灵活多变,光谱的噪声分布变得很难判定,在这种情况下,传统的探测方式探测效果急剧下降[4]。随着人工智能的兴起,许多学者将空中弱小目标的探测归为模糊识别中的二分类问题。南加州大学Irving S.Reed和Yu 提出的RX 异常检测方法[5]及西安现代控制技术研究所张翔等人对其改进的算法[6],对于均匀背景检测性能较好,但均匀背景的情况太理想,工程应用价值不高。李伟、He 等人提出的基于稀疏和协同表示的弱小目标检测算法[7-8],属于监督分类范畴,通过最小化L1范数来求解目标的稀疏性,但此方法不适用于复杂光谱信号检测;高陈强、Sun 等人提出基于核函数的高维特征空间检测方法[9-10],通过核函数将目标投影到高维特征空间,最终通过背景和目标的残差确定像素类型。本文在前人研究的基础上,充分研究了弱小目标红外信号多光谱特性,建立了空中弱小目标多维特征空间,并结合最小二乘分类方法对电压比光谱信号分类,通过优化最小二乘算法,从光谱层级上实现了红外弱小目标的检测。
1 复杂背景下红外弱小目标光谱特性分析
1.1 红外弱小目标探测模型
如图1所示,建立空中红外弱小目标的探测过程[11]。

图1 空中弱小目标探测示意图Fig.1 Schematic of dim target detection
图中:下标“B”代表背景,下标“T”代表目标;αs反映目标机头偏离y轴的角度,称为目标姿态角;α表示背景平面法向与两者连线的夹角,称为目标相对探测器的方位角。当背景中不存在目标时,红外系统接收的背景辐射有效功率为PB=为光学系统法向与两者连线的夹角,ω1为光学系统所在方向的空间立体角,kB为红外系统对背景辐射功率的利用系数,依据红外作用距离公式[12]可得出探测器输出的电压信号值为

式中:D*max为探测器的最大比探测率;LB为背景总辐射亮度;AB为背景面积;Ao为红外光学系统等效面积;Ad为探测器面积;∆f为系统等效带宽;R为系统探测距离;VN为系统噪声。
当目标在背景中央时,如图1所示的灰色阴影部分,由于遮挡,背景实际输出的有效辐射功率为P=LBAocosαo(ωB−ωT)kB,其中 ωB为系统视场角,当系统视场角ωB不太大时,为目标对系统入瞳中心所张的立体角,目标输出的有效辐射功率为PT=LTAoωTkT。由于红外系统探测目标是借助于差值,所以系统接收存在目标时的辐射功率为∆P=P+PT−PB,则探测器输出的电压信号值为

式中:LT为目标的辐射亮度:AT为目标面积:kT为红外系统对目标辐射功率的利用系数。(1)式、(2)式相比并在光谱波段 λ1~λ2上积分,可得到有无目标存在时探测器输出电压信号比公式(V在下文中简称为电压比):

1.2 红外弱小目标光谱特性分析
假设背景温度分别为TB=[290 K 390 K 490 K 1 000 K],目标温度为TT=340 K,波段选为中波段λ=(3 ~5)μ m,设kB=kT=1。图2仿真了探测器输出目标与背景的电压信号,对比图2(a)~图2(d),可以看出目标信号很快淹没在背景信号中,难以辨认。
图3基于(3)式仿真了电压比变化情况,可看出不论目标温度是否高于背景温度,电压比都会有明显的变化。图3(a)中,背景温度低于目标温度TB

图2 不同背景温度下电压信号Fig.2 Voltage signal at different background temperatures

图3 不同背景温度下电压信号比值Fig.3 Voltage signal ratio at different background temperatures
依据黑体辐射定律[13],(3)式中目标的红外辐射亮度又可进一步写为

式中:c1为第一辐射常量(c1=3.741 5×108W·μm4·m−2);c2为第二辐射常量(c2=1.438×104μm·K);λ代表波长;T代表目标温度,工程计算中采用简化公式[14]:

式中:T0为周围大气温度;r为恢复系数;γ为质量热容比;VT和V0分别表示目标速度和当地音速。联立(3)、(4)、(5)式,可以看出电压比与目标速度(VT)、目标姿态角(αs)以及两机方位角(α)都有关系。
图4仿真了不同速度条件下,两机方位角α=45◦时,目标辐射强度的光谱分布情况。可以看出,不同的目标速度对应的最佳探测波段不同,且随着速度的增大,峰值波长向短波方向移动,与物体的热辐射规律相吻合。

图4 目标不同速度的辐射强度光谱分布Fig.4 Spectral distribution of radiation intensity at different target velocities
图5以目标机为中心,仿真了其不同速度下,目标姿态角αs=0 ~2π时,不同探测波段条件下的电压比分布情况。图5(a)中VT=289 m/s,对应的峰值波长在长波段,长波段的电压比在各个方向最大,并且其前向信号包络小于后向;图5(b)中VT=680 m/s,与图5(a)相比,随着速度的增大,全波段的电压比都增大,但从仿真图中看出,6 μm~8 μm 波段电压比最强,说明其增大的幅度要大于其他波段,图5(c)中VT=1 020 m/s,目标在短波段的电压比最大,说明短波段为最佳的探测波段,且前、后向信号包络差距要大于图5(a)。

图5 载机全向探测的光谱信号强度Fig.5 Spectral signal intensity of aircraft omnidirectional detection
表1给出图5(a)、5(b)、5(c)3种情况下,电压比最大的目标姿态角处,采用不同光谱探测获得的电压比。说明目标在战术机动时,靠单光谱波段探测,容易出现信号闪烁、目标丢失现象。进一步考虑载机的探测距离与电压比关系,说明靠单光谱波段探测,载机的探测距离容易受到限制。

表1 最大探测方位角对应的电压比值Table1 Voltage ratio corresponding to maximum detection azimuth
2 多维特征弱小目标检测方法
2.1 双色比特征空间模型建立
通过上述分析得知,探测弱小目标光谱信号随着目标飞行速度、目标机姿态、两机探测方位等动态变化,与传统空间检测理论中研究的静态特征空间有区别,采用动态特征空间构建理论建立空中弱小目标的双色比动态特征空间。
构建随时间变化的一组模式Ri={Ki},i=1,2,···,k,其每一模式的特征Ki由j个向量组成,j为采样点个数,表示为

每一特征向量Wj由三元素组成,表示为

其中Ss、Sm、Sl分别表示特征向量j的短波、中波、长波光谱信号。进一步定义双色比特征向量为
式中:I(λ)表示特征向量j的辐射强度;D*(λ)表示探测器的比探测率;τo、τα分别表示光学系统透过率和大气透过率。对于多光谱探测系统其光学系统对于1 μm~3 μm、3 μm~5 μm、8 μm~14 μm 三个波段透过率很高,而这三个波段处于大气窗口波段,大气透过率也很高,故(8)式特征向量数值大小主要反映了目标姿态以及探测方位角,因此可以用双色比特征向量检测空中目标。建立探测过程双色比特征子空间:
式中:k表示其模式数;n代表特征向量总数;其每一个特征向量Wij(t)={XWj(t),YWj(t)}。
2.2 最小二乘分类算法优化
为了克服传统最小二乘分类算法“过拟合”问题,对最小二乘分类法进行优化,通过剔除错分类样本点的方法,在选用相同高斯核参数的情况下,很好地防止了分类函数“过拟合”现象。建立多光谱特征集为

其中yn∈{−1,+1},−1表示此信号为背景,+1表示此信号为目标。Wi用双色比特征空间表示,即Wi=具体分类步骤如1)~4)。
1)收集训练样本数据

式中:i表示采集的不同时刻;KBi表示背景特征点,总量为n,每个点均用长、中、短三维数据表示;KTi表示目标特征点,总量为n,每个点亦均用长、中、短三维数据表示,训练样本的总数据为2n。
2)数据预处理
a)把训练样本随机划分为2个集合 {Γx,Γc},一部分为训练样本 {Γx},一部分为测试样本 {Γc},两样本大小相同;
b)对训练样本 {Γx}进行初始化判断,分别计算背景和目标样本集合的平均值点以两平均值点连线的中垂线作为分类超平面的近似,如图6所示。计算样本点到超平面的距离R,根据目标产生的信噪比往往大于背景产生信噪比的特点,说明那些距离满足R>L+ε(L=0.5×d())的样本点对分类界限的贡献度较小,可以看作冗余样本剔除,从而缩小样本数据量,ε为允许的误差值。缩小后的样本集合设为{Γx1}。
3)构建核函数

图6 样本筛选策略示意图Fig.6 Schematic of sample screening strategy
b)基于经验选择 (h,λ)偏小的组合,λ为正则化参数。循环计算当DTi>L,判断这点为目标集中异常点,剔除;同理计算DBi=‖fBi(xBi)−PB¯‖,当DBi>L,判断这点为背景集中异常点,剔除;
c)用剔除后的样本集,依据经验选择 (hj,λj)的不同组合,对测试样本集合 {Γc}进行误差评估
4)给出最终的分类器

3 实验结果与分析
假定载机对目标进行侧向探测,由多光谱信号模型产生数据点1000个,并将其分为10组,则每组数据{k1,k2,···,k100},其中为双色比光谱信号,干扰噪声其中µ1=µ2=0。
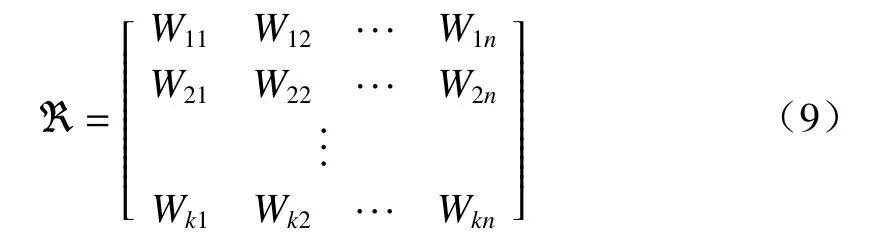
图7给出了剔除异常点后的样本数据集。原样本集中黑色圆圈标记出的2个点为异常点,被剔除。
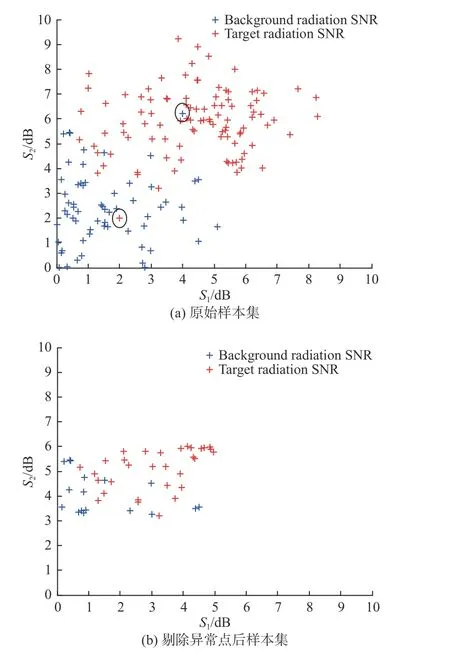
图7 样本集Fig.7 Sample set
图8给出 σ1=σ2=1.5时各分类算法对样本数据的分类结果。从图中可看出,弱学习器中的剪枝分类器(Pruning)[15]由于其自由度差,导致分类效果最差;Bagging分类算法[16]由于其将不同的弱分类器组合,所以分类结果较剪枝分类器好,但却不稳定,在实际应用中容易提高虚警率;最小二乘分类算法(LSSVM)[17]应用最小二乘原理,将分类问题归结为一个线性系统中带有等式约束的求误差平方和的最优化问题,其分类效果较好,但从图中也可以看出,一旦高斯核函数带宽参数h选择过小,容易出现过拟合现象。优化的最小二乘分类算法(PLSSVM)在同样大小带宽参数条件下,能够克服过拟合现象,分类效果优于其他算法,满足实际情况需求。用虚警率 (P)[11]和漏警率(P)[11]表示分类的正确率表2给出了4种分类方法分类正确率的对比。
进一步分析算法分类误判率随迭代次数的变化情况,图9仿真中可以看出剪枝和Bagging 误差没有明显的收敛趋势,但Bagging的误判值要小于剪枝算法,最小二乘分类算法在迭代次数N>100次后,基本趋于稳定,并且误判率几乎趋于零值,优化的最小二乘分类法随着迭代次数的增加很快趋于零,主要归因于算法对样本数据的缩减,以及引起“过拟合”点的剔除。

图8 不同分类器对训练数据的学习结果Fig.8 Learning results of training data by different classifiers

表2 4种方法分类正确率对比Table2 Comparison of classification accuracy rate of four methods
图9 不同分类器误判率随迭代次数变化Fig.9 Error rate of different classifiers varies with number of iterations

图10 不同分类器误判率随噪声强度变化Fig.10 Error rate of different classifiers varies with noise intensity
图10探讨了光谱信号噪声强度对各种算法分类效果的影响,通过对10组数据,迭代100次进行分类误差统计分析可知,随着信号噪声强度增大,剪枝算法的分类误差上升很快,Bagging次之,最小二乘分类算法误判率一直较低,优化的最小二乘算法误判率随着噪声强度的增加小于前两种算法,但大于最小二乘算法,主要原因是随着噪声强度的增加,小强度目标信号易被判别为背景信号,即为了避免“过拟合”引起的误判率增大。

图11 不同分类器时间复杂度Fig.11 Time complexity of different classifiers
图11分析了算法的时间复杂度,即样本大小对消耗时间的影响。从时间复杂度的定义可判断出Bagging算法的时间复杂度与样本数量的平方成正比,Pruning、LSSVM、PLSSVM算法时间复杂度与样本数据成正比。从图11可看出,样本数据从80 增加到880时,LSSVM 及PLSSVM的耗时高于Pruning算法,主要由于算法的时间消耗除了与时间复杂度有关外,还受执行代码数量及停止条件影响。LSSVM算法循环体中程序代码较多,导致耗时较多,而PLSSVM 在算法执行过程中剔除了错分类点,致使循环次数减小,所以耗时减少。
为了验证优化后最小二乘算法的优越性,利用文献[18]中的不同噪声强度的5组数据对不同算法进行测试,测试结果如表3所示,Ni代表第i组数据,Px代表虚警率,PL代表漏警率,t代表消耗时间。从表中可以看出,Pruning算法的漏警率较高,平均超过8%,Bagging算法效果较好于Pruning算法,LSSVM算法与前两者相比,虚警率和漏警率都有较大提高,而PLSSVM算法不仅提高了检测的正确率,消耗时间还下降了近1倍,十分符合动态弱小目标探测对实时性的要求。
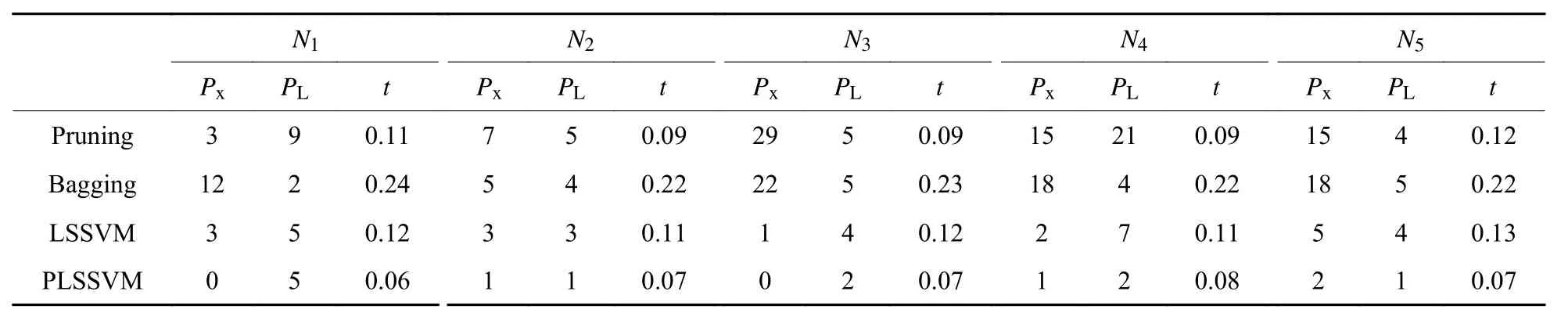
表3 不同算法对测试数据的测试结果Table3 Results of different algorithms on test data
4 结论
本文首先依据红外弱小目标探测模型,推导了有无目标存在时,探测器输出电压比随探测波段变化的模型,基于此模型,仿真分析得出:1)无论目标温度与背景温度是何种比例情况,电压比随探测光波段的变化都很明显,说明通过分析复杂背景下不同探测波段输出的电压比来探测目标是可行的;2)低速时,9 μm~11 μm是最佳探测波段,且前向信号包络小于后向,但两者相差不大,随着速度的增大,短波段的电压比增幅大于长波段的增幅,当目标速度V≥1 020 m/s时,3 μm~5 μm 成为最佳的探测波段,前后向信号包络差距变大。说明光谱信号也可反映出目标的速度信息及两机态势,进一步说明靠单一波段探测目标,漏警率较高,且载机的探测距离容易受限。
基于上述讨论,构建了空中弱小目标双色比特征空间,并采用最小二乘原理对特征空间分类,较好地实现了对空中弱小目标的检测。通过仿真发现,优化的最小二乘分类法,通过剔除异常点,有效地解决了传统算法的“过拟合”问题,同时提高了目标的检测速率,不失为一种空战动态目标检测的高效方法。
