考虑能耗与负载因素的机器人仿生轨迹规划方法研究
2020-03-28李继强董跃巍沈永旺
杨 冬,李继强,董跃巍,沈永旺
(河北工业大学机械工程学院,天津 300000)
1 引言
轨迹规划对于机器人在其工作空间内有效的工作具有重要意义,对于机器人轨迹规划的研究起源于60年代末,可以分为在关节空间和在笛卡尔空间的轨迹规划两种类型[1-2]。机器人轨迹规划的最终目的是通过所选定的路径点,在满足一定的约束条件下,得出机器人运动过程中各关节的位移、速度及加速度等相关信息[3]。机器人轨迹规划方法最早提出是针对时间最优轨迹规划算法的研究[4-5];同时能耗最优也是机器人评价中重要的性能指标;另外有些研究者将机器人轨迹规划过程中时间及能耗综合起来进行研究[6]。随着研究的深入,仿生机器人正向着刚柔混合结构,一体化,神经元的精细控制,能量的高效利用的类生命系统方向发展[7]。但是,针对生物能量的利用和消耗目前还没有较为完善的研究,大部分机器人均存在能量未得到充分利用的问题。
虽然有些研究者加入了仿生的概念,但只是在结构上有所相似,功能实现上未有很好的突破。针对于以上的轨迹规划方法,本课题仿照工人搬运重物的方法与技巧,以考虑能耗及负载因素的机器人仿生轨迹规划原理与方法为研究目标,采用理论研究、数值模拟和实验分析相结合的研究方法对自主研制的类人手臂机械手轨迹进行分析研究。同时考虑能耗及负载能力的综合因素,与现有轨迹规划方法相比具有较大的优点,实现机器人的超负荷工作,对于降低机器人本体重量、节约制造成本、减少能源消耗、提升运动性能参数具有重要意义。
2 人体上肢运动过程分析
省略了对人体上肢手部的研究,将其等效为前臂的延长刚体。在人体上肢手臂完成抓举杠铃过程中,肱肌和肱二头肌作为主要的发力肌,被称为原动肌。人体的骨骼连接方式可以分为直接连接及间接连接[8]两种,这里所研究的人体上肢肩关节及肘关节均为间接连接。
2.1 人体上肢运动轨迹测量
对其肩关节、肘关节、腕关节及手与杠铃接触点即运动末端点进行标记。通过Kinect for Windows的骨架追踪处理能力对此过程中标记的关节点内部具体变化情况进行捕捉追踪,得出其捕捉到的上肢手臂关节点的详细变化信息[9]。
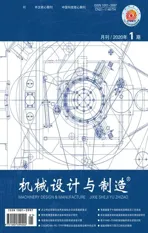
对此运动状态进行多次重复测量,并应用统计学对此过程中标记的各个关节点的位置进行统计,得出人体上肢手臂在举杠铃过程中肩关节、肘关节及腕关节近似运动轨迹,如图1所示。
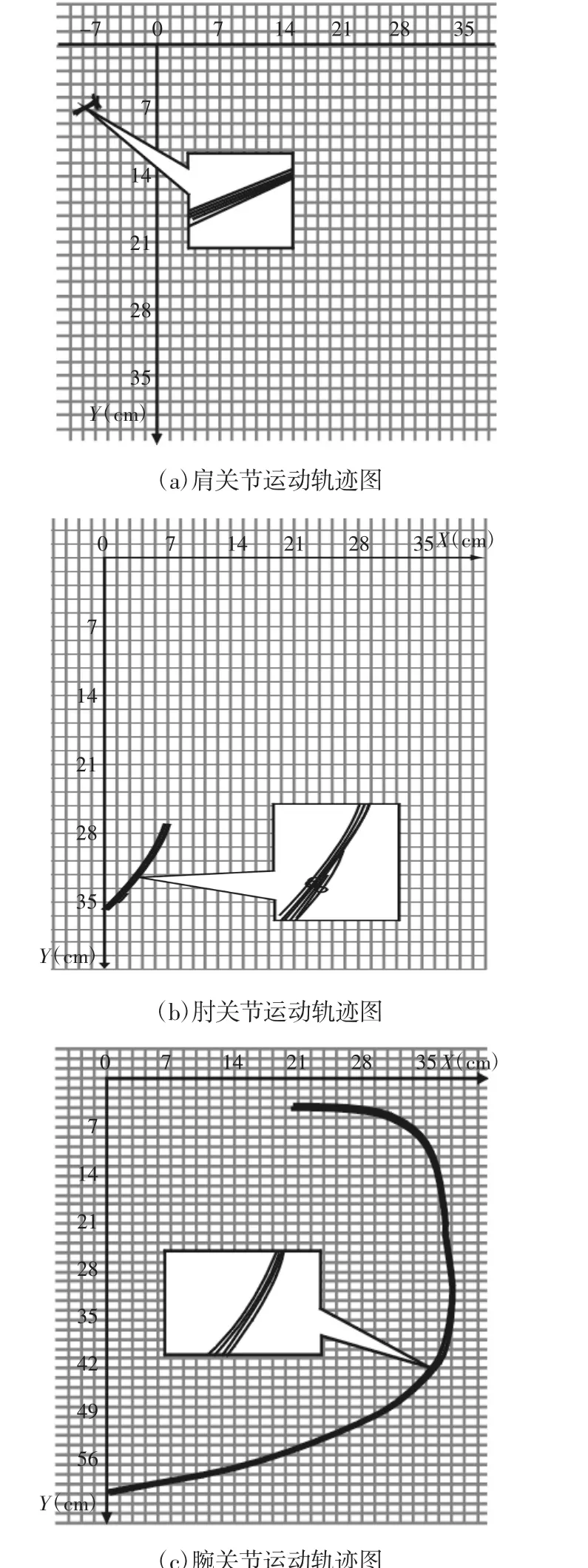
图1 肩关节、肘关节、腕关节运动轨迹图Fig.1 Motion Track of Shoulder Joint,Elbow Joint and Wrist Joint
2.2 肌电传感器对人体上肢动态测量
通过应用美国生产的Delsys Trigno Mobile全无线GPS表面肌电测试仪对人体上肢举杠铃过程中的肌电信号进行多次实时在线采集,三角肌、肱二头肌、肱三头肌及肱肌在人体上肢举杠铃过程中的整体肌电信号变化图,如图2所示。

图2 Delsys EMG信号图Fig.2 Delsys EMG Signal Diagram
截取相同时间段内三角肌、肱二头肌、肱三头肌及肱肌的肌电信号变化情况。其中肱三头肌发力相对较小。三角肌肌电信号最明显。肱二头肌和肱肌作为主要动力肌肌电信号也较明显。上臂段在此运动过程中移动量较小,加速度变化较小。人体上肢手臂在运动过程中加速度呈现先增加后减小的趋势,符合人体上肢的运动特点。
3 上肢运动学及动力学模型建立
将人体上肢模型简化为链连接的三个刚性圆柱体即分别为手臂、前臂和手[10]。
动力学方程:圆柱体 i=1,2,3 性能参数 1i,mi,Ii/o1

图3 人体上肢关节复合体等价自由度分配图Fig.3 Equivalent Degree of Freedom Distribution Diagram of Human Upper Limb Joint Complex
如图3所示,结合肩关节和肘关节的运动学分析可知:人体上肢对应的运动学方程为如下形式:

根据以上所得即建立了一个完整的人体上肢手臂的运动模型。
4 机器人轨迹规划研究
采用多项式插值法对此类人上肢手臂机械手进行轨迹规划的研究,在此轨迹规划过程中将兼顾机器人在此运动过程中的能耗及负载因素,综合考虑各因素后得出适合于本工作任务的轨迹,最后将结合第二章对人体上肢手臂在举杠铃过程中的运动特点及人体上肢手臂建模的分析,将其加入到此轨迹规划中,达到机械手仿人轨迹规划的目的。通过上文对人体上肢手臂等效刚体建模可知,腕关节的运动轨迹可以等效为末端点的运动轨迹,近似人体上肢末端点运动轨迹图即这里所要研究的机器人末端近似轨迹图,如图4所示。

图4 机器人末端近似轨迹图Fig.4 Approximate Trajectory of Robot End
设五次多项式函数表达式为:

由机械手实际运动情况可知,在整个运动过程中其由垂直状态开始到末端点停止,可知此运动过程中起止点位置、速度及加速度信息,即起点 θ(t0)、θ˙(t0)、θ¨(t0),终止点 θ(tf)、θ˙(tf)、θ¨(tf)。同时也可得出其运动过程中某中间点ti的位置θ(ti)信息。对上式求一阶及二阶导可得其速度及加速度信息为:
将机械手起止点已知信息带入,应用MATLAB强大的计算能力,通过MATLAB中的syms函数及solve函数编程解算即可解得各系数。这里所研究的能量因素也只考虑相对应人体模型的这两个关节连杆。所研究的机械手在整个运动过程中的能量转换主要为驱动电机所产生的能量先转化为机械手动能及部分损耗,假如设初始运动的位置为零势能面,那么最后到达目标位置时所得的势能即为整个运动过程中剩余的能量。机械手运动过程中能量转换框图,如图5所示。

图5 机械手运动过程中能量转换框图Fig.5 Block Diagram of Energy Conversion During Manipulator Movement
5 轨迹规划仿真以及实验验证
通过MATLAB中Robotic Toolbox对上节中的轨迹规划算法在自主研制的类人手臂机械手上建立仿真平台进行验证。
5.1 未规划的轨迹规划仿真
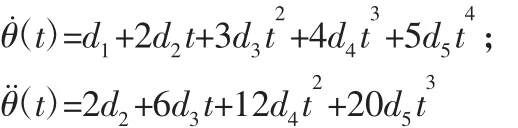
首先仿真平台所加的负载为机器人匀速完成此类人手臂轨迹的最大负载重量10kg,整个运动过程中所需的时间设定为3s,采样间隔设定为1ms。前臂与末端负载重力方向之间的夹角设为,在上述仿真运动过程中末端点加速度随变化如图、末端点各向坐标位置变化曲线图、此运动过程中的能耗变化曲线图,如图6所示。
图6 末端点加速度随ρ变化曲线末端点各向坐标位置变化曲线能耗变化曲线Fig.6 Acceleration Curve with ρ at the End of FIG End Point Coordinate Position Change Curve Energy Consumption Curve
5.2 规划后的轨迹规划仿真
加入人体运动过程中对应的特征位置点信息,对于人体上肢手臂举杠铃过程中的对应特征点在此轨迹规划中进行限制,末端负载能力增加的重量为5kg。在规划后的仿真运动过程中末端点加速度随ρ变化如图、末端点各向坐标位置变化曲线图、此运动过程中的能耗变化曲线图,如图7所示。
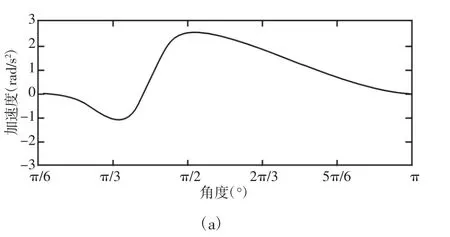
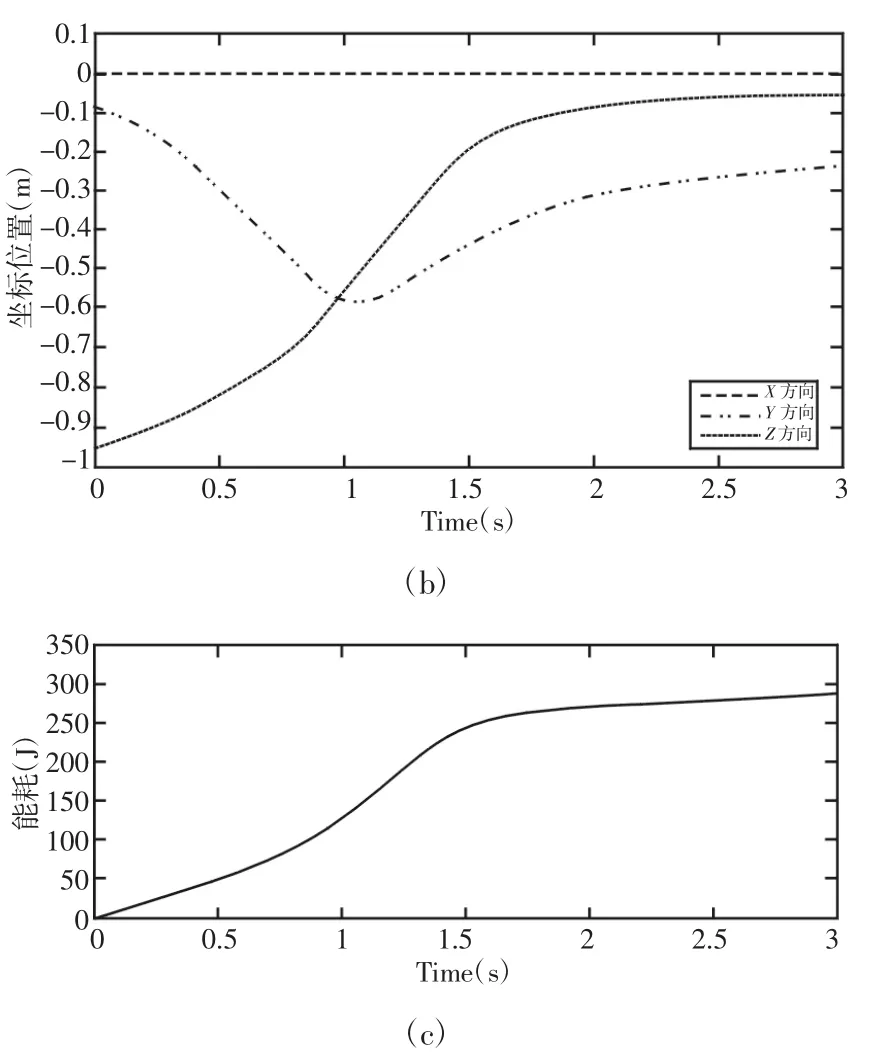
图7 规划后末端点加速度随ρ变化曲线规划后末端点各向坐标位置变化曲线规划后的能耗变化曲线Fig.7 Curves of Acceleration with ρ at End of Planning Curve of Coordinate Position at End of Planning Energy Change Curve After Planning
5.3 仿生轨迹规划实验
机械手整个运动过程与上节仿真相同,运动过程,如图8所示。

图8 机械手运动过程实验截图Fig.8 Mmechanical Hand Motion Process Experiment Screenshot
通过上述机械手末端加载不同质量的负载实验可知,当负载质量小于机械手匀速运动时最弱的位姿状态时的负载质量,机械手均可以顺利的完成工作任务。
6 结论
主要通过仿生原理对人体上肢手臂举杠铃过程中的运动特点进行分析研究,将其特征点信息加入到自主研制的实验样机轨迹规划中,同时兼顾了此过程中的能耗及负载因素。并通过仿真及实验验证了本课题所研究的轨迹规划方法的优越性:
(1)根据工作空间内有效载荷的分布进行动能与势能的合理转换,实现机器人的超负荷工作。
(2)该种仿生轨迹规划方法实现了运动过程中同时考虑能耗及负载能力的综合因素,与现有轨迹规划方法相比具有较大的优点。
(3)实现机器人在工作过程中像人一样超负荷工作,同时在运动过程中对于机器人本体不造成伤害,保证机器人正常工作,明显的提高了机器人工作能力。
今后应该研究实验样机应加入柔性环节以及可进一步加入时间因素,达到负载、能耗及时间的综合最优。