基于HHT 的助飞反潜鱼雷入水信号检测方法
2020-04-02侯代文邓磊明
侯代文,张 虹,邓磊明
(解放军91439 部队,辽宁 大连 116041)
0 引言
助飞反潜鱼雷集导弹及鱼雷技术于一体,由水面舰发射,经空中飞行后入水,在水下搜索、跟踪并攻击目标,具有接敌速度快、反潜覆盖区域大、武器配置灵活等特点,是中、远程反潜的重要武器装备。入水点是鱼雷工作于水上和水下两种弹道的分界点,其精度表征了实际入水位置相对于目标点的散布程度,是助飞鱼雷飞行控制能力的综合体现,也是影响水下反潜作战效能的关键因素,因此,试验中需要准确测量入水点位置,以评定该装备性能[1-2]。
利用浮标阵测量火箭助飞鱼雷入水信号位置时,首先需要检测出入水信号到达各浮标的时刻,然后根据该信号到达不同浮标的时间差,采用双曲面交汇方式解算入水点位置,因此,入水信号检测是确定鱼雷入水位置的前提。
鱼雷入水信号持续时间较短,短时间内重复出现的可能性较小,属于瞬态信号。入水点测量系统在确定入水点位置时,考虑实时性需求,一般采用计算量较小的能量检测或宽度检测方法,这类方法在水声环境较理想的深海或声源距离浮标阵较近的情况下,对入水点信号的测量可以取得较好的效果,但在浅海多途干扰严重、海洋背景噪声大时,对入水信号的检测难度较大,难以保障测量结果的可靠性和准确性。本文通过分析浅海条件下助飞反潜鱼雷空投入水信号的特点,揭示其局部特征,采用HHT 方法[3-9]对入水信号进行检测,改进了瞬态信号的检测效果。
1 入水信号特点及分析方法
1.1 入水信号的特点
助飞反潜鱼雷经空中飞行后入水,水面上下气、液、雷体三者发生强烈相互作用形成入水信号。鱼雷以高速穿过海水表面时,雷头挤压水面,瞬间形成振动波并以声速向外传播。鱼雷进入水面后,带动水体发生运动,能量传递引起水体振动、水花溅落等,通过振动和摩擦,鱼雷动能转化为声能和热能。随后雷体减速,振动减弱,能量转化逐渐结束。典型的鱼雷入水声信号,在雷头击水瞬间约1 ms 内形成一个前沿很陡峭的负压,约2 ms 后变为正压,随后转变为近似阻尼振荡信号,约40 ms 衰减后逐渐隐入海洋背景之中。鱼雷入水声信号是具有典型特征的瞬态函数,在时域其波形具有非对称特点[10-11]。
助飞反潜鱼雷试验时,鱼雷落点一般距周边海岸不超过5 km,属于浅海近岸情况,落点附近舰船辐射噪声,海浪冲击声及海洋背景噪声较大,入水信号前沿往往淹没在噪声中,对于信号检测产生不利影响。另外舰船交通噪声频谱范围较大,峰值通常在200 Hz~2 kHz 之间,在100 Hz~25 kHz 的范围内也均有分布,在频域上与鱼雷入水声信号存在重叠。
为了提高入水信号检测的可靠性,对入水信号的处理包含两部分内容:一是通过对信号的分解与重构,抑制信号中的干扰成分;二是对信号进行变换域分析,提高识别能力。
1.2 HHT 时频分析方法
Norden Huang 等人提出的希尔伯特- 黄变换(Hilbert- Huang Transform,HHT)方法[12-13],首先通过经验模态分解(Empirical Mode Decomposition,EMD)过程将信号分解为有限数目固有模态函数(Intrinsic Mode Function,IMF)信号之和,随后对全部的IMF 信号作希尔伯特变换得到瞬时频率和瞬时幅值,进而得到包含信号时间-频率-能量分布信息的希尔伯特频谱,根据希尔伯特频谱可得到信号的能量随时间和频率的分布情况。处理后的信号既保持了时间信息,又赋予任意点上的频率和能量以物理意义。它突破傅立叶变换分析方法的时频分辨率局限,能够更加精确地表达信号的时频分布,适用于瞬态信号的检测。
1.2.1 EMD 分解
EMD 分解信号时,首先找出信号的所有极大值,利用样条弧线将所有局部极大值连接起来作为信号上包络,然后再找出信号的所有局部极小值,使用样条弧线产生信号的下包络,取极大包络和极小包络的均值产生均值包络线。分解具体过程包含主循环和内循环两个过程,主要包括以下步骤:
1)计算信号x(t)的全部极值;
2)分别用曲线拟合全部极大值和最小值,求取上下包络emax(t)和emin(t);
3)计算均值r(t)=(emax(t)+emin(t))/2;
4)提取高频成分c(t)=x(t)-r(t);
5)对低频余项r(t)重复主循环,直到r(t)达到主循环终止条件。
重复运行主循环和内循环,最终将原信号x(t)分解为k 个IMF 及残余项的和,即:

主循环的次数k 正比于O(log2N)(N 是信号x(t)的长度)。
经过上述分解过程可以将1 个信号分解成k 个固有模态函数和1 个可以当作趋势项的余量。
1.2.2 CEEMD 分解方法
EMD 对信号的分解自适应能力较强,完全靠输入数据驱动进行分解,对于处理非线性、非平稳信号比较有效。但EMD 方法容易出现“模态混叠”,即同一特征尺度振荡波形分解后出现在不同IMF 中,或是不同特征尺度的振荡波形成分包含在同一IMF中。为了克服该现象,N.E.Huang 等提出了EEMD(Ensemble Empirical Mode Decomposition)算法[13],通过在原始数据中反复加入小幅白噪声的方式,并利用EMD 分解的二进制滤波器特性,解决了“模态混叠”现象;以此为基础,Torres 等在2011 年又提出了CEEMD(Complete Ensemble Empirical Mode Decomposition)算法[14],在获取每一阶IMF 之前加入小幅白噪声,用于提高算法在分解过程中的收敛速度,并减少所需使用IMF 的阶数。
EEMD 算法首先把小幅零均值白噪声加入待分解信号,增加极点数量,然后进行EMD 分解,利用白噪声在时域随机分布而在频谱均匀分布的特点,使不同的IMF 信号映射到合适的参考尺度上,以改善分解效果;重复以上步骤,将求得的IMF 取算术平均,因白噪声相互独立,所以平均后的结果信噪比提高[15]。EEMD 算法的数学描述见式(2)和式(3),此处定义算子Ej(·),表示对给定信号作EMD分解,并取第j 阶IMF:
EEMD 算法解决了“模态混叠”问题,但代价是分解收敛速度变慢,计算量增大。CEEMD 算法,利用EEMD 求得IMF1后,对余项r1(t)加噪,再用EEMD方法将其首个IMF 作为IMF2,如此重复运行,直至r(t)达到主循环终止条件。即在获取每一阶IMF 之前加入小幅白噪声,减少了IMF 的阶数,提高了分解过程的收敛速度。其数学描述见式(4)和式(5):
式中,wgn(0,1)表示高斯白噪声。
相比EEMD 分解,CEEMD 在保留加噪分解过程的前提下,收敛速度更快,并降低了运算量;另一方面,CEEMD 在一定程度上减轻了“错位”现象的发生,提高了分解精度和重构精度。
1.2.3 Hilbert 变换域分析
为了进一步提高对入水信号的识别能力,将干扰抑制后的信号转换到希尔伯特域进行处理,在希尔伯特域,利用瞬时能量,识别入水信号。
对单个IMF 分量ci(t)构造其Hilbert 变换及对应的解析信号
相位函数和幅值函数分别表示为:
基于Hilbert 变换,定义瞬时频率

联合考虑式(5)、式(8)、式(9),并忽略余项res(t)的影响,那么实际信号x(t)可表示为:
以CEEMD 分解为基础,利用希尔伯特变换处理该问题。利用式(9)在时-频平面上绘制幅度的分布,称为希尔伯特谱H(ω,t)。类似地,通过绘制幅度平方的时频分布,可得到希尔伯特能量谱H2(ω,t)。
在时频平面上沿频率方向对H2(ω,t)进行积分,可以得到瞬时能量密度级,记为IE:

IE 是时间的函数,用以考察能量随时间的波动,同时也可作为检验统计量应用于信号检测和参数估计问题。
2 试验数据分析
2.1 信号分解方法应用分析
从助飞反潜鱼雷在浅海海域的试验数据中,抽取入水点测量系统的浮标阵获取的10 个入水信号样本,分别利用EMD 和CEEMD 分解后,选取包含入水信号成分的固有模态函数IMF1和IMF2对信号进行重构,重构效果如下页图1 所示,其中,a 为各样本原始信号,b 为EMD 重构信号,c 为CEEMD 重构信号。处理结果大致可分为3 类:
1)样本中入水信号明显,且信号前沿突出,如S2、S4、S6、S8,重构对信噪比的提高直观效果并不明显,但观察S2、S6、S8 发现,重构滤除了背景中的低频干扰。
2)样本中入水信号明显,但信号前沿经过水声信道时,产生了削波效果,信号起始位置淹没在背景噪声中,如S1、S5、S7,重构对于突出入水信号前沿有很好的效果。
3)直接判读样本,较难发现击水声,如S3、S9、S10,重构在一定程度上提高了击水声的信噪比,特别是S9 和S10 经EMD 重构后,入水信号起始部分仍不明显,但信号震荡衰减部分幅度略高于噪声,而在CEEMD 重构后,震荡衰减部分的特征已经变得较为明显。
为定量分析基于CEEMD 信号重构的效果,定义信噪比SNR 如下:

设原始信号中击水声的信噪比为SNR1,信号重构后击水声的信噪比为SNR2,则增益
按照式(15)的方法计算得到图1 中10 个样本,经两种方法重构后的信噪比增益见表1,从表中可见,经CEEMD 重构后的信号增益普遍高于EMD 重构。综合图1 和表1,利用CEEMD 分解提取入水信号是有效的,且较EMD 的分解效果其信噪比更高。
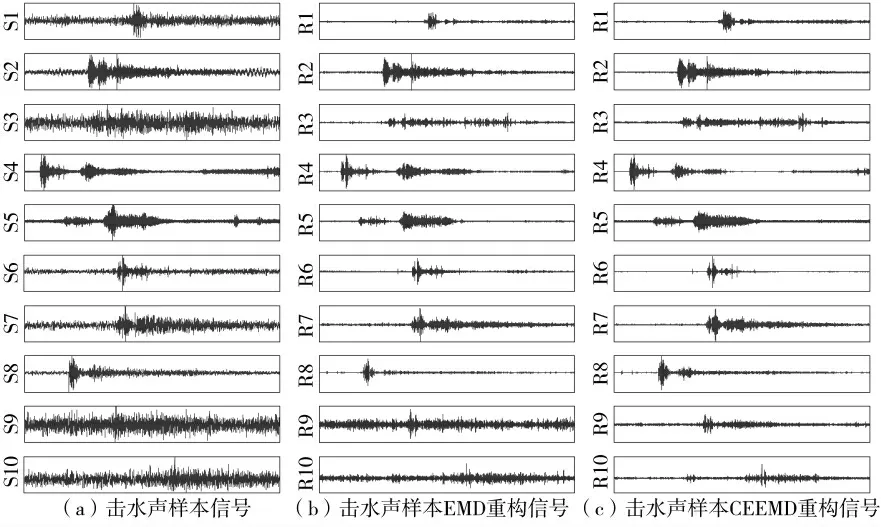
图1 10 个击水声样本原始信号、EMD 重构信号及CEEMD 重构信号的对比

表1 重构后信号的信噪比增益比较
2.2 变换域分析
选取图1 试验数据中的2#、3#、5#、9# 和10#浮标共5 组数据,分别作短时傅里叶变换和希尔伯特变换,估计各浮标数据中的击水声时间延迟。
下页图2 给出了原始信号的基于短时傅里叶谱和瞬时能量密度级的处理结果,2# 浮标估计的时延值为430.928 0 s、3# 浮标430.170 4 s、9# 浮标430.869 3 s,5#和10#没有明显的特征信号。
选取图1 中所有浮标数据的前二阶IMF 重构信号,构造希尔伯特谱和瞬时能量密度级,结果见图3。检测到的击水信号峰值时延结果分别为:2# 浮标430.926 5 s、3# 浮标430.169 7 s、5# 浮标430.156 2 s、9#浮标430.868 4 s,仅10#浮标未发现明显的特征信号,检测效果优于基于短时傅里叶谱分析方法的处理结果。
另外,试验时,根据发射点位置和估计的落点位置,可以反推鱼雷发射方向。两种处理方法估计的助飞反潜鱼雷射向分别为219.35°、241.28°,而鱼雷实际射向为235.71°,可见基于CEEMD 的HHT变换方法的计算结果与实际情况更为接近,这再次说明基于希尔伯特-黄变换的瞬态信号处理方法应用于鱼雷入水信号检测是有价值的。
3 结论
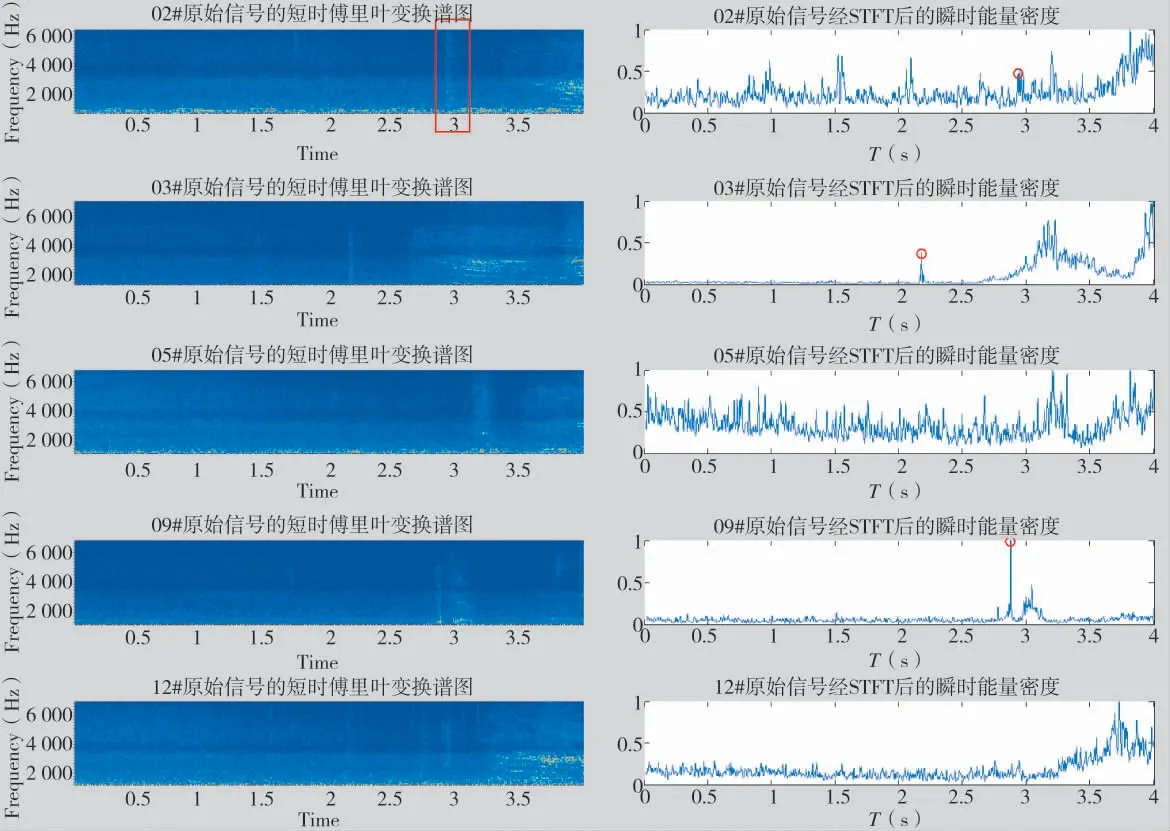
图2 浮标原始信号的短时傅里叶谱和瞬时能量密度级
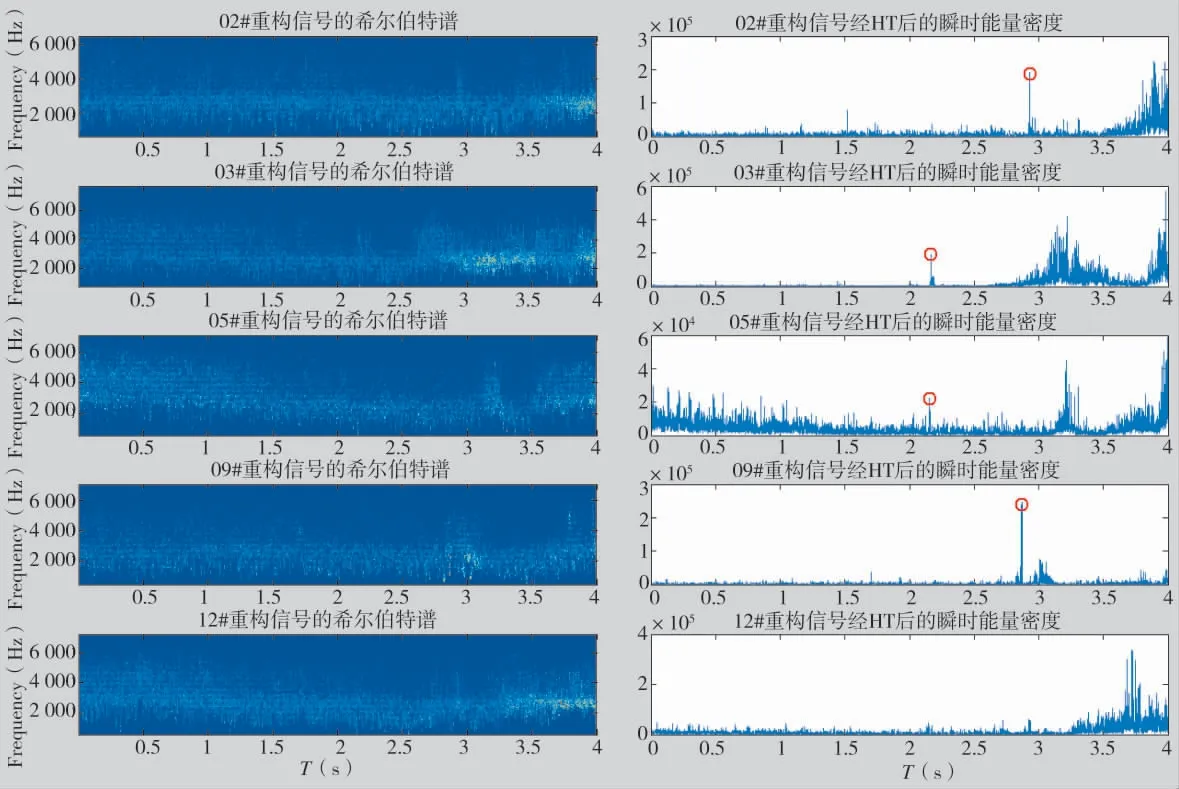
图3 浮标重构信号的希尔伯特谱和瞬时能量密度级
助飞反潜鱼雷入水信号在浅海条件下信噪比低,干扰成分多,能量检测方法无法满足检测要求,采取干扰抑制和变换域分析两种措施可提高信号检测的可靠度。对入水信号这种持续时间较短的瞬态信号,CEEMD 分解方法可显著提高原始信号的信噪比;通过希尔伯特-黄变换在Hilbert 域利用瞬时能量密度级作为检测统计量,能够突出瞬态信号的时域特征,降低信号检测的难度。
基于改进希尔伯特-黄变换的入水信号处理方法应用于实航试验数据,信号检测的可靠性显著提高,为入水点位置的确定以及下一步瞬态信号的自动检测处理奠定了良好基础。
