基于卷积自编码网络的杆塔点云数据自动分类方法
2020-03-27赵李强
赵李强
(昆明能讯科技有限责任公司,昆明 650217)
0 前言
目前我国已经进入工业化全面发展的时期,各行各业对电力资源的需求随着工业化进程的推进在逐渐增大;在我国电力资源主要集中分布在中西部地区,而经济发达的区域却集中分布在东部沿海地区,要打破电力资源和经济发展分布不均匀的现象,只能通过大容量远距离输电系统来实现。采用高压、超高压输电系统是实现长距离输送电力能源的主要方式。超高压大容量输电线路大幅度扩建后,维护超高压输电线路的安全稳定运行是我国经济建设高速增长的坚实基础,高质量高频率的巡检运维是保证大规模输电系统的稳定运行的必要条件。人工巡检容易受到地形、人员和天气等因素的影响,往往导致巡检效率低下、巡检效果欠佳,这种人工巡检的方式已经无法满足新时代下电力事业发展的需求[1]。在生产实践急需高效巡检方法的背景下直升机巡检技术孕育而生,直升机作为一种新的输电线路巡检工具在20 世纪50 年代开始出现在欧美等发达国家[2],而国内直升机输电线路巡检方式是进入21 世纪后才开始出现。直升机搭载激光探头和可见光成像设备可以获取到输电线路上部件的三维坐标信息可以被用来进行测距进而对输电线路上的树障等隐患给出预警报告,也正是由于其巡检效率高、操控方便、维护简单等特点,逐步开始应用于测绘、电网规划、灾害应急响应、线路架设、安全监测等电力系统任务之中[3-4]。
杆塔是输电线路系统中的主要部件,它是输电走廊中的节点部件。我们可以根据杆塔的类型判断出输电线路的各种属性,也可以通过杆塔为起点定位出与杆塔相关联的各种部件,如绝缘子串,导地线,间隔棒,防震锤,线夹等。所以准确的识别出杆塔类型对于实现输电线路的自动化巡维有着重要的意义。Charles R. Qi 等在文献[5] 中提出通过深度层次特征的方法来检测点云数据中的目标物体,但是由于深度神经参数过多而不能对所有的点云数据进行处理只能对点云数据进行抽稀,导致原来点云数据中包含的信息大量丢失;其次深度神经网络计算量太大严重影响了这种方法的工程化应用;吴登禄等在文献[6]中提出使用深度神经网络的方法来识别室外场景中的物体目标,该方法在使用点云数据检测出点云中的物体后在算法中添加了一些后处理的算子虽可以提升一定的识别率但是增强了算法的时间和空间复杂度。我们在本文中提出了一种基于卷积自编码网络的杆塔点云数据自动分类方法,算法流程如图1所示。本文的组织架构如下,第一部分我们简要的论述了输电线路巡检的重要意义以及点云数据目标检测识别技术的发展现状;第二部分我们详细介绍了我们所提出的杆塔点云数据分类算法;第三部分我们给出了实验结果及分析;第四部分我们进行了简单的总结。
1 杆塔点云自动分类算法
通过激光雷获取的三维点云数据为计算机理解目标物体提供了新的视角,使我们能够获取到各种物体的世界坐标信息为准确判断物体之间的位置关系提供了强有力的依据,通过激光点云数据我们可以实现输电线路上的自动树障缺陷分析;近年来由于计算机硬件性能的不断提升和机器学习算法理论体系的日趋完善,使得深度学习技术得到了极大的发展。深度卷积神经网络的应用已经渗透到了我们日常生活的各个方面,车牌识别、人脸识别技术的成功应用给我们的生活带来了很多便捷。自编码神经网络作为非线性降维工具是对PCA 线性降维工具补充,通过卷积自编码神经网络我们能够提取到图像中的非线性特征,使用这些特征我们就可以实现对图像数据的无监督分类;现实世界中的数据按照机器学习的类型来分有标注的数据(对应于监督学习)和无标注数据(对应于无监督学习),其中有标注的数据只是总数据中的冰山一角,在工程实践中我们主要面临的是无监督数据,所以对无监督学习方法研究有着非常重要的意义,常见的无监督学习方法有kmean 聚类,高斯聚类,混合高斯聚类,均值漂移聚类,EM 聚类。在本文中我们提出了一种基于卷积自编码神经网络和EM 聚类算法实现对杆塔点云数据进行自动化分类的方法。我们首先对点云数据进行底面投影实现方向校正,然后再正面和侧面投影生成杆塔图像;第二、将收集的杆塔图像组成数据集对VGG16 结构的卷积自编码网络进行训练,提取网络中的编码部分;第三、将杆塔图输入到编码网络中获取到特征向量,将特征向量输入到EM 分类器中实现自动分类。
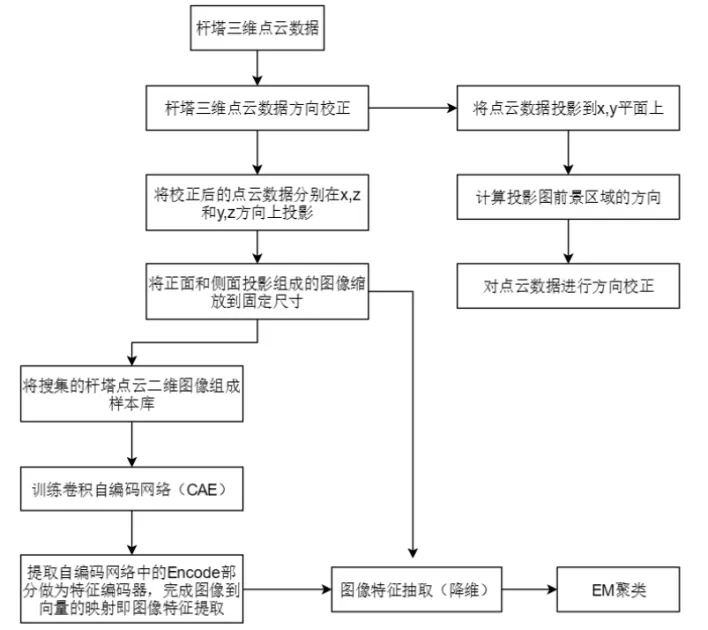
图1 杆塔三维点云数据自动分类算法流程图

图2 杆塔点云数据在xy平面内的投影图像及 旋转平移后的图像
1.1 杆塔点云图像的获取
深度神经网络参数过多不适合处理大规模的点云数据,在本文所提出的算法中我们采用的方法是将三维的点云数据投影成图像。由于激光雷达在扫描杆塔的时候,不能保证扫描平面都是平行于杆塔的正面,故杆塔点云与世界坐标系之间存在夹角,我们需要将杆塔点云的坐标进行旋转平移使杆塔点云外接椭球的各轴与世界坐标系的各轴近似平行。
杆塔点云数据由世界坐标系到图像坐标系的投影公式如下所示:

其中x,y,v 分别代表的是图像坐标系中的宽、高和像素值,X,Y,Z 分别代表点云数据在世界坐标系中的坐标。在激光雷达对户外的杆塔进行扫描时不可避免的带入噪声,如杆塔底部的基座,这将对我们的后期分类带来干扰,为了消除这种干扰我们对v 值进行了截断。我们使用投影图像中的前景像素点拟合直线,用直线的倾角来代表杆塔投影图像的方向如图2 左图中红色直线所示,图2 右图为旋转后的投影图像。
1.2 图像特征自动提取
激光雷达获取到的输电线路点云数据是海量的无标注数据,这些数据无法使用监督学习的方法进行处理,故在本文中我们提出了通过无监督分类的算法对其进行处理。为了提取到好的图像分类特征我们采用了卷积自编码神经网络,我们使用收集的大量杆塔投影图像对CAE 网络进行训练,然后使用自编码网络部分对输入的投影图像进行降维得到分类特征向量。杆塔投影图像的自动特征提取算法流程图如图3所示。
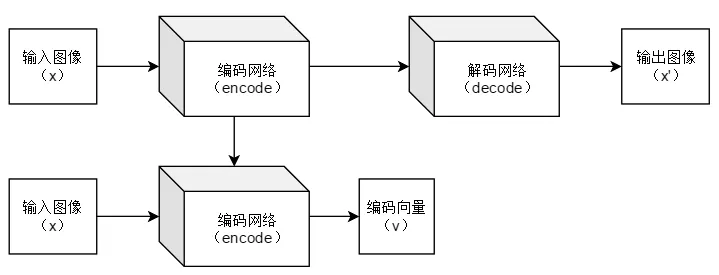
图3 杆塔投影图像的自动特征提取算法流程图
1.3 图像自动分类
正态分布(Normal distribution)是一个在数学、物理及工程等领域都非常重要的概率分布,在统计学的许多方面有着重大的影响力。若随机变量X 服从一个数学期望为 μ 、标准方差为6 的高斯分布,记为:

则其概率密度函数为:

正态分布的期望值μ 决定了其位置,其标准差σ 决定了分布的幅度。我们假设每一个杆塔投影图像的编码向量v 服从某一高斯分布,我们通过输入的向量v 与已有的杆塔投影图像向量高斯分布进行欧式距离匹配,我们寻找匹配距离小于杆塔的实际边长和距离最小的分布作为匹配结果,如果没有满足匹配条件的杆塔分布存在那么我们就以当前输入的向量作为均值,产生一个新的分布即找到一个新的杆塔类别。
2 实验结果和分析
我们在ubuntu1804 64 位上使用tensor f low 1.12、python3.6、Qt 和GCC 编 译 器 实 现 了本文中所提出的算法。硬件环境为:Intel(R) Core(TM) i5-8300U CPU @ 2.3 GHz 2.3GHz, 8.00GB 内存,RTX 2060 6 G 显存。我们使用直升机搭载的激光雷达对4 条220 kV 和6 条500 kV 的输电线路进行了扫描巡检,一共获取到了1302 级杆塔,共包含5 种杆塔,并使用本文提出的算法对其进行了测试。杆塔点云数据分类中正面和侧面投影图,如图4 所示,我们使用VGG16 的网络结构作为编码器对图像进行了降维,将输入图像先缩放到300*400 再降到512 维,最后进行自动聚类。我们对数据进行了随机抽样将数据划分为训练样本集(1032)和测试样本集(270),分类结果如表1 所示:

表1 卷积自编码网络杆塔点云自动分类算法性能分析
在测试图像集上,我们记录了270 个目标的分类结果如表1 所示,算法的正确识别率为:270/270 = 100%,识别错误率为:0%,从以上的数据中我们看到在我们的测试数据集上面本文的算法可以达到100%的正确率。
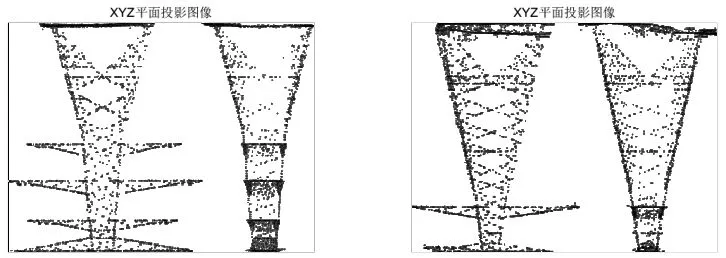
图4 杆塔点云数据正面侧面投影图
3 结束语
本文提出了一种基于卷积自编码神经网络的输电线路杆塔点云数据自动分类方法,通过对点云数据进行投影和直线拟合计算出点云数据旋转角度,对点云数据进行旋转平移校正,之后在正面和侧面上投影等到杆塔点云的投影图像;利用杆塔点云图像数据对基于VGG16 结构的卷积自编码网络进行训练,提取出其中的自编码部分作为特征提取器,实现对输入图像的降维编码;最后使用EM 聚类算法对杆塔点云图像的向量进行自动分类。实验结果表明本文的算法可以实现对杆塔点云数据的自动分类,运行效率可以达到实时性的要求;本文的工作也是对无监督机器学习的一种探索。
