多转子离心抛雪机的机械结构设计
2020-03-24李艳龙徐朝阳李文龙王玉博
李艳龙,徐朝阳,李文龙,王玉博,杨 虎,陈 雪
(北华大学 机械工程学院,吉林 吉林 132021)
在我国东北方地区,每年都有大量降雪[1],给人们的正常出行带来很多不便,目前除雪大多以人力为主,近年来,随着机械化的兴起,国内外出现很多除雪机械[2],使用较多的是用于公路、街道、广场等大型场所的重型除雪机[3],该类机器效率高,操作方便,但也存在体积大,不能针对小范围区域作业等缺点,我国人口居住密集,道路较窄,除雪多以城镇为主,为此小型抛雪机将会受到家庭用户的青睐.
现今市场上出现了很多小型除雪机[4],其大多数体积小巧,功能强劲,此类抛雪机一般用于小区、公园等小范围区域,其工作时只需清理出一条道路即可.而现有的除雪机也存在很多弊端,除雪机只设有一个离心转子和铲雪桨配合使用,在清雪时容易留下盲区,抛雪过程无法进行定点抛射,在工作区域时常会有坚硬物体(如石头,砖块)极易对铲雪桨造成破坏.针对以上缺陷,本文设计一种智能化的抛雪机,使用效率高,可以解决目前除雪机的技术弊端.
1 多转子离心抛雪机方案设计
多转子离心抛雪机由汽油机提供动力,汽油机连接驱动轮进行前进,并由使用者把持扶手进行操控,机器正常工作时,由位于机器前方的铲雪桨将雪聚集卷入离心风机处,并通过离心转子高速旋转产生的压强差将雪进一步抛出,抛雪管位于机器后方采用可弯曲设计,以实现小范围内的定点抛射.由于抛雪机工作区域时常伴随障碍物出现,为延长铲雪桨寿命,铲雪桨可以进行高度调节,当遇到障碍物时,铲雪桨会在控制系统作用下进行高度调节,铲雪桨轴通过在转动轨迹内旋转以达到高度调节目的,此外抛雪机整体外部均设有外壳进行保护.
2 集雪系统结构设计
集雪系统由铲雪桨、离心转子、桨片保护壳构成,主要包括铲雪桨“集”雪和离心转子“吸”雪两个过程,抛雪机采用三组铲雪桨和离心转子配合(如图1所示),由汽油机带动铲雪桨轴旋转,抛雪机在除雪时,由铲雪桨[5]把雪打散处理,打散后的碎雪通过三组对称安装的铲雪桨片集中于离心风机处,由于抛雪机不断前进,积雪逐渐增多,在离心风机的作用下,散雪会陆续进入离心管道处等待抛雪系统处理.
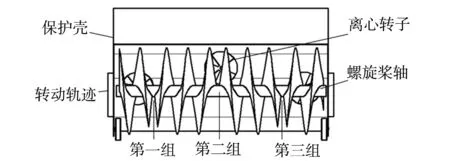
图1 三组铲雪桨、离心风机示意图
2.1 多组铲雪桨设计
抛雪机设有三组铲雪桨,每组均采用对称设计,通过汽油机带动铲雪桨轴使铲雪桨高速旋转,铲雪桨采用螺旋状设计(如图1所示),能够高效的将雪向对称轴处聚集并进行“卷起”,以便于离心风机的“吸入”.
2.2 多转子设计
转子是指离心风机的离心转子[6],当铲雪桨将雪卷起后,雪会随着铲雪桨旋转而进入离心风机处,通过离心转子高速旋转产生压强差,将雪进一步“吸入处理”,抛雪机设有三组离心转子,与铲雪桨对称轴在位置上一一对应,更好的将雪由“卷起”到“吸入”,减少盲区,提高效率.
离心转子采用三叶片式设计(如图2所示),叶片呈曲面状,更大程度的产生风力,叶片由电机进行驱动,抛雪机叶片直径120 mm,叶片厚度为45 mm.
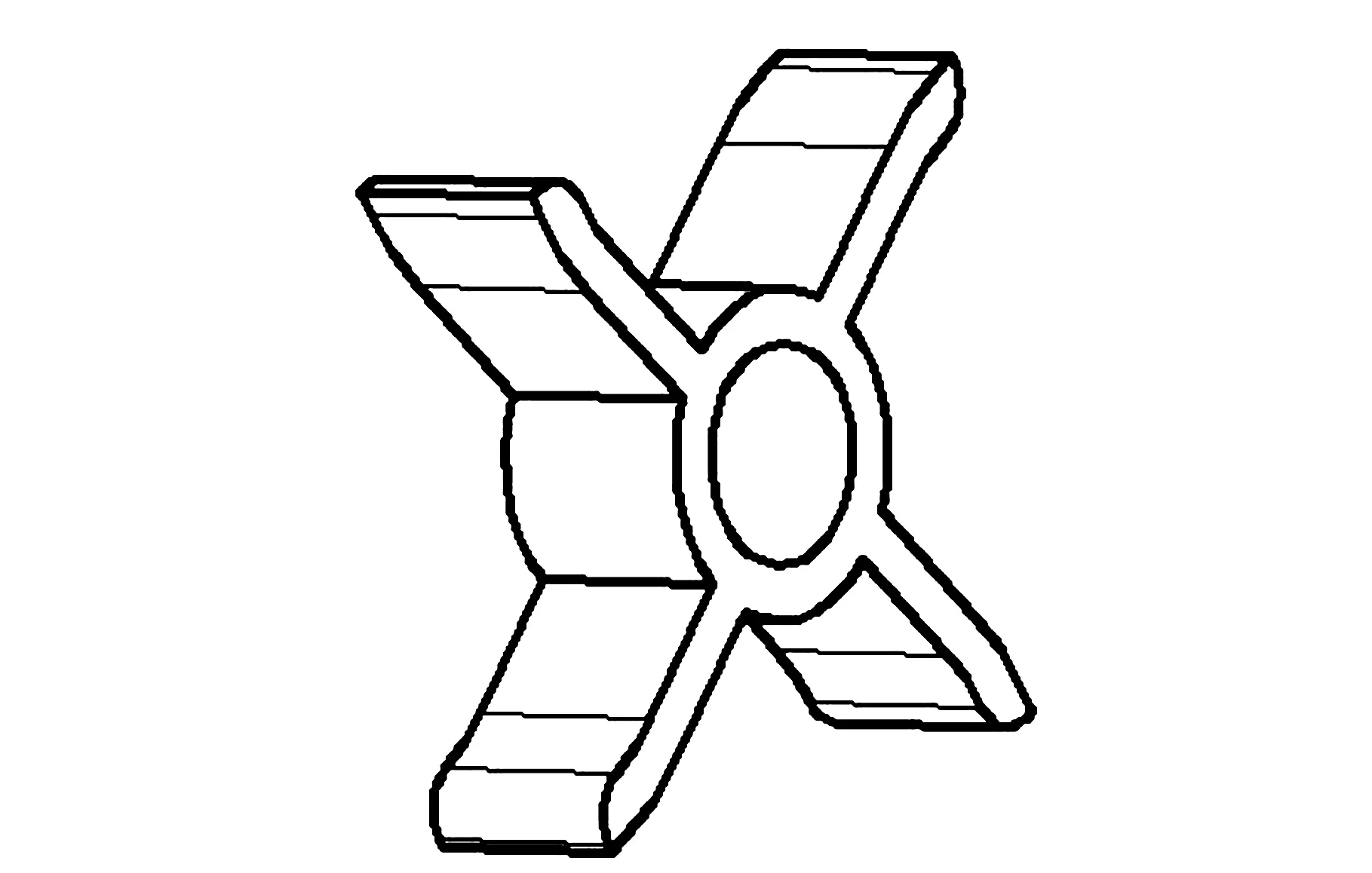
图2 离心转子示意图
离心风机叶片是抛雪机的吸雪工具,不同规格的叶片抛雪能力不同,需求的功率也不相同,按公式(1)计算的抛雪功率所得值与实际结果较为接近,原文献中介绍的公式已经经过实际测试验证,机械效率等问题已经考虑在内.
计算公式如下:
(1)
V2=d2n2/60
(2)
式中:ΡB为叶片消耗功率(kw);μf为雪与钢板的动摩擦系数;K2为叶片形状系数;ρ为雪密度;Qb为叶片体积,d2为抛雪管长度;ε为积雪密度变化系数;V2为叶片线速度(m/s);n2为叶片转速(r/min).
3 抛雪系统设计
本抛雪机工作环境大多为小范围场所,能够清理出一条道路供人行走即可,抛雪机在抛雪时一般将雪抛到路边绿化带为宜,在公路上时使用效果是比较理想的,但是在家里庭院、小区等场合使用时,由于房屋密集,地势复杂,抛雪地点需要谨慎选择,为此抛雪机抛雪筒上部分采用波纹管式设计,可以随意调节抛雪的高度和角度,方便操作者根据绿化带的位置来调节抛雪筒的高度和角度,从而调节抛雪的位置,达到落点可控效果.
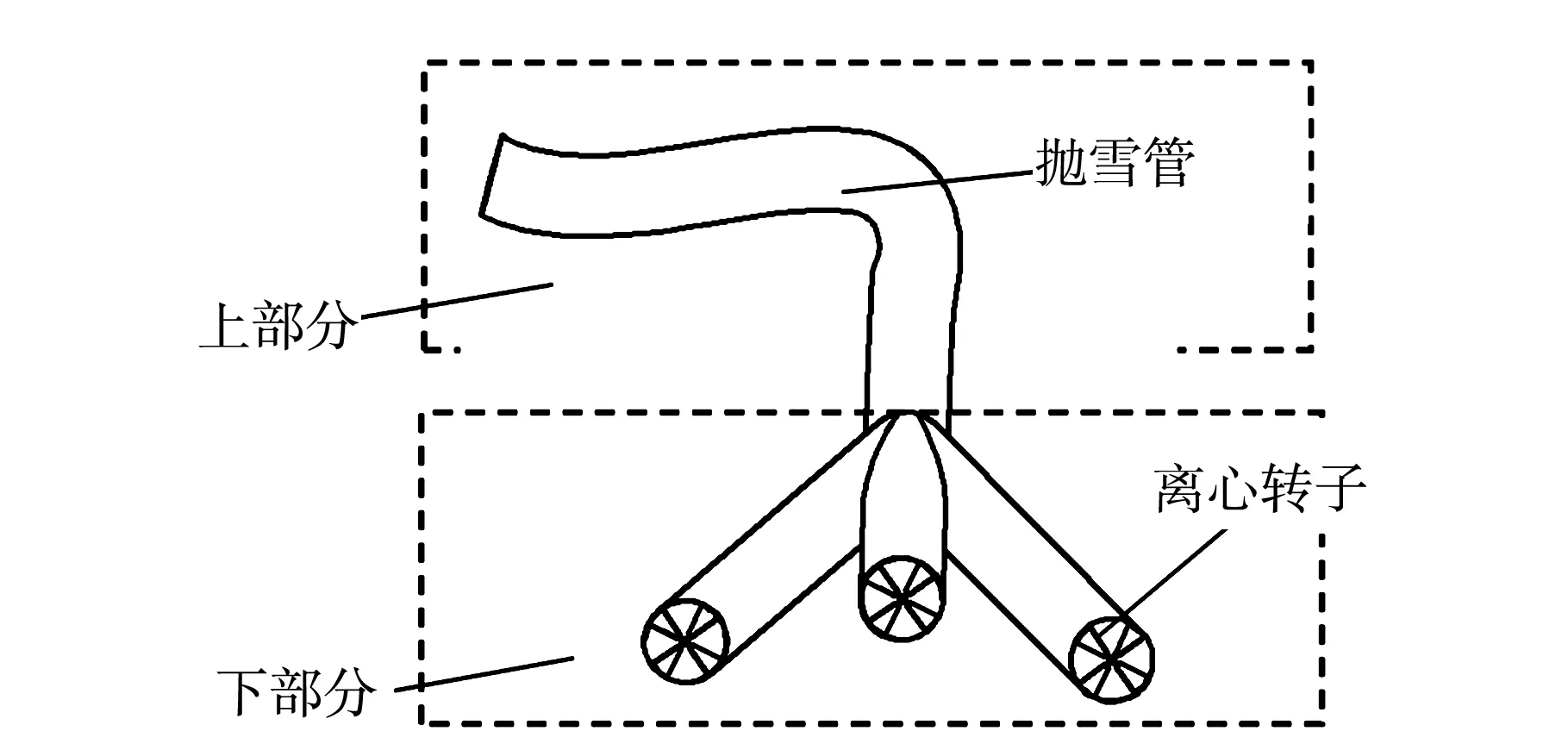
(a) 结构图

(b) 外形图图3 抛雪管示意图
抛雪管分为上、下两部分(如图3(a)所示),下部分设有三个支管,每根支管均设有离心风机,支管后部汇聚成一根总管道,抛雪管上部分采用塑胶材质波纹管(如图3(b)所示),强度较大,能够承受离心转子产生压强差带来的冲击[7],抛雪管弯曲变形可以很快复原,使用寿命强,效果好.为减小雪在其中运动时的阻力,抛雪筒的直筒部分与集雪器的上挡板制成一个零件,连接处以圆角光滑过渡,且材料选用高光洁度、高韧性的玻璃钢.抛雪筒处于集雪器中部,方向应与挡板的半封闭圆筒相切,这个方向雪可以得到充分的初速度后从此抛出.抛雪筒轴线应处于集雪螺旋轴螺旋面中部,这样雪在离开集雪器进入抛雪筒时可少受阻力,为提高抛雪距离,抛雪筒出口处有椭圆状的光滑开口以保证雪在离开抛雪筒转弯时少受阻力.
抛雪距离公式如下:
(3)
V2=πd2n2/60,
(4)
式中:L为抛雪距离(m);V2叶片线速度(m/s);g为重力加速度(m/ s2);φ为抛雪角度;π为圆周率;d2为抛雪管长度;n2为叶片转速(r/min).
当φ=45°时,L取值最大.说明相同的初速度只有在45°斜上抛时抛的距离最远,故扬雪角取45°最合理.
4 智能控制系统设计
抛雪机工作地面大多数凹凸不平,地面时常会有砖头、瓦片等障碍物体[8],抛雪机在工作时螺旋桨高速旋转,极易碰到障碍物,对桨片造成损坏减少寿命,为此本抛雪机设有保护程序,由超声波传感器、步进电机、旋转轨道、铲雪桨轴、单片机程序构成.在螺旋桨轴处设有超声波传感器[9],机器未投入使用以前,通过根据超声波避障模块[10]的深入学习,了解到工作环境中的障碍物特性(以石头、水泥为主),把这些特征输送给传感器以进行后续的识别.在螺旋桨保护壳两侧设有旋转轨道,旋转轨道处连有步进电机,当传感器识别到地面有障碍物时会给单片机控制系统发出信号[11],控制系统带动步进电机开始工作,使旋转轴在旋转轨迹内旋转,以进行高度调节,达到保护桨片的目的.
铲雪桨轴在旋转轨道内往复运动,进而实现对铲雪桨到地面高度的调节(如图4所示).
当铲雪桨越过障碍物时,传感器会将信号再次发给控制程序,步进电机通过反向转动,将铲雪桨回到原始高度,并通过传感器将铲雪桨离地面高度调节为最佳高度,铲雪浆完成高度调节.
5 多转子离心抛雪机整体结构设计
多转子离心抛雪机整体结构如图5所示,主要包括集雪系统、抛雪系统、动力系统和智能控制系统四部分,抛雪机在工作时由汽油机提供能力,采用后轮制动方式,铲雪桨多组设计,减少盲区提高效率,抛雪管采用可弯曲设计,能够对抛雪地点进行小范围内的定点抛射,抛雪机内部设有铲雪桨保护智能控制程序,能够实时保护桨片不受障碍物破坏,抛雪机底盘处设有减震片,外表美观协调,使用便捷高效.
6 结 论
设计了一款适用于小区、公园等小范围区域的小型家用抛雪机,体积小巧,使用灵活,与现有的除雪机器相比,主要优点在于:
(1)采用多组铲雪桨片与离心扇叶配合使用,将碎雪集中到吸雪孔,保证了集雪水平,减少盲区,提高效率.
(2)出雪口处采用塑胶波纹管,能够改变抛雪轨迹,达到小范围落点可控目的.
(3)设有铲雪桨保护控制程序,浆片能够自动避开障碍物,极大程度上减少损耗,增加机器寿命.