脉冲激光测距回波信号时间选通处理技术
2020-04-12
(北京信息科技大学 仪器科学与光电工程学院,北京 100192)
引言
激光测距是一种非接触式的距离测量技术,它利用光子飞行时间来计算目标距离[1]。激光测距法可分为脉冲激光测距法、相位激光测距法和干涉测距法[2-4]。干涉测距法对外界环境以及测距设备的要求较高并且抗干扰能力弱,一般只在特定场合使用。相位激光测距装置成本高、测量速度慢、需要合作目标辅助测量。脉冲激光测距法量程大、测距速度较快并且无需合作目标。对于导弹等高速相向运动目标进行测距时,脉冲式激光测距的调制频率通常在几十赫兹,导致距离刷新频率较低,造成测距滞后[5]。因此在保证测距系统性能的前提下,高重频脉冲激光测距技术应运而生。与常用的测距技术相比,高重频脉冲激光测距技术具有测距滞后小、能够对目标的工作波段及工作体制进行探测、结构简单、对光源相干性要求低等优势,在工业、航空航天、大地测量、建筑测量和机器人等领域得到了广泛应用[6-7]。目前,各种用途对高重频脉冲激光测距准确度的要求越来越高,如何能可靠、准确地探测目标漫反射返回的衰减和畸变的激光脉冲回波信号是一个关键问题[8]。
常用的脉冲激光测距方法包括全数字激光测距、激光多周期测距、基于自动增益控制技术的脉冲激光测距等[9-11]。随着自动增益控制技术的发展,研究者越来越多地将自动增益控制技术应用于脉冲激光回波处理。芬兰奥鲁大学研究人员采用衰减器结合幅度探测手段对接收机进行自动增益控制,有效提高了近程测距精度[12],但是缺乏对背景光噪声变化的适应能力。在分析了脉冲激光测距回波接收系统增益控制手段及范围的基础上,中国科学院上海技术物理研究所郭颖等人提出了一种基于回波幅度和噪声探测的自动增益控制方案,有效提升自动增益调节对背景光噪声变化的适应能力,但是该方法测距量程较短[13]。中国科学院大学程鹏飞提出大动态范围高精度激光测距技术,不但动态范围大,而且精度较高,但是未对误识别率进行有效抑制[14]。
综上所述,国内外用于高重频脉冲激光测距回波处理方法在回波信号识别方面还有待改进。为了剔除高重频脉冲激光测距回波信号中的干扰脉冲信号,以免造成信号误识别,带来粗大误差,本论文研究实施了一种脉冲回波信号的时间波门选通处理方法。
1 激光测距原理与系统
脉冲激光测距原理是利用速度、时间和路程之间的关系,即激光脉冲从发射到经被测物体反射回来所用的总时间的一半再乘以激光的传播速度,得出被测目标距离[15]。假定被测目标距离为S,则

式中:t为测得的激光脉冲往返经过的时间;c为光速,约为3×1 08m/s。
常规高重频脉冲激光测距系统如图1所示。系统主要由数据处理和控制模块、高重频脉冲激光器、接收望远镜、光电接收与转换模块、信号调理模块、计时模块组成。数据处理和控制模块产生并输出脉冲对激光进行调制,产生脉冲激光输出;接收望远镜将脉冲回波信号进行收集;光电接收与转换模块将收集的光信号转换为电信号;调理模块将回波电信号进行滤波、放大、时刻判别处理;计时模块计算调制脉冲和脉冲回波信号之间的时间。回波信号中不仅包含脉冲回波信号,还包含传播过程中引入的各种干扰信号,如激光瑞利散射、背景光等造成的干扰信号,如图2所示。干扰信号容易被系统误认为脉冲回波信号,造成系统的粗大误差。

图1 常规高重频脉冲激光测距系统Fig.1 Conventional high repetition rate pulse laser ranging system

图2 干扰信号Fig.2 Jamming signal
2 脉冲回波信号调理模块
脉冲回波信号转换为电信号后需要进行专门调理,调理模块包括带通滤波器、数字自动增益调节(automatic gain control,AGC)模块、高速比较器模块,如图3所示。带通滤波电路实现对脉冲回波信号滤波;数字AGC 模块实现脉冲回波信号幅值稳定在一定范围;高速比较器实现对脉冲回波信号整形。
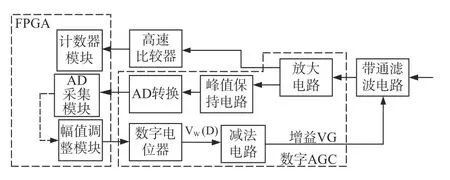
图3 调理模块Fig.3 Conditioning module
为了降低系统的误识别率,提升峰值采集值的精确度,特别采用具有回波信号时间选通处理技术的数字AGC 模块,如图4所示。设计测量距离500 m~5 000 m,脉冲回波信号强度为2 mV~2 000 mV的调理模块系统,系统由可变增益控制部分、峰值采集部分和时间选通部分组成。
采用FPGA 控制数字电位器实现对可变增益放大电路(variable gain amplifier,VGA)的程序控制。为了使VGA 满足系统80 dB 回波强度的变化范围,采用两级可变增益运放AD603。FPGA 通过SPI 控制数字电位器的分压比,实现对VGA的增益控制。增益表达式为

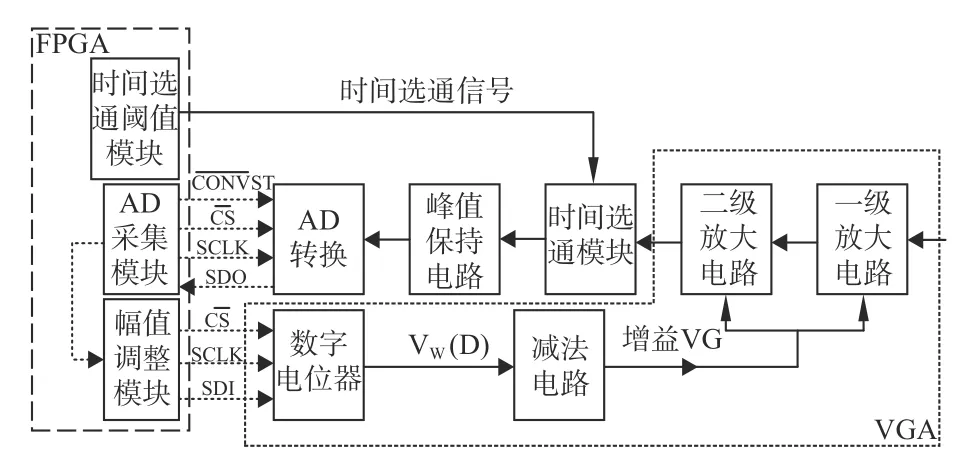
图4 采用时间选通的数字AGC 模块Fig.4 Digital AGC module with time-gating
峰值采集电路,由高速峰值保持电路和高速AD 采集电路组成。峰值采集电路将脉冲回波信号峰值保持并通过AD 采集,完成幅值调节。峰值保持电路能够检测和保持快速窄脉冲峰值,但峰值采集输出结果既受信号峰值影响又受起始相位影响,造成信号峰值采集出现误差。不同起始相位、相同幅值下峰值保持值的输出如图5所示。
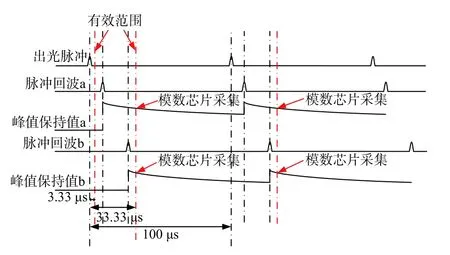
图5 不同起始相位、相同幅值下的峰值保持值Fig.5 Peak holding value under different starting phases and same amplitude
从图5可以看出,由于脉冲回波信号起始相位不同,造成峰值保持值的衰减程度不同,使得相同幅值的脉冲回波信号采集的幅值不同,影响自动增益调节准确性。
时间选通模块不仅可降低误识别率,还提升了峰值采集结果的准确性。具体措施是通过高速模拟开关芯片将有效信号时间窗之外的信号排除,只允许时间窗内的信号进入系统。设测距机的最近及最远测距距离分别为Lmin和Lmax,则:其中有效时间窗的起始时刻t1和结束时刻t2分别为


式中:c为光速,t1和t2从激光出光时刻起计时,在本文所述系统中Lmin=500 m,Lmax=5 000 m,代入上式可得t1=3.33 μs,t2=33.33 μs。从时 间 窗 开 始,AD 以2 μs 采集一次数据的速度采集峰值保持值15次,并计算最大值,确保每次采集到真实的峰值,提高自动增益的精确度。时间选通控制信号由FPGA 根据激光调制脉冲产生。时间选通模块实物图如图6所示。
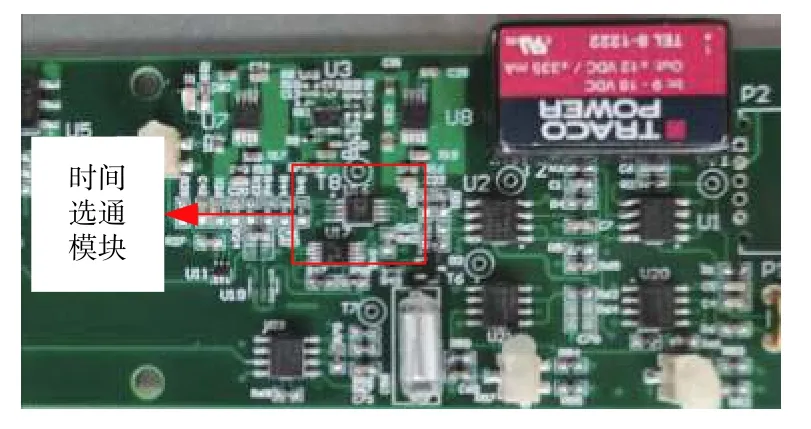
图6 时间选通模块实物图Fig.6 Physical diagram of time-gated module
3 测试实验及数据处理
峰值保持电路在不同起始相位、相同幅值脉冲回波信号下,AD 在时间波门内的峰值保持信号如图7所示。
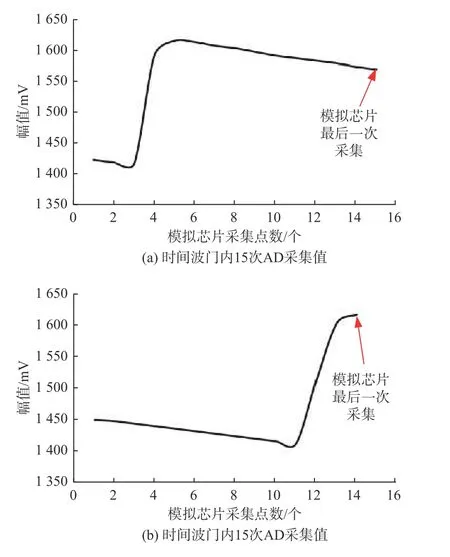
图7 时间波门内不同位置、相同幅值的峰值AD 采集值Fig.7 Peak AD values of different positions and same amplitude in time gate
从图7可以看出,时间波门内采集15次峰值保持值并求取最大值,有效解决起始相位不同、幅值相同的脉冲回波信号引起峰值采集值不同的问题,相比常规峰值采集值的方法,该条件下所计算的峰值采集值,精度提高12.6%。
改变脉冲回波信号的幅值后,回波脉冲信号波形如图8所示,输入2 mV 脉冲回波信号如图8(a)所示;输入500 mV 脉冲回波信号如图8(b)所示;输入1 V 脉冲回波信号如图8(c)所示;输入2 V 脉冲回波信号如图8(d)所示。

图8 经过调理模块后的回波信号Fig.8 Echo signal after conditioning module
从图8可以看出,采用时间选通处理技术后,调理模块系统能够将2 mV~ 2 000 mV范围内不同幅值的脉冲回波信号调节到1 V,很好地实现了自动增益控制功能。
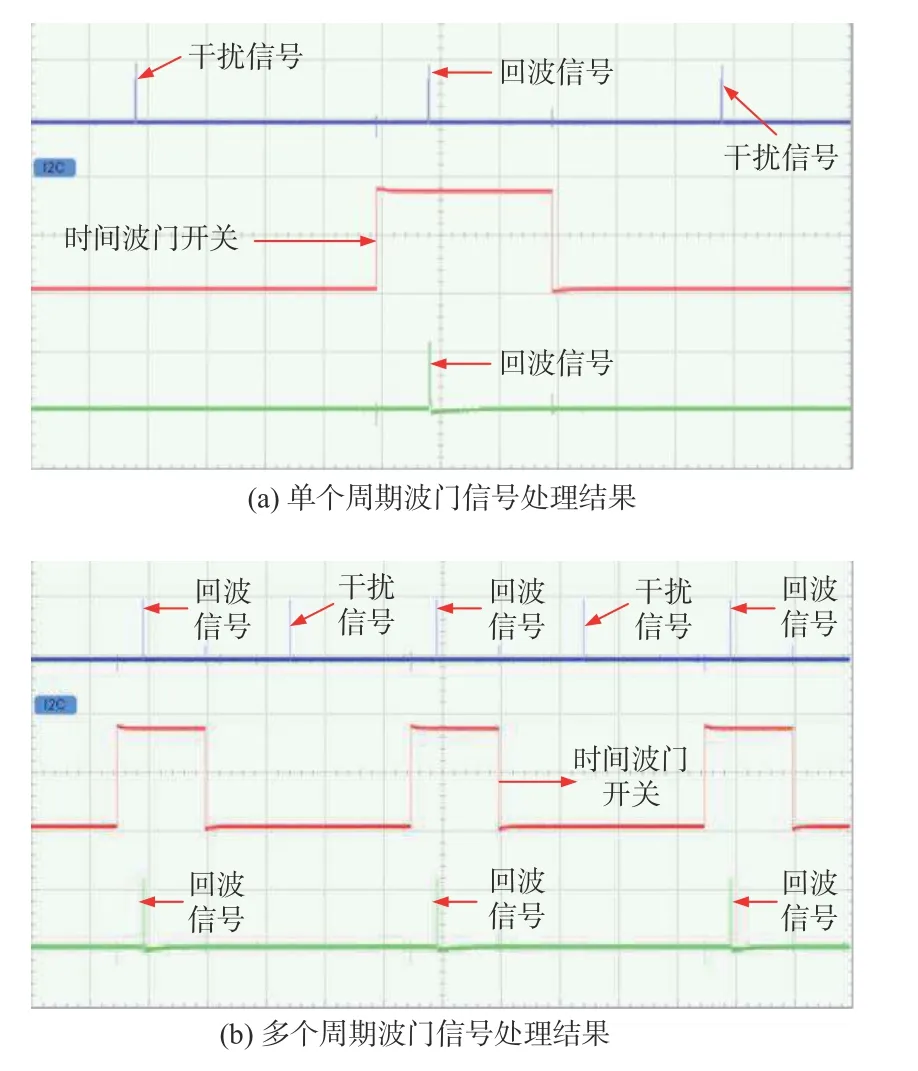
图9 采用波门开关的波形图Fig.9 Oscillogram with gate switch
为了验证系统低误识别率,在时间波门3.33 μs~33.33 μs范围以外设置一个高频脉冲信号如图9所示。单周期波门信号及其效果如图9(a)所示;多周期波门信号及其效果如图9(b)所示。
从图9可以看出,采用时间选通处理技术后,调理模块系统能够将高频干扰信号有效滤除,有效地降低了系统的误识别率。
4 结论
高重频脉冲激光测距系统拥有广阔的应用场景,其特点是重复频率高、结构简单、对光源相干性要求低、测量速度快,但是目前针对高重频脉冲激光测距系统误识别率低、峰值采集值精确度低等问题缺少有效方案。论文针对性地研究了高重频脉冲激光测距回波信号时间选通处理技术,并搭建高重频脉冲激光测距调理模块系统,进行测试实验。实验结果显示,峰值保持电路输出信号的精度提高12.6%左右,回波信号中干扰脉冲信号被有效剔除。
