一种自适应弯扭变胞水果采摘器设计
2020-03-25高玉杨贺绪李树军宋明燕张国圣
高玉 杨贺绪 李树军,2 宋明燕 张国圣
1.宁夏理工学院机械工程学院; 2.东北大学 机械工程与自动化学院
一、引言
在水果生产周期中,采摘是最后也是最耗时费力的一个环节,但由于采摘环境的复杂性,导致采摘环节的机械化程度不高,多数是人力手工采摘,高枝水果采摘通常需要借助梯子、摇臂式升降机构等辅助器具,或者通过振动和敲打树枝使其自然下落,整体工作效率低、对水果损伤率大,还具有一定的危险性。因此,设计一种简单易行的高空水果采摘器尤为重要。
二、国内外水果采摘器现状分析
(一)国外水果采摘器发展现状
20世纪60年代,美国学者 Schertz和 Brown首次提出应用机器人技术进行果蔬收获,当时开发的机器人样机几乎都需要人的参与,只能算是半自动化的收获机械,且无法进行选择性收获。从20世纪80年代中期开始,随着工业机器人技术、计算机图像处理技术和人工智能技术的日渐成熟,以日本为代表的西方发达国家都在水果采摘机器人方面做了大量研究工作,试验成功了多种具有人工智能的收获采摘机器人,应用机器人技术进行水果的自动化收获得到了快速发展[1]。
(二)国内水果采摘器研究现状
目前我国研发的水果采摘器有上百种,包括机械式、电动式、气动式等,有的仅可实现单方向水果采摘,有的可改变方向以实现全方位水果采摘。其中,大型水果采摘机因价格昂贵且占地较大不适用于个体农户,果农多倾向于选择小型简易水果采摘器,但多数小型简易水果采摘器仅以拉力分离果柄与树枝,不能提供果柄与树枝分离所需的扭转力,不符合人手采摘原理,容易造成水果内、外伤,影响果品质量,且不利于保鲜储藏,从而影响经济效益[2]。因此,急需设计一种符合人手采摘原理的水果采摘器。
三、水果采摘器设计
(一)水果采摘原理研究
水果在采摘过程中的基本受力有拉伸、扭转、剪切、碰撞等。经过水果采摘者的多年采摘劳动经验,总结出了一套较为实用的水果采摘原理:在采摘过程中用手指轻轻握住果实——夹紧,食指按住果柄——旋转,其他手指配合拇指施加力使果柄与树枝受剪切而断开——扭转,取下果实,如图1所示。本设计以苹果采摘为例,设计一款结构简单、操作简便、省力、不伤果实,且制造成本低的新型水果采摘器,也适用于橘子、梨等水果的采摘。
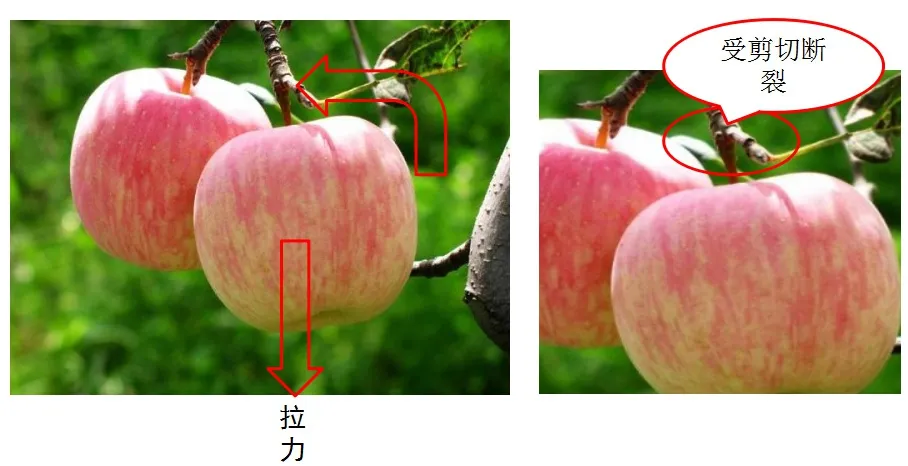
图1 水果采摘原理示意图
(二)水果采摘器设计
本设计的目的在于解决现有技术中仅依靠拉力或剪力采摘水果的缺陷,设计出一种自适应弯扭变胞水果采摘器,由提供夹持和弯扭运动的凸轮机构、带动凸轮机构平动的平行四边形传动机构、支撑机构和牵引驱动机构等组成,巧妙利用变胞原理[3-4],仅通过单一驱动就可根据采摘工艺过程使两组机构自适应切换,实现对水果尺寸和形状的自适应调整和锁紧果实,并在采摘过程中提供所需的拉力和弯扭力,完全符合人手采摘原理,操作简单、工作可靠、经济性好。
1.水果采摘器结构组成
自适应弯扭变胞水果采摘器左右对称,由机架(撑杆)1、导杆2、从动杆3、L型摇杆4、短销5、摇杆6、连杆7、长销8、弹簧9、小销钉10和皮碗11构成。其中:导杆2与机架(撑杆)1通过滑动副连接;从动杆3一端和导杆2通过铰链连接,另一端和L型摇杆4利用小销钉10连接;L型摇杆4通过小销钉10与机架(撑杆)1连接;摇杆6通过长销8与机架(撑杆)1连接;短销5安装于L型摇杆4上;弹簧9一端安装于长销8上,另一端安装于短销5上;连杆7下端通过小销钉10分别与L型摇杆4和摇杆5连接,上端与皮碗11通过球面副和槽销副连接,构成一凸轮机构;机架(撑杆)1、L型摇杆4、摇杆6和连杆7构成一平行四边形机构。具体结构组成如图2、图3所示。

图2 结构组成视图(一)
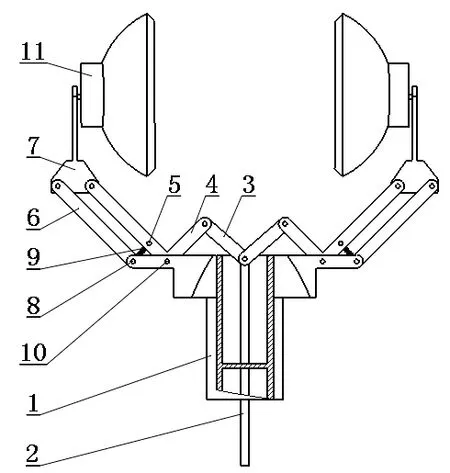
图3 结构组成视图(二)
连杆7上端销杆与球头结构如图4所示。皮碗11的槽副是一段圆弧,与皮碗几何中心距离为L,球槽与该段圆弧相切,长度一致,如图5所示。
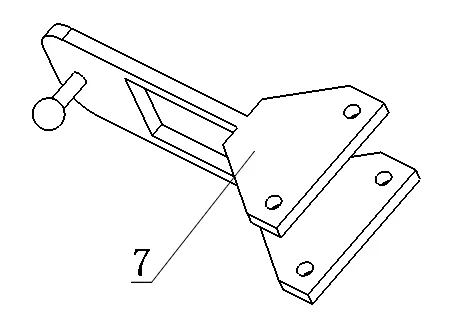
图4 连杆7结构图
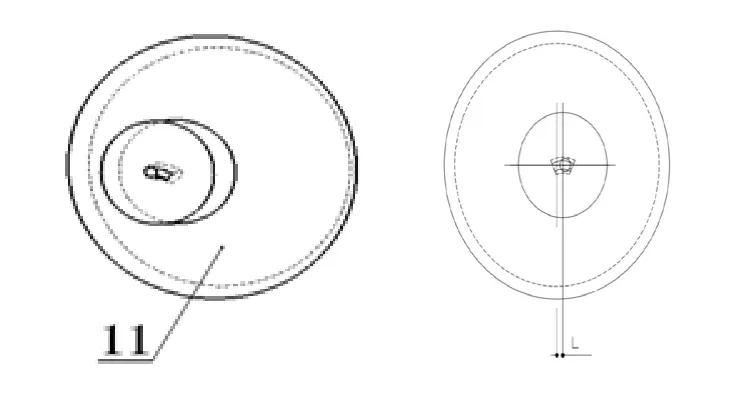
图5 凸轮结构11图
2.水果采摘器工作过程
自适应弯扭变胞水果采摘器具体过程如下:机架(撑杆)1下端驱动部分握于采摘者手中,用于支撑和调节采摘器位置,便于皮碗11锁住水果,同时减轻了机械臂末端的重量。导杆2下端通过可调节的钢丝与手柄连接,驱动采摘器完成水果采摘。非工作状态下,采摘器执行部分在弹簧9的拉力作用下处于张开状态。采摘时,驱动手柄,导杆2在钢丝拉力的作用下动作,使从动杆3驱动L型摇杆4绕着小销钉10处的转动轴转动,摇杆6和连杆7随之动作,向中间靠拢,皮碗11慢慢靠近水果,与水果接触。L型摇杆4、摇杆6和连杆7继续摆动,皮碗11根据水果形状和位置利用其球面副自适应调整方位直至两个皮碗11锁紧水果,弹簧9被拉至最长。此时由机架(撑杆)1、L型摇杆4、摇杆6和连杆7构成的平行四边形机构自由度变为0,连杆7和皮碗11组成的球面副(如图4所示)自由度由3变为1,槽销副自由度为1。锁紧水果后,向下轻拉机架(撑杆)1,拉力与皮碗11几何中心距离为L,产生转矩,皮碗绕着球面副转动(如图4所示);与此同时皮碗11沿着槽销副滑动,即凸轮机构开始运动,使果柄与树枝连接部位产生弯扭效应,如图6所示。
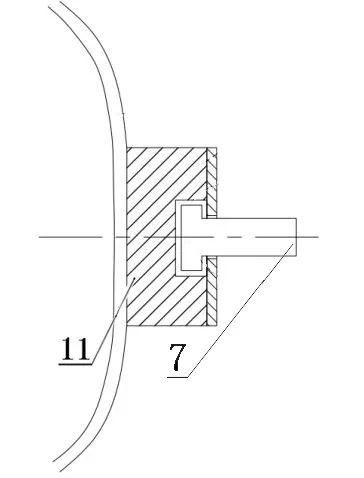
图6 连杆7和皮碗11组成的球面副剖面图
四、结束语
本设计是全机械结构,无需外接电源、传感器之类的装置,完全符合人手采摘原理,保护果梗自然断裂,具有结构简单可靠、成本低廉,携带方便、易损件更换方便等优点,主要创新点如下:
1.本设计提出一种新型变胞机构,即连杆-凸轮变胞机构。连杆机构实现采摘夹持构态,凸轮机构实现采摘翻转构态。2.该变胞机构可以提供水果采摘过程中的所需的拉力和扭转力,并实现夹持、拉、扭力的机械自适应。结构简单、效率高、实用性强。3.利用皮碗和自由度为零的平行四边形机构夹持使水果表面受力均匀,防止果实受损,提高果实质量。4.巧妙利用凸轮机构在重力作用下能使果实一直保持自适应状态,当施加拉力时用凸轮弧形滑槽使其用很小的力即可实现果实自动扭转完成采摘动作。
