基于次级通路离线重构的车内道路噪声主动控制
2020-04-07张希玉张立军孟德建
张希玉,张立军,孟德建
(1.同济大学汽车学院,上海201804;2.同济大学智能型新能源协同创新中心,上海201804)
安静、舒适的驾乘环境是高品质汽车的重要象征。随着汽车电动化进程的加快以及动力系统噪声主动控制技术的普及,车内动力系统噪声得到了很好的控制,同时也使得车内低频道路噪声问题日益突出。传统的噪声被动控制手段,如吸声、隔声和增加声学包等,增加整车重量,与车辆轻量化趋势矛盾,而且难以消除车内低频结构声。因此,应用原车扬声器作为次级源的噪声主动控制方法将是消除车内低频道路噪声的主要发展方向。
车内道路噪声主动控制自1989年由Costin等[1]提出以来,已经有很多研究者在这一领域展开了大量研究,并且形成了许多道路噪声主动控制的演示系统[2-4]。早在1991年普渡大学的Ferren等[5-6]开展了模拟道路噪声主动控制研究,通过台架试验模拟车内道路噪声,基于FXLMS算法实现了70~100Hz频段内最大2.5dB的降噪量。之后南安普东大学Sutton博士等[7-9]也开展了类似研究,并在道路工况下对其控制系统进行评价,测试结果显示:该控制系统可以在不同工况下分别获得最大7dB和5dB的降噪效果。近年来,哈曼[3,10-11]、现代[2,12]等企业也采用类似算法,在车内道路噪声主动控制领域取得较为突出的研究成果。但以上研究均未考虑车内道路噪声的高度色化特性对系统性能的影响,从而导致车内道路噪声主动控制系统的收敛速度和降噪量受到限制。
本文受变换域自适应滤波器设计的启发,结合人耳听觉特性,以计权误差平方和最小化为控制目标,通过理论推导建立了多通道NFWXLMS算法。该算法与传统NFXLMS算法具有完全相同的计算复杂度。通过离线仿真,以粗沥青路面匀速行驶工况下底盘10个加速度信号作为参考信号,以副驾驶员头部位置作为控制目标,对比不同算法的降噪效果和收敛速度。最后,应用实车控制的道路试验验证仿真结果的正确性。
1 多通道噪声主动控制算法
图1为多通道噪声主动控制系统框图。这里假设该系统以J个加速度作为参考信号,M个扬声器作为次级声源,K个麦克风获取误差信号。图中虚线框表示物理系统或物理硬件,实线框表示软件系统,即实时控制器内部执行环节。记J×1维参考信号矢量为:;记M×1维次级源扬声器的输入信号列矢量为:y(n)=;记K×1维的误差信号为:M个扬声器的输入电信号,经电路传输到电声换能元件,转换为声压信号,经声通路传递到到K个误差麦克风位置,经误差麦克风采集得到电信号,构成M×K条次级通路。假设次级通路为线性时不变系统,则次级通路可以表示为M×K个单位脉冲响应函数构成的矩阵,记为

其中,元素smk为有限长列矢量,表示第m个扬声器到第k个误差麦克风的单位脉冲响应函数。次级通路估计是对真实次级通路的建模,可以表示为与次级通路类似的包含M×K个单位脉冲响应元素的矩阵,记为
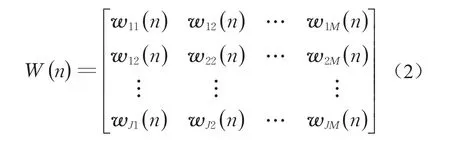
系统中自适应滤波器组W(z)的功能是将J个参考信号转换为M个次级源输入信号,则滤波器组包含J×M个滤波器元素。滤波器组的系数元素记为
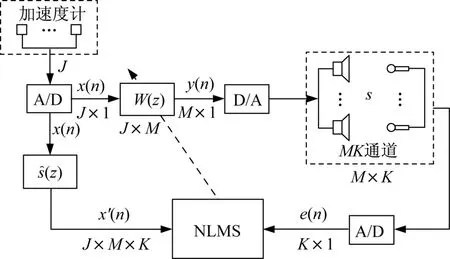
图1 多通道噪声主动控制系统框图Fig.1 Block diagram of multi-channel active noise control system

1.1 多通道NFXLMS算法
当图1所示系统中采用归一化最小均方误差(normalized least mean square,NLMS)算法,以车辆底盘加速度信号和车内噪声误差信号作为输入,车载扬声器作为次级声源时,该系统演化为基于NFXLMS算法的多通道道路噪声主动控制系统。记第k个误差麦克风信号为

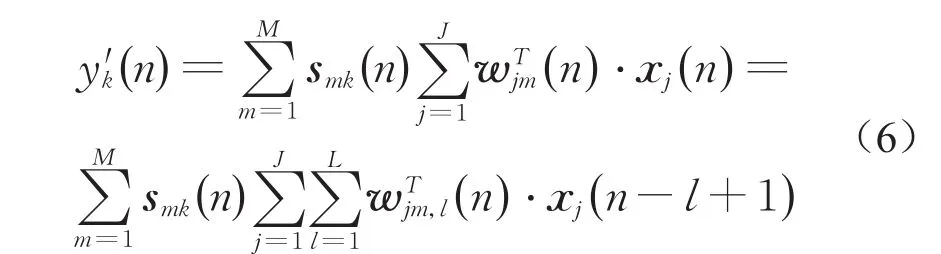
式中:dk(n)表示第n时刻的初级道路噪声信号,即次级源无输出时的误差麦克风响应信号;y′k(n)表示第n时刻的次级声信号,该信号由所有次级源输出经车内声场传播到第k个误差麦克风位置的声压信号叠加而成,可表示为

式中*表示线性卷积运算。将式(3)代入式(5)得到
定义多通道道路噪声主动控制系统的性能函数为

根据最小均方误差算法原理,为了使性能函数取得最小值,自适应滤波器权系数矢量wjm(n)必须沿着性能函数的负梯度方向更新,即

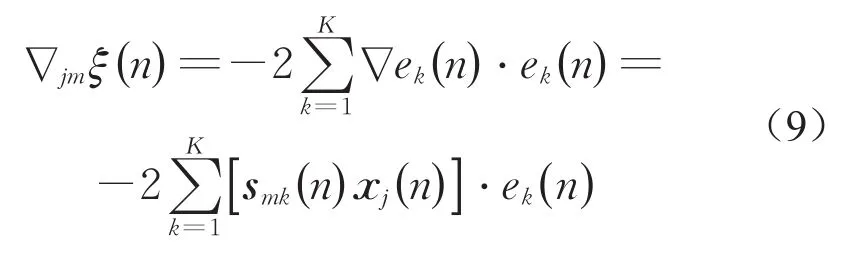
假设次级通路为线性时不变系统,用L阶脉冲响应函数对其进行建模。对应的第m个次级源到第k个麦克风的次级通路估计可以表示为假设次级通路的估计与真实次级通路完全相同,即则式(9)可以改写为
表示经过次通路滤波后的参考信号。将式(10)代入式(8)即可得到多通道NFXLMS算法为

多通道NFXLMS算法可以改写为
1.2 多通道NFWXLMS算法
在NFXLMS算法建立中,控制系统目标函数(7)是最小化系统误差的均方和。这一目标函数对误差信号所有频率成分等同对待,也就意味着对初级噪声在整个频段上实现一致降噪。但是,由于车内道路噪声具有低频能量高、高频能量低的高度色化特性,使得输入信号功率谱方差很大。车内道路噪声的这一特性必然导致控制系统的收敛速度降低。
此外,车内道路噪声主动控制系统的最根本目标是降低车内由于路面激励引起的噪声。其最直观的评价是使得车内乘员听到的噪声水平最低。因此,在客观评价时需要考虑人耳听觉特性,一般要求在A计权意义下的噪声水平最小化。因此,将这一客观评价方法作为此系统的控制目标函数,并不失一般性地假设这一计权过程为H(z),用h(n)表示其单位脉冲响应。计权后的误差信号可以表示为

此时,系统控制框图更新为图2。对应的控制系统性能函数(7)改写为

在第n时刻,性能函数ξ′(n)的瞬时梯度为

将式(17)代入式(8)就可以得到计权意义下的最小化均方误差噪声主动控制算法为
虽然,此算法可以实现计权噪声的主动控制,但算法中的2个卷积运算使得其计算复杂度成倍增加,这在实时控制系统中是不希望出现的。因此,本文提出基于次级通路离线重构的计权噪声主动控制算法。其原理为:通过离线重构方法,将噪声评价中的频域幅值计权特性引入次级通路传递函数估计当中,并且保持次级通路传递函数估计的相位不发生改变。由于次级通路重构过程是离线完成,并且重构前后的次级通路模型阶次不发生改变,因此,可以在不增加任何实时系统在线计算量的前提下,实现任一计权特性的噪声主动控制。图2所示为NFWXLMS算法所对应的噪声主动控制系统框图,其与原系统的差别仅在于次级通路的估计发生了变化。
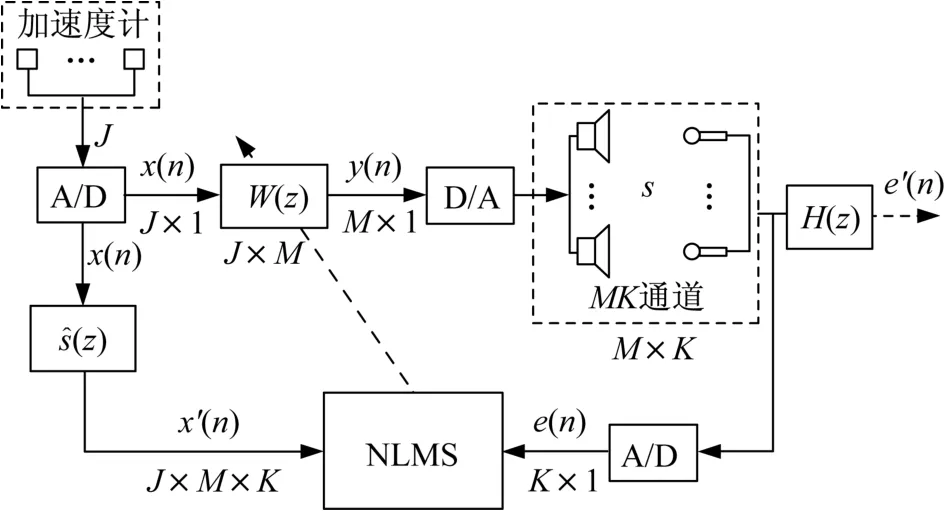
图2 基于NFWXLMS算法的噪声主动控制系统Fig.2 Active noise control system based on NFWXLMS algorithm
假设噪声的频域计权函数为H(z),其对应的单位冲击响应为h(n)。则NFWXLMS算法中的次级通路估计可以表示为

由于式(19)中包含噪声频域计权系统的逆系统,使得其在实时系统中不可能实现。但是由于噪声计权系统和次级通路传递函数的估计都是已知的,因此,上述过程可以通过离线方式实现。重构次级通路的这一特性,从效果上可以实现实时噪声主动控制系统中的计权控制,同时不会在实时系统中引入任何的附加计算量。将次级通路重构的时域方程(19)变换到频域为

可以看出,重构过程是通过在幅值域引入二次幅值计权函数实现的,同时保持原次级通路传递函数估计的相位不发生变换。
将式(19)代入式(12)就可以得到新的计权意义下的最小化均方误差噪声主动控制算法为

为了与式(14)的参考信号滤波最小化均方误差算法在形式上保持一致,将式(21)进一步简化得到

显然,噪声评价指标中的频率计权特性和次级通路滤波过程都是针对参考信号的。因此,将式(22)称为参考信号计权滤波的的最小化均方误差噪声主动控制算法。
1.3 计算复杂度分析
在噪声主动控制中,算法复杂度是算法评估的一项重要指标。算法的计算复杂度由其浮点乘法和浮点加法的计算量具体表征。对多通道NFXLMS算法和NFWXLMS算法的计算复杂度进行分析对比。在实际控制系统中,控制器内运行的部分包括式(11)的参考信号滤波过程,式(3)的次级源输入信号生成过程和式(14)和(22)的自适应权系数更新过程。
显然,2种算法在控制器内的参考信号滤波过程和次级源输入信号生成过程完全一致,因此,其所需计算量完全相同。虽然,式(14)和(22)所示的自适应权系数更新过程不同,但式(19)所示的次级通路重构过程是通过离线运算得到。因此,在实时控制器中NFWXLMS算法的构造后次级通路估计等价于NFXLMS算法的次级通路估计,所以,在自适应权系数更新过程中,2种算法所需的计算量同样完全相等。
在实时控制器中,相较于NFXLMS算法,本文所提的NFWXLMS算法并未增加计算量,即系统计算复杂度完全相同。
2 离线仿真
为了对比不同算法的收敛性和降噪性能,在Simulink分别建立基于NFXLMS算法和NFWXLMS算法的车内道路噪声主动控制系统离线仿真模型。模型包含10个参考信号、2个扬声器信号和1个误差麦克风信号。NFWXLMS算法中的计权滤波器为A计权滤波器。以实车在粗沥青路面上采集的加速度信号和车内噪声信号为仿真输入数据,以实车测量得到的次级通路为模型中次级通路及其估计,对比不同算法的降噪效果及其平均降噪比。
2.1 仿真数据获取
仿真数据由DASP采集获得,以国产某两厢车为测试对象,在校内粗沥青路面完成,测试车速为40km·h-1匀速。测试中在车内4个乘员外耳位置布置4个MP201型声压传感器(图3),其中副驾驶员外耳位置的噪声信号为仿真中的控制目标信号。在车辆底盘上共布置4个PCB 356A15加速度计获取参考信号,具体布置如图4所示。仿真中所用的加速度信号为:副车架与车身接附点的三向和扭力梁与车身接附点的纵向和垂向,共计10个加速度信号。

图3 麦克风布置Fig.3 Microphones arrangement
2.2 次级通路重构
由于本文的噪声主动控制系统属于离散系统,因此,NFWXLMS算法的实现需要获得离散A计权滤波器。根据IEC 61672-1:Electroacoustics-Sound level meters-Part 1:Specifications的定义,在连续频域内声音信号的A计权滤波器可以表示为
式中:f表示模拟域频率,常数f1=20.60Hz;f2=107.7Hz;f3=737.9Hz;f4=12194Hz,归一化常数A1000=-2。为了在离散系统中运用A计权滤波器,这里需要将其变换到数字域。根据模拟滤波器与数字滤波器的转换关系——双线性变换,可以得到当采样频率fs=2048Hz时的A计权数字滤波器为


图4 加速度计布置Fig.4 Accelerometers arrangement

为了实现NFWXLMS算法,需要根据式(25)所示的数字域A计权滤波器对测量的次级通路进行离线重构。为了简化操作过程,运用商业化软件MATLAB中的filtfilt函数实现这一重构过程,重构前、后的一条次级通路传递函数如图5所示。可以看出,次级通路重构后的幅频响应发生了明显的变化,这是因为在幅值内引入了双重A计权特性所导致的。同时,保持了原传递函数的相位信息。
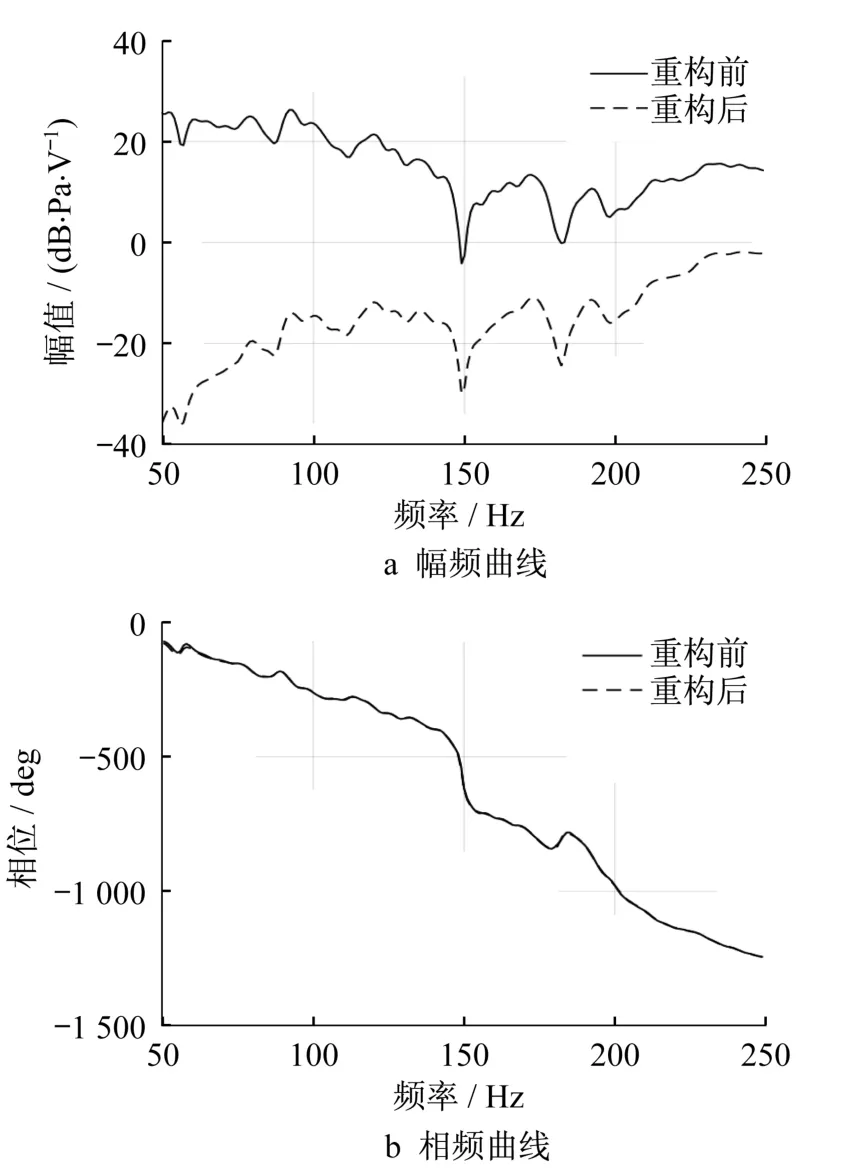
图5 次级通路传递函数Fig.5 Transfer function of secondary path
2.3 仿真结果分析
仿真中2种算法对应的噪声主动控制系统的真实次级通路均以试验测量的次级通路替代,即smk(n)均为512阶有限冲击响应滤波器。在基于NFXLMS算法的噪声主动控制系统中,假设估计的次级通路与真实次级通路完全相同,即也是512阶有限冲击响应滤波器,收敛系数设为0.1。基于NFWXLMS算法的噪声主动控制系统中次级通路传递函数的估计为 2.2 中重构后的 512阶有限冲击响应滤波器,收敛系数设为5。图6所示为上述2种算法的降噪效果。从结果可以看出,在A计权意义下基于NFXLMS算法的噪声主动控制系统的降噪性能较差,不仅降噪量较小,而且降噪后高频成分成为主要噪声成分。基于NFWXLMS算法的噪声主动控制系统的降噪性能优于基于NFXLMS算法的噪声主动控制系统,尤其200Hz以上的降噪量得到了大幅度提升。
究其原因,主要是因为参考信号(或初级信号)具有低频能量高、高频能量低的特点,使得其功率谱密度的方差很大,导致NFXLMS算法的收敛速度较小。由于NFWXLMS算法中引入了输入信号的A计权特性,A计权具有低频衰减大、高频衰减小的特点,因此,计权过程等效于对输入信号的预白化处理,从而加速了算法的收敛过程,使得其降噪效果得到明显提升。
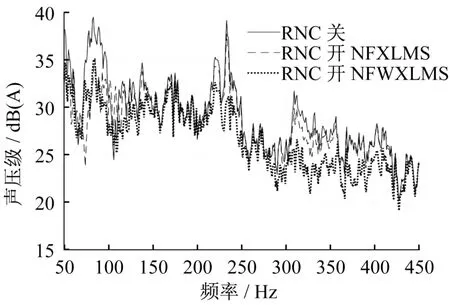
图6 降噪性能对比曲线Fig.6 Performance comparison of noise reduction
图7对比了2种算法的收敛速度。这里不同算法的收敛性能用平均降噪量(mean noise reduction,MNR,MNR)表征。MNR被定义为降噪后的噪声能量期望值在降噪前的噪声能量期望值中的占比,用对数缩放后的MNR可以表示为[14-15]。

由图7所示的收敛曲线可以看出,NFWXLMS算法的收敛速度明显优于传统NFXLMS算法。
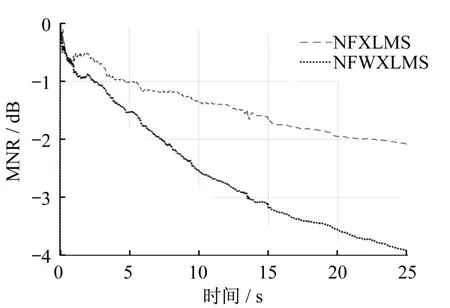
图7 算法收敛曲线Fig.7 Convergence curve of algorithm
3 实验验证
为了进一步验证仿真分析结论的有效性,以某两厢车为对象,基于MicroAutoBox搭建了2种算法的车内道路噪声主动控制硬件在环试验系统。在粗沥青路面上开展实车道路测试与分析。
3.1 硬件在环实验系统
硬件在环试验是控制系统开发初期实现算法验证的重要手段。试验中控制器由实时硬件MicroAutobox担当,控制对象、传感器、执行器和外围电路均为实际物理对象。搭建的车内道路噪声主动控制系统的硬件在环试验平台如图8所示,图9为对应的实车硬件系统。控制系统以6个加速度计测量得到的加速度信号作为参考信号,以1个麦克风测量得到的声压信号作为误差信号。参考信号和误差信号经过D/A转换器转换为数字信号输入MicroAutobox处理器。经过处理器中控制算法运算后得到2个控制信号,数字控制信号经过A/D转换器转换为电压信号,进而经过低通滤波器和功率放大器输入车载扬声器,从而实现车内道路噪声的主动控制。
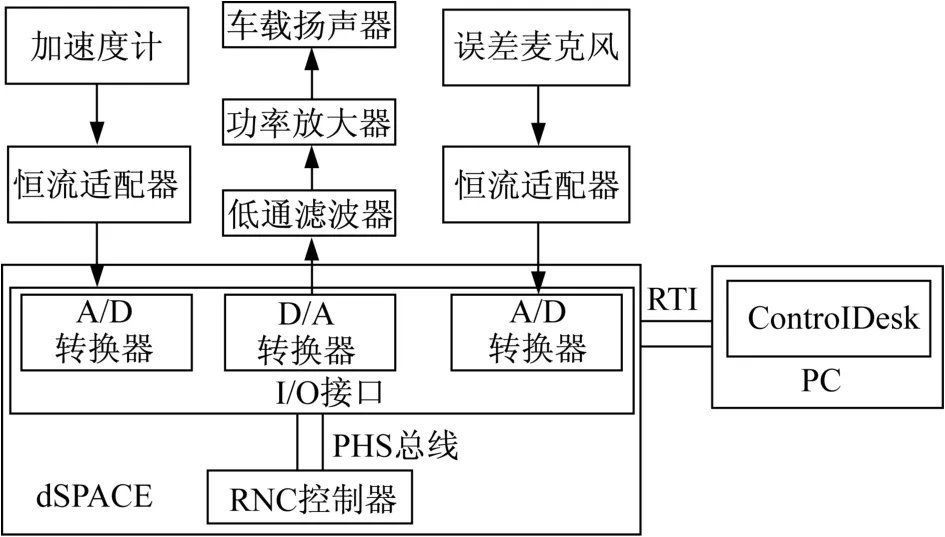
图8 硬件在环试验系统原理Fig.8 Schematic diagram of hardware in the loop test system

图9 硬件在环试验系统Fig.9 Hardware layout of hardware in the loop test system
3.2 测试工况
由于原车扬声器只有在50Hz以上才能正常发声,因此,重点关注50~250Hz内的低频车内道路噪声。试验中以副驾驶员头部位置作为目标降噪位置。以副车架与车身接附点的2个垂向加速度及扭力梁与车身接附点的2个垂向加速度和2个纵向加速度共6个加速度信号作为系统参考信号。以原车前排2个扬声器作为次级声源。次级通路传递函数由实车离线测试得到。
试验在粗沥青路面上进行,试验车速为40km·h-1。试验时天气晴朗无风,周围没有干扰噪声。试验中车窗全部关闭,前排只有驾驶员操纵车辆。试验操作人员位于后排左侧位置,负责试验系统的操作和数据采集。
3.3 结果分析
图10所示为实车道路试验控制效果对比。由于受控制器计算能力影响,在实际试验中仅使用6个加速度信号作为参考信号,因此,实车试验中的降噪量较仿真的降噪量要小。但仍然可以看出,在实车试验中本文所提NFWXLMS算法的控制效果优于NFXLMS算法。2种系统都在70~110Hz和210~240Hz频段内有降噪效果。但NFXLMS算法的降噪量较小,有效频段内的总声压级降低量仅为3dB(A),并且在110~130Hz频段内出现增强现象。NFWXLMS算法降噪量较大,有效频段内的总声压级降低量为6dB(A),降噪量明显高于NFXLMS算法,并且未出现噪声增强。
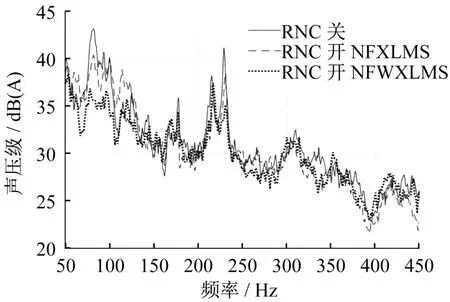
图10 实车控制效果Fig.10 Comparison of on-vehicle test results
4 结论
提出一种基于次级通路离线重构的车内道路噪声计权主动控制算法。通过算法理论推导和计算复杂度对比分析,表明算法可以在不增加计算复杂度的前提下实现计权噪声的主动控制。通过离线仿真和实车控制实验验证了NFWXLMS算法在A计权意义下的降噪量得到了较大的提升,尤其200Hz以上的降噪效果提升更为明显。从收敛速度来看,NFWXLMS算法具有更快的收敛速度。
NFWXLMS算法性能的提升主要是由于离线重构后的次级通路在本质上起到了参考信号的预白化处理,因此,可以进一步根据参考信号的特性,通过计权滤波器的优化设计来提升算法的性能。
