海洋垃圾回收船设计
2020-03-28朱永强张平霞
朱永强,张平霞
(青岛理工大学黄岛校区汽车与交通学院,山东 青岛 266520)
1 引言
当前各城市景区近海水域的水面垃圾污染较多,主要有塑料袋、软包装、饮料盒、塑料泡沫等。而采用人工回收效率较低,而且费用较高,采用垃圾回收船则可较好地解决这一问题。
目前对垃圾回收船的研究主要集中以下几方面:(1)推进驱动方面:文献[1]提出了一种应用于非结构性环境的垃圾清理船推进系统,分析其在常规和非结构环境中的运动原理。(2)自动控制、自动驾驶方面:主要对无人驾驶垃圾清理船从控制、受力、障碍物识别以及垃圾识别等方面进行了分析[2-3]。(3)结构设计方面:主要从结构方面来分析如何提高垃圾清理、如何提高垃圾回收效率等[5-12],进行了新结构的设计、以及向相关部件的运动轨迹以及受力分析。
但在实际实施过程中,由于水面的垃圾,极易随水流动,如何利用这一特点,进行相关结构改进,来提高垃圾回收效率,目前未见相关文献分析。基于此,提出了收拢、导流、传输、分流的回收过程,以加快水面垃圾的回收,并通过分流孔洞,来减小船体行驶阻力,实现垃圾与水的分离。
2 海洋垃圾回收船的设计
海洋垃圾清理船的整体结构,如图1、图2所示。主要由驾驶室、船体、护栏、明轮驱动系统、垃圾传输系统、漂浮物聚拢机构、垃圾导流系统、垃圾箱组成。

图1 海洋垃圾回收船整体结构图Fig.1 The Whole Structure of the Marine Garbage Collection Vessel
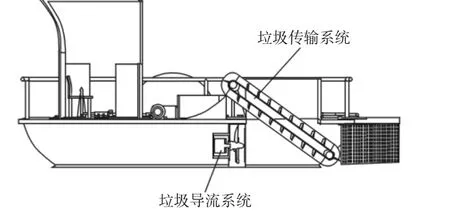
图2 海洋垃圾清理船整体结构半剖视图Fig.2 The Semisectional View of the Marine Garbage Collection Vessel
2.1 船体设计
为了尽可能地扩大水面垃圾收集范围,提高垃圾的收集效率,并增加船体的稳定性,垃圾回收船采用了两侧对称布置、船体中部空置的双船体结构。双船体由两个流线型船体、两个焊接连接板组成,如图3所示。通过上下两个连接板将两船体连接起来,既起到了连接加固的作用,同时可以使水面垃圾快速地进入到两船体之间的导流通道,并顺利地收集进仓。

图3 船体结构Fig.3 The Hull Structure
左右船体是中空的,两船体的壁厚有10mm,且船体左右两侧外壁有15°的倾角,因此可构成上宽下窄的船体结构,有利于减小水流阻力,另外,船的左右船体前端也做成了弧形,这样可以减小水流对船体的阻力。
2.2 明轮设计
该船采用的是明轮式推进系统,即在船的两侧安装明轮。由于明轮的直径非常大,并且入水深度一般不超过半径的1/2,所以可以避免垃圾的缠绕,而且由于明轮的运行处于可视状态,因此也便于及时了解运行状态及维护。本明轮的最大直径为1080mm,明轮的工作面大小为300×680的叶片,通过水压促使船舶前进,工作面的入水深度在150mm左右。明轮通过直径为60mm的转轴带动明轮叶片转动。设计时将明轮设计为六块叶片,形成一个六边形的外观,满足景区美学的需要,如图3所示。为满足回收船前进、后退以及转弯的需要,在船体两侧各安装一个由独立电动机驱动的明轮,来实现同向转动、异向转动、差速转动等。
2.3 垃圾传输装置设计
传输装置是经由动力装置驱动,将水面漂浮的垃圾传输至垃圾存储装置。传输装置放在左右船体之间,通过传送带将水面上漂浮物传输至垃圾收集装置中。传输装置结构,如图4所示。为了使漂浮物在传送过程中不发生漂浮物卡在传送带与船体之间的缝隙中的现象,在传动带两侧设计有100mm高的纵挡板,使得漂浮物能够集中在一起。在传送带的表面每隔一段距离设置一个与传送带面成一定斜角的的高度为80mm的横挡板,形成防滑块,防止漂浮垃圾与传送带之间因摩擦力太小,导致漂浮物不能跟随传送带向上运动。在传送带上根据一定的规则打出一些泄水孔,实现传送过程中的水和垃圾的分离,以减轻传送带的工作负担,降低海洋垃圾回收船的载荷。
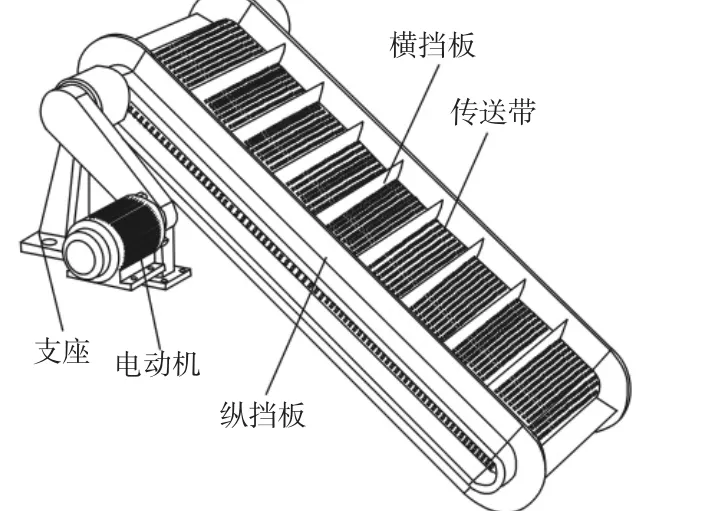
图4 海洋垃圾回收船传送带Fig.4 The Conveyor of Marine Garbage Collection Vessel
2.4 漂浮物聚拢连杆机构设计
由于双船体的结构有限,因此收集海面漂浮物的宽度并不大,左右两船体之间的间距仅为900mm,为了更好地提高垃圾清理的效率,通过设计一个漂浮物聚拢机构,来增大海洋垃圾清理船的工作面。漂浮物聚拢连杆机构由多杆机构组成,可以将传送带口以外的漂浮物用左右两块来回运动的挡板聚拢到传送带口的正面,通过传送带将漂浮物带动上船,最后进入垃圾收集装置中。聚拢引导装置为安装在船首的挡板,该挡板一部分浸在水中,呈外八字向前张开,且可以自由控制张合张角。工作时可根据具体情况进行调节,更好地把前方垃圾引导到传送带的宽度范围内,大大地增加了清理范围。为减小引导板张合过程中所受水的阻力,将引导板做成网状,板上按一定规则布满了孔洞。漂浮物聚拢连杆机构,如图5所示。
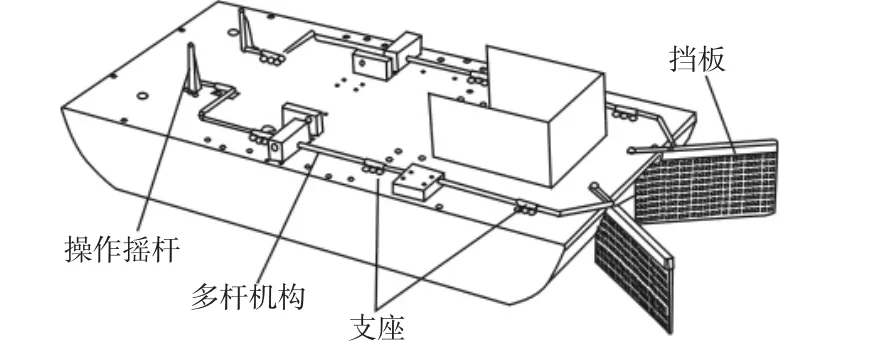
图5 漂浮物聚拢连杆机构Fig.5 Link Mechanisms for Gathering Floating Objects
聚拢板是通过连杆机构来操控的,工作人员坐在操作室即可通过控制操作摇杆,带动多杆机构前后移动来操纵漂浮物聚拢板在一定角度的自由张合,实现海面漂浮物的引导聚拢功能。
漂浮物聚拢连杆机构工作原理:漂浮物聚拢连杆机构由引导聚拢滤水挡板、多杆机构、摇杆、连杆机构定位支座等组成。引导聚拢挡板一端通过销子固定于船首,并且可以(30~90)°之间自由转动。工作时,通过操控摇杆,多杆机构随之前后运动,使多杆机构最前端发生相对移动,多杆与挡板上的滑槽活动链接,多杆机构推动引导聚拢挡板运动,从而调节挡板角度。根据实际的水面情况,通过控制摇杆来控制挡板的角度,从而控制引导装置的张开和闭合来调节收集范围。
2.5 导流螺旋桨装置设计
为引导漂浮物流向海洋垃圾清理船的工作范围,以提高垃圾清理的效率,在两船体之间设有导流螺旋桨结构,如图6所示。同时为防止螺旋桨被水草或其他滕草缠绕,导流螺旋桨还设计有保护壳,如图6所示。根据螺旋桨的结构工作特点,将保护壳设计成一个圆筒型的保护壳,方便螺旋桨的工作。在保护壳的前端面,有均匀分布的圆孔。当螺旋桨转动时,在水中会产生水压形成水流,使海水经过保护壳上的孔洞流到螺旋桨的后方,达到引导海水表面漂浮物的效果。

图6 导流螺旋桨总成分解图Fig.6 The Exploded View of Diversion Propeller Assembly
3 工作原理
由于海洋垃圾在水面上漂浮时,呈现液固两相的属性,即固体垃圾极易随水流动,因此可以利用水为载体,形成特定的水流,带动固体漂浮物,流向传送带附近,便于执行回收动作。(1)收拢:当船舶在海面行驶时,通过左右挡板的引导作用,将水面垃圾初步聚拢到船的前部。(2)导流与初次分流:当导流螺旋桨在电动机带动下旋转时,导流螺旋桨前后产生水压差,水通过螺旋桨保护壳上的孔洞流到螺旋桨的后方,实现水沿着两船体与上下连接板之间的狭长贯通通道,由船的前部流进,后部流出,形成海水的定向流动,从而带动水面垃圾向船前部的传送带区域流动,达到漂浮物二次集中的功能。同时在此过程中,由于传送带以及导流螺旋桨保护壳上孔隙的过滤作用,使一部分水可以透过这些孔隙进入船体之间的贯通通道,向后流动,而水面垃圾则会聚集到传送带附近,实现水与垃圾的初次分流。(3)传输与二次分流:传送带前端一部分伸入水中,因此随着水的流动,垃圾会靠拢到传送带上,当传送带运动时,在摩擦力和传送带横板的作用下,一部分水和垃圾会随传送带向上运动,在运动过程中,水会从传送带上的孔隙泄掉,而垃圾会随传送带一起运动,形成垃圾与水的二次分离,最后垃圾在重力作用下,掉落到传送装置尾端的垃圾桶中,完成垃圾的收集,如图7所示。传送带不断地循环转动,就会将水面漂浮物不断带上船,送入传送装置尾端的垃圾桶中。漂浮物聚拢连杆机构、导流螺旋桨和传送带,这三种装置相互配合工作,大大提高了海面漂浮物的聚拢、排水和收集的工作效率。

图7 垃圾与水的分流图Fig.7 Garbage and Water Diversion Map
4 结论
本垃圾回收船的设计,采用双船体结构,既增加了作业时的稳定性,同时在两船体之间形成的狭长通道又起到了水面垃圾导流的作用。在此基础上还通过增加漂浮物聚拢连杆机构、导流螺旋桨以及分流孔洞,进一步形成收拢、导流、传输、分流的回收过程,实现了水面垃圾的双次聚拢,以及垃圾与水的双次分流,加快了水面垃圾的回收,减小了船体行驶阻力,降低了垃圾的含水量。使垃圾回收效率大大提高,非常适合景区单人操作。