复杂背景下结合颜色和分形特征的多目标检测
2020-04-09郑淋萍刘华巍周小平黄继风
郑淋萍,王 斌,刘华巍,周小平,黄继风
(1.上海师范大学信息与机电工程学院,上海201418;2.中国科学院上海微系统与信息技术研究所微系统技术重点实验室,上海200050)
0 引 言
目标检测技术在军事、工业等领域有着重要的应用,偏远地区的地形和自然环境复杂多变,导致人为监控操作难以实现[1].随着无线通信技术、嵌入式系统和无线传感器技术的发展,无线传感器网络[2-3]广泛应用于野外目标监控.通常情况下,无线传感网包含多种无人值守传感器节点,这些传感器节点需要长时间且连续地执行监控目标的任务,但其计算资源和能源有限,这对算法的复杂度和实时性提出了较高的要求.
复杂自然背景下,图像存在灰度分布不均匀且不平稳,人造目标数量未知,纹理、结构和颜色与背景相似,边缘模糊,特征不稳定性等问题,多个目标之间容易相互干扰,造成多目标检测效果[4].因此,准确、快速、有效地提取出复杂自然背景中的多个人造目标,并提高检测算法的准确性和实时性是亟待解决的问题[5].
分形理论的发展为目标检测技术提供了全新的理论依据,分形特征是自然背景和人造目标之间存在明显不同的特征量,是一种在一定范围内不依赖于尺度大小和图像分辨率的稳定特征量[6].然而,在实际复杂自然场景中,受环境因素和成像噪声的影响,目标和背景在分形特征上容易产生交叠,仅用单一分形特征进行检测是不够的,所以需通过构造不同特征的组合,以期达到更好的检测结果[7-8].本文作者结合分形维数和分形拟合误差这两种分形特征,添加图像的颜色特征,提出一种新的复杂自然背景下多目标的检测算法.该算法用信息互补的方式,有效地发挥了图像颜色空间和灰度空间的双重优势,提高了算法的检测速度和准确率.
1 彩色图像分割
1.1 颜色空间转换
面向设备的RGB颜色空间[9]是一种十分常用的彩色显示空间,其物理意义明确,但是RGB中的3个分量高度线性相关,并不适合直接进行彩色图像分割.
1976年,国际照明委员会(CIE)提出了Lab彩色空间.Lab彩色空间表现能力强,色域宽,在进行彩色图像分割时能够使不同颜色区域之间的差异更加显著[10].Lab 彩色空间弥补了RGB 彩色空间色彩分布不均匀的缺陷,且在同样精度下具有更多的数据信息,可以将图像的RGB非均匀颜色空间转换到Lab均匀颜色空间,实现分割空间的转换[11].
将RGB 颜色空间转换到CIE 颜色空间,全部颜色特征由CIE 颜色空间中的3个分量(X,Y 和Z)组合定义,通过坐标变换得到均匀Lab颜色空间,变换过程如下:


其中,t为CIE颜色空间色道值与刺激值的比值;参数R,G,B为RGB颜色空间的3个色道分量;参数L,a,b为Lab颜色空间的3个色道分量.
1.2 改进K-means聚类分割算法
RGB图像转换到Lab颜色空间之后,采用改进的K-means聚类分割方法[11]对图像像素点进行分类.
传统K-means 聚类算法首先确定K 个类别,对每个类别确定一个初始聚类中心,计算各像素点到K个聚类中心的欧氏距离,根据欧式距离最短的原则,划分到像素点的类别,形成K个簇.完成一次分类操作后,需要重新计算聚类中心,一般取每个簇的均值作为新的聚类中心.按照以上步骤反复迭代,直到新的聚类中心与前一次聚类中心的差值小于一定阈值,算法收敛,停止迭代,聚类完成[12].
由于K-means聚类算法的初始聚类中心通常是随机选择的,容易导致局部最优解情况,且类别数K的计算量巨大,本研究中参数K 是人为输入.由先验知识可知增加类别数K 将得到更加精细的分类结果,有助于后续提取的目标具备较好的形状与边缘,由实验可知,K 值取6较合适.图像中某一颜色均匀的小面积对象在灰度直方图上的特点为像素点集中分布在个别灰度级上,形成孤立的波峰[10-13].为了解决局部最优解问题,初始聚类中心采用图像灰度直方图中明显突起的大波峰处的像素点.通过以上改进,实现简单自适应过程,算法步骤如下:
1)在N个样本点中,由灰度分布直方图找出有明显突起的K个峰值作为初始聚类中心;
2)计算每个样本xi(i=1,2,…,N)到K 个初始聚类中心的欧式距离Di,找出每个样本点到这些初始聚类中心的欧式距离最小值,则将xi分到该类别;
3)计算每个簇的均值,更新该类的聚类中心值;
4)将最新一次所得聚类中心与前一次所得聚类中心进行比较,判断收敛情况,若两者差值小于阈值,则聚类完成;否则,重复步骤1)~3).
2 区域分形特征提取
利用颜色信息进行K-means 聚类分割后,去除大面积背景区域,保留含待测目标的小面积区域,对保留的区域提取分形特征,利用人造目标和背景在分形特征上的固有差异,排除自然背景奇异区域干扰,实现目标检测[14-16].
2.1 改进地毯覆盖法
分形维数表示图像表面的纹理粗糙程度.表面光滑的物体,对应的分形维数较低;表面粗糙的物体,对应的分形维数较高.因此,人造目标的分形维数较低,自然背景的分形维数较高,通过对比图像像素点的分形维数值,可确定目标区域.
常用的计算分形维数方法有差分计盒维数法和地毯覆盖法等[17].为进一步简化运算,提高检测速度,采用改进地毯覆盖法[18]求小面积区域的分形维数和分形拟合误差.用图像灰度表面作为基准面,与图像灰度表面起伏状态一致的表面称为地毯,用以覆盖这个基准面.地毯的取值范围与图像的灰度值范围一致,均为0~255.距离基准面灰度层以一定的尺度对地毯进行划分,得到多层起伏状态一致且不相交的灰度层,不同尺度灰度层对应的划分结果不同,具体步骤如下:
1)确定待检测图像灰度表面中的灰度最大值和最小值,将255减去灰度最大值的差值,与灰度最小值进行比较,取两者中较小值为r=1时划分的最大灰度层个数Nmax.
2)x,y轴表示图像大小;z轴表示在图像灰度分布的三维空间中,取不同的尺度r(r ∈Z),沿x轴或y轴剖面图得到不同的灰度层个数N(r).
3)求出分形维数FD和分形拟合误差e,

2.2 区域双重分形特征提取
改进的地毯覆盖法只计算在不同尺度r下地毯的个数,大幅减化了计算的复杂度.但是提取分形特征的计算量仍较大,因此先对彩色图像聚类进行分割,再对保留潜在目标的小面积区域使用改进地毯覆盖法提取分形特征.这样不但避免了搜索目标的计算量,而且简化了分形特征的提取过程,从而提高了检测速率.
在对图像提取分形特征时,由于复杂自然条件的影响和成像系统噪声干扰,人造目标和自然背景会在分维数特征的数值上产生交叠.造成提取的目标中包含背景信息,出现错误检测结果.采取分形维数和分形拟合误差相结合的方法,首先通过分形维数差异去除误检为目标的小面积区域;然后再利用分形拟合误差进一步排除背景奇异区域的干扰,减少误检和漏检的情况;最后再进行数学形态学操作,实现复杂自然背景下多目标的检测.
3 实验结果分析对比
对Fort Carson 标准图像库的图片进行了仿真实验.图片中自然背景非常复杂,背景主要包括有白云、蓝天、山峦、陆地和草地,人造目标个数未知且杂乱随机分布在图中.采用Matlab 2015b仿真平台,图像的大小为256×256 pixels.图1中人造目标类型有坦克、装甲车和汽车,其中,图1(a)为原图;图1(b)为彩色图像经分割,去除颜色单一的大片背景区域后,保留小面积区域的结果图;图1(c)为采用改进地毯覆盖法计算分形维数,利用人造目标和自然背景的分形维数差异,提取分形特征所得结果图;图1(d)为利用分形拟合误差排除自然背景干扰,采用膨胀运算弥合小裂缝,填平小孔,运用闭运算平滑边界,获得完整目标区域的结果图;图1(e)为本算法框出多个目标的结果图.

图1 基于彩色特征和分形特征的多目标检测结果.(a)原图;(b)最小分割面积合并结果;(c)分形维数特征提取结果;(d)分形拟合误差特征提取结果;(e)目标检测结果
从图1 中可以看出,在Lab 颜色空间中,采用改进K-means 聚类算法,获得了良好的图像分割结果.数据集多为远距离拍摄,目标较远且在数据集图像中所占面积较小,为了得到更加精细的分割结果,在去除较大面积的自然背景区域时,去除了面积最大的2 个类别,能够避免误删大目标的情况.对保留的小片目标潜在区域求分形特征.采用大小为5×5 pixels 的滑动窗口,对保留区域内每一像素提取分形维数和分形拟合误差,排除实际复杂环境所造成的背景奇异区域的干扰,准确提取复杂背景中存在的多个目标.由图1 可知,本文算法能够准确、快速地从复杂自然背景中提取出人造目标,目标轮廓清晰,形状完好,且目标中不存在孔洞.对保留区域以最大外接矩形框出目标,实现矩形框的大小自适应性.
为了验证本算法的有效性,图2给出不同算法的目标提取结果对比.图2(a)为原图;图2(b),(c)分别为采用基于分形维数差异及采用基于分形维数和分形拟合误差的目标检测结果,均存在多处小块背景区域和杂质的干扰,未准确分割出多个目标,且目标均与背景粘连,目标的轮廓不清晰,存在孔洞;图2(d)为本检测算法能够有效抑制自然背景,检测出多个目标,能够保持良好的目标形状和清晰轮廓,且不存在孔洞.
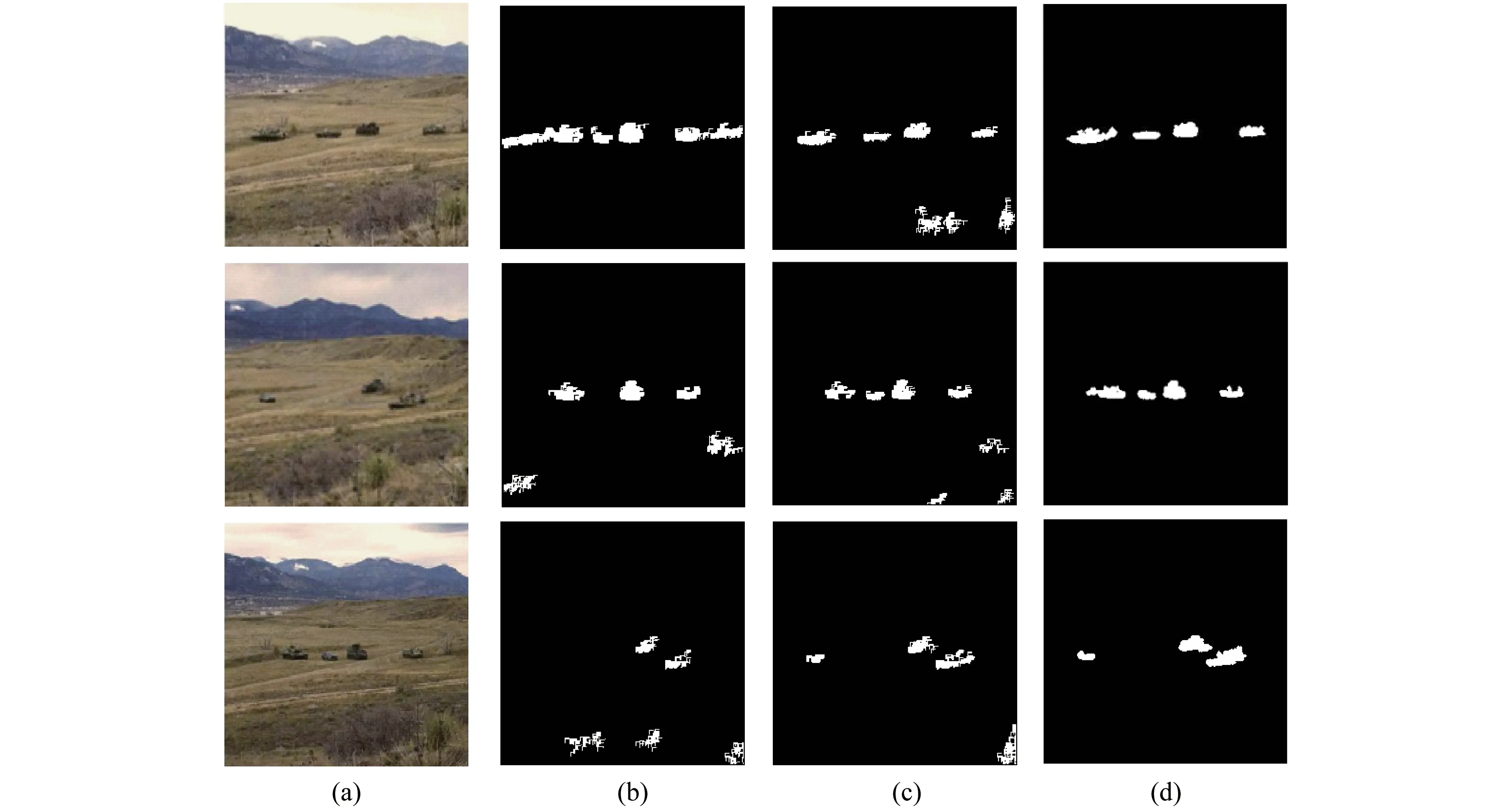
图2 不同算法目标提取结果对比.(a)原图;(b)基于分形维数差异的目标检测算法;(c)基于分形维数和分形拟合误差的目标检测算法;(d)本算法
采用以上几种算法对数据集中含有3及4个待检目标的102张测试图片进行检测,结果如表1所示.其中,平均正确检测目标个数、平均漏检目标个数、平均误检目标个数为每个类别检测到的目标个数除以该类测试图片数目所得.由表1可知,基于分形维数差异的目标检测算法在测试图像中存在漏检和误检情况,将小块背景错误检测为目标的个数较多.相比之下,基于分形维数和分形拟合误差的目标检测算法对漏检情况有所改善,但是依然存在错误检测目标的情况.本算法在漏检和误检个数上都有明显改善,且能正确检测出待测图像中所包含的多个目标.

表1 不同算法的检测结果对比
为了验证本算法的检测速度,表2比较了不同算法在50张256×256 pixels测试图片上的检测耗时情况.实验主机配置为2.60 GHz 主频的Intel Core i7 双核处理器,内存量为8 GB,64 位的Windows 10 操作系统.由于采用改进地毯覆盖法对分割后保留区域提取分形特征,减少了算法的计算量,由表2 可知本算法大幅缩短了检测时间,提高了检测速度.

表2 不同算法检测时间对比 单位:s
4 结 论
针对复杂环境下多目标检测准确率低和检测耗时较长的问题,提出了一种新的复杂自然背景下的多目标检测算法.由于分形特征的计算过程复杂,计算量太大,只对彩色图像分割后保留的目标潜在区域求分形特征,大幅缩短计算时间,提高检测速度.分形维数和分形拟合误差,结合双重检测能够很好抑制自然背景,避免误检、漏检,提高了算法检测的准确性.仿真实验表明:本算法能够快速有效地分割图像并执行多目标检测,具有较好的应用前景.
