水平旋转搂草机弹齿运动学分析
2020-03-27杜韧赵忠贤李佳栋孟奇凯宋博威田丽丽
杜韧, 赵忠贤, 李佳栋, 孟奇凯, 宋博威, 田丽丽
(北华航天工业学院 机电工程学院,河北廊坊065000)
0 引 言
搂草机作为农牧业收获机械的重要组成部分,主要是将割草机收割过后散落的牧草进行搂集,使其形成规则的草条,进而用圆捆机打捆,以便进行运输和储存。搂草机通常分为横向搂草机、侧向滚筒式搂草机、指盘式搂草机及水平旋转式搂草机4类[1]。在以上几种搂草机中,水平旋转搂草机因其搂草效率高,搂集的草条集中、整洁、透气性好、养分流失率低等优点,在饲草收获过程中应用越来越广泛[2]。但我国的搂草机发展较晚,技术不成熟,国内生产的搂草机质量相对较差,功能上的设计也不齐全[3],国内生产的水平旋转搂草机转速受拖拉机的限制,只能随拖拉机单一转速工作,当拖拉机牵引速度快时,漏草率增大;当拖拉机牵引速度降低时,相邻弹齿臂上的弹齿轨迹重合较多,不仅浪费能源,还会造成草条沙土含量增加[4],所以对水平旋转搂草机转动速度与牵引速度进行配合选取,对提高搂草效率、降低漏草率和提高草条质量有至关重要的作用。研究水平旋转搂草机弹齿运动轨迹,对水平旋转搂草机的整体性能提高具有指导意义和实用价值,并能对新机型改进提供思路。
1 水平旋转搂草机结构及工作原理
1.1 水平旋转搂草机结构
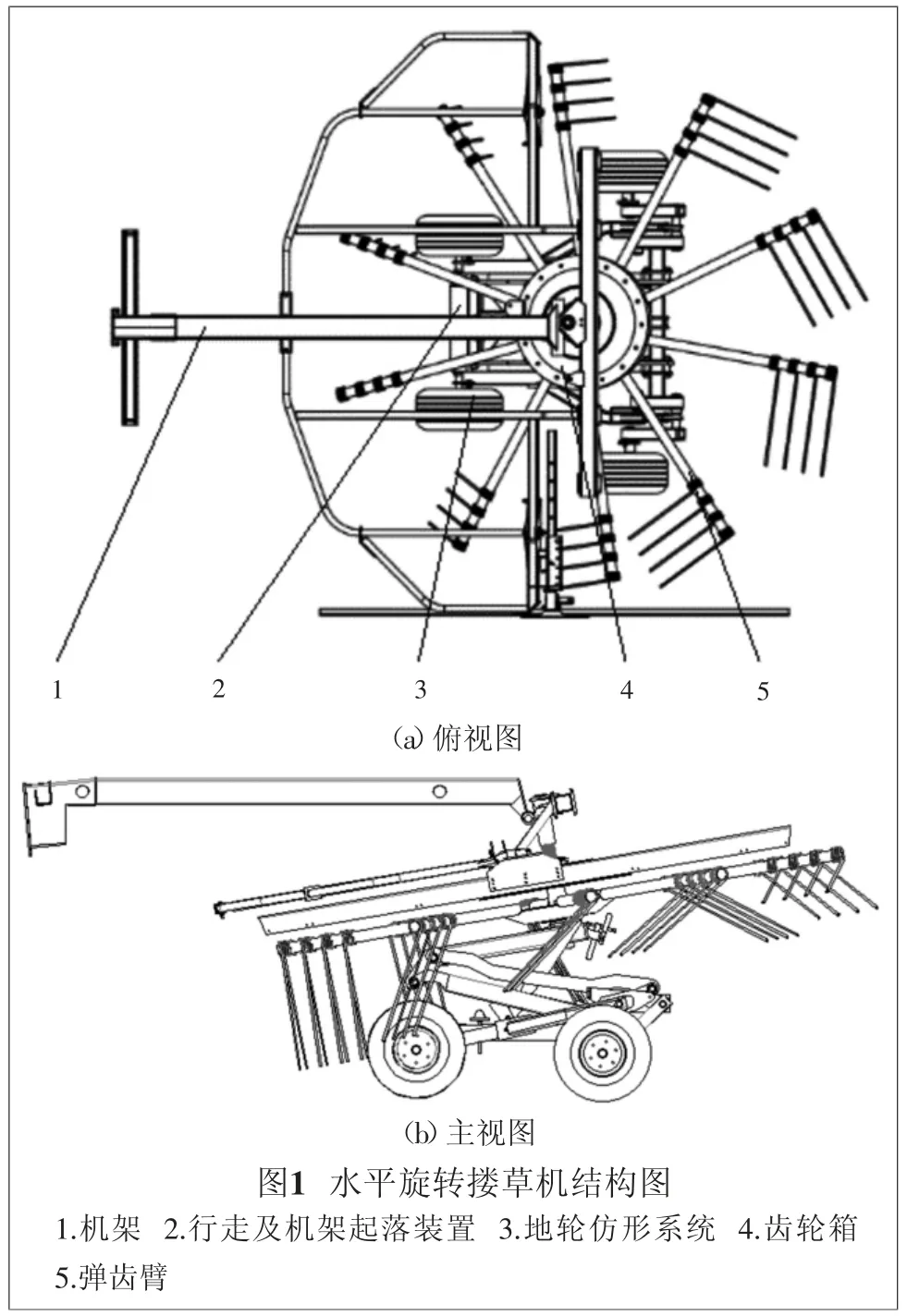
水平旋转搂草机主要由机架、传动系统、弹齿装置、行走及机架起落装置、液压机构和地轮仿形系统等组成,搂草机作业过程中往往会造成牧草营养的损失[4]。
1.2 水平旋转搂草机工作原理
水平旋转搂草机由拖拉机牵引,并通过万向轴将拖拉机动力输出轴输出的动力传递到齿轮箱,带动搂草转子转动,每个弹齿臂随着搂草转子做回转运动,在弹齿臂回转过程中,弹齿臂还会受到凸轮轨道及凸轮罩的限制,使得弹齿臂只能沿着固定的路线和角度旋转,进而使弹齿臂上的弹齿在不同位置按照设计要求转成特定的倾角,并随着转子的旋转完成对牧草的搂集过程[5],其结构图如图1所示。
2 水品旋转搂草机工作速度和弹齿速度分析
水平旋转搂草机在工作时,主要进行两种运动:一种是在拖拉机的牵引下的前进运动;另一种运动是弹齿臂的回转运动。造成牧草营养成分损失的主要因素是弹齿在运动过程中速度过快,弹齿运动速度越慢,造成的营养成分损失越少,但是弹齿的运动速度过慢,会影响搂草效果,漏草率会增大,合理的弹齿运动速度不仅能降低牧草的营养成分损失,还能提高搂草效果。所以严格控制弹齿运动速度对牧草的收集和营养成分的保持非常重要。
2.1 水平旋转搂草机工作速度分析
水平旋转搂草机前进动力靠拖拉机提供,根据经验,前进速度v通常取值为12 km/h,但是在实际搂草过程中,常常需要通过观察地形条件和牧草生长状况,根据操作工人的经验来调节拖拉机牵引速度,进而改变机器前进速度,以此来提高搂草机的工作效率和工作质量。经试验证实,机器最大前进速度不得超过14.5 km/h[6]。拖拉机速度越快代表相同时间内搂过的草场面积越大,适当提高拖拉机牵引速度能提高搂草速度。
2.2 水平旋转搂草机弹齿尖端速度分析
水平旋转搂草机搂草作业时,主要是靠弹齿对牧草进行搂集,而弹齿相对牧草的速度由弹齿臂回转角速度和拖拉机牵引速度共同决定,在搂草过程中,主要是靠牧草之间的相互牵引来达到将散落的牧草搂集成草条的目的。在此过程中,弹齿尖端不与地面直接接触,通常弹齿在工作位置距离地面30~60 mm,在搂草过程中弹齿的线速度有严格的要求,既不能太低也不能太高。因为当弹齿的线速度低于6 m/s时,牧草间的相互制约能力下降,会造成牧草的丢失,漏搂的牧草量会增加;而当弹齿的线速度过高时,弹齿直接撞击牧草,会造成牧草的结构破坏,降低牧草中的营养成分,所以在弹齿工作过程中,需要严格控制弹齿的线速度。根据经验,一般确定弹齿尖端的线速度为10~13 m/s[7]。但是目前生产的水平旋转搂草机都没有变速装置,其转速受到拖拉机动力输出轴的限制,当拖拉机动力输出轴的转速固定时,水平旋转搂草机只能以固定的转速转动。
2.3 水平旋转搂草机弹齿轨迹分析
2.3.1 最外侧弹齿轨迹分析
在水平旋转搂草机工作时,弹齿的运动主要是由搂草机直线运动和弹齿臂的回转运动决定,其轨迹可看作是一个匀速直线运动和圆周运动的合成运动[8],设最外侧弹齿的轨迹坐标为(x0,y0),回转半径为a,回转角速度为ω,前进速度为v,则其最外侧弹齿轨迹方程为:

最外侧弹齿运动轨迹如图2所示。
2.3.2 同一弹齿臂上最内侧和最外侧弹齿轨迹分析

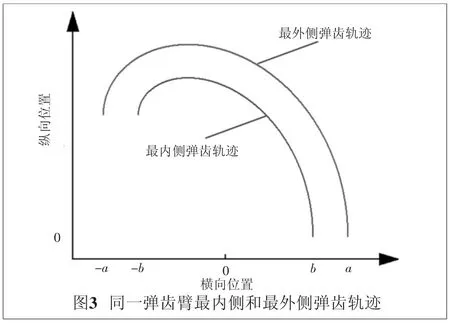
现研究同一弹齿臂上的最外侧弹齿和最内侧弹齿的运动,对于最内侧弹齿的运动只有回转半径一个参数与最外侧弹齿的运动参数不同,设最内侧弹齿的回转半径为b,则其最内侧弹齿轨迹方程为:

同一弹齿臂上的最内侧和最外侧弹齿运动轨迹如图3所示,其中两条轨迹之间的区域为有效搂集区域[9]。
为了研究相邻两个弹齿臂上弹齿运动的规律,首先对同一弹齿臂上的内外两侧弹齿的运动情况进行研究,找出两侧弹齿在一个工作循环中的最大纵向位置。首先对式(1)、式(2)进行隐式求导,可得:

令上面2个导函数为0计算驻点位置,以找出最大纵向位置对应的横向位置,令式(3)为0,即

解得

令式(4)为0,即

解得

将式(6)、式(8)分别代入到式(1)、式(2)中可得,x0=-v/ω、x1=-v/ω,所以同一弹齿臂上的最外侧弹齿和最内侧弹齿轨迹的最大纵向位置对应的横向位置相同,都为x=-v/ω。
2.3.3 相邻两个弹齿臂上弹齿轨迹分析
水平旋转搂草机在工作时,每个弹齿臂单独研究时,其弹齿运动轨迹与上面的研究结果相同,研究其连续时只需在后面弹齿运动过程加上对应的时间差n·2π/(Zω),n=1,2,3……。后弹齿臂上的最内侧和最外侧弹齿轨迹分别可以看成前一弹齿臂上最内侧和最外侧弹齿轨迹纵向向上平移v·2π/(Zω)得到(其中,Z为单个回转转子上的弹齿臂数量)。当拖拉机牵引速度较慢、弹齿臂回转速度较快时,相邻弹齿臂上弹齿轨迹如图4所示,通过图4可知,相邻的两个弹齿臂上弹齿搂集区域有较大的重合部分,搂集效率较低;当拖拉机牵引速度较快、弹齿臂回转速度较慢时,相邻弹齿臂上弹齿轨迹如图5所示,通过图5可知,相邻的两个弹齿臂上弹齿搂集区域有漏掉的部分,说明该区域没有被搂集过,漏草率升高。
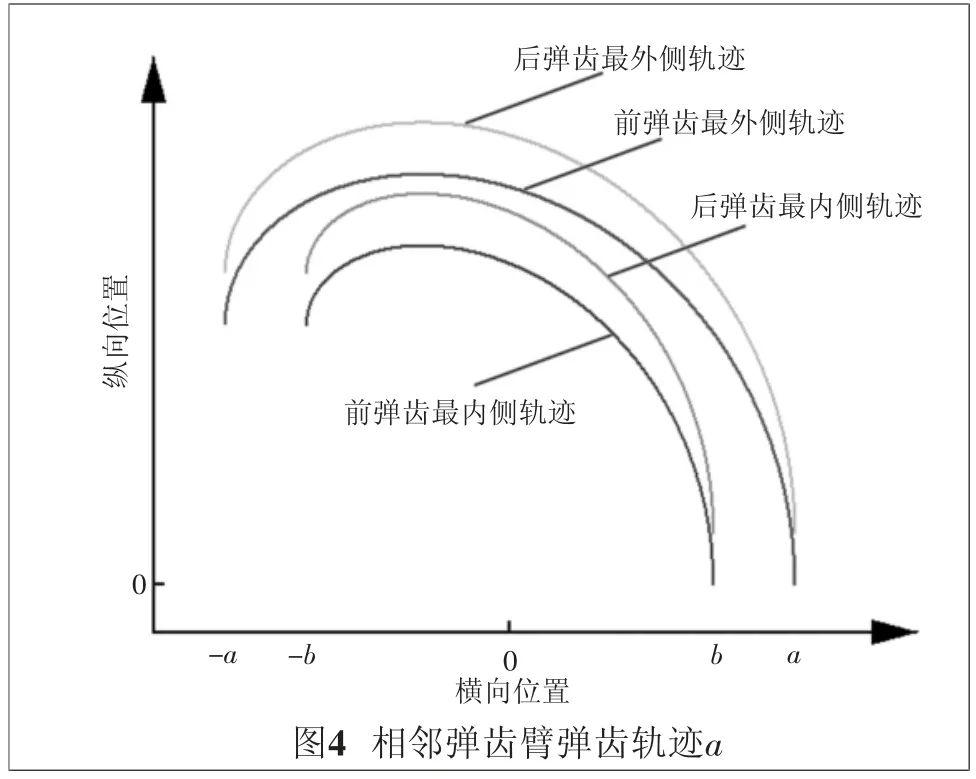

当前弹齿臂最外侧弹齿轨迹与后弹齿臂最内侧弹齿轨迹相切时,两个弹齿臂上弹齿的搂集区域恰好没有重合部分,也没有间隙,说明此时既没有重复搂集,也没有漏掉牧草,此时为水平旋转搂草机的最佳工作状态。现建立前弹齿臂最外侧弹齿轨迹与后弹齿臂最内侧弹齿纵向位置轨迹方程,前弹齿臂最外侧弹齿轨迹方程为

后弹齿臂最内侧弹齿轨迹方程为

令式(9)、式(10)在x=-v/ω处相等,整理得到
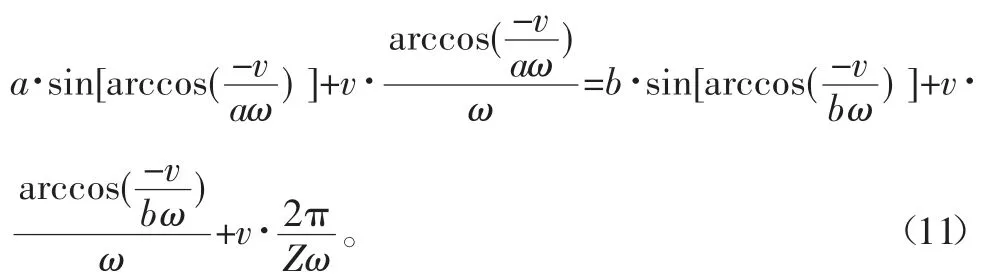
式(11)即为水平旋转搂草机转速与牵引速度最佳配合公式。该公式可以计算出与不同转速配合的最佳牵引速度,保证较低的漏草率的同时提高搂草效率。
运用9LS-6.2型水平旋转搂草机的参数验证公式,并给出该机型的回转速度与牵引速度的配合方案,9LS-6.2型水平旋转搂草机的参数如表1所示。
9LS-6.2型水平旋转搂草机每个转子上有10个弹齿臂,每个弹齿臂上有4个弹齿,最外端弹齿回转直径为2.8 m,最内侧弹齿的回转直径为2 m,将各项参数代入到式(11),解得该型号搂草机的最佳前进速度为14 km/h,与实际工作时的最佳速度相近,说明该公式对水平旋转搂草机工作速度和回转速度的匹配具有一定指导意义。
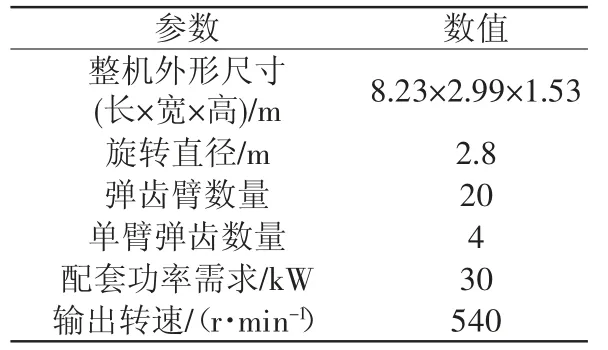
表1 水平旋转搂草机参数表
3 结 论
采用了解析法与Matlab仿真方法分析水平旋转搂草机的弹齿运动轨迹,得出了以下结论:1)通过对单个弹齿、单个弹齿臂上最内侧和最外侧弹齿和连续弹齿臂上最内侧和最外侧弹齿的运动进行分析,得出了水平旋转搂草机牵引速度与回转速度的最佳配合方案;2)现有机型可根据公式计算回转速度和前进速度,可降低漏草率,提高工作效率;3)在后续新机型的优化中,可以在拖拉机动力输出轴与水平旋转搂草机之间安装变速器,使水平旋转搂草机根据操场条件改变牵引速度后,能调节弹齿臂的回转速度,使回转速度与牵引速度达到最佳配合方案,为新机型的研制提供了一个新方向。
