高空长航时无人机发动机工作稳定性研究
2020-03-24郭政波申世才姚尚宏
杨 雄,郭政波,申世才,姚尚宏
(中国飞行试验研究院,西安 710089)
1 引言
高空长航时无人机具有部署快速、运行成本低、战场生存能力强等优点,是未来空战、“软”战争的关键武器装备[1]。而作为高空长航时无人机心脏的发动机,其高空稳定性至关重要[2-3]。研究表明,高空长航时无人机发动机在高空工作时,雷诺数会显著减小,稳定裕度降低,易发生喘振故障,给压缩系统的正常工作带来不利影响[4-5];同时,雷诺数降低也会影响发动机涡轮的流通能力及性能[6];在高空低速条件下,发动机燃烧室的工作稳定性也会显著降低[7]。
根据无人机的不同任务需求,无人机发动机在设计和试飞环节中需要面对以下问题:①无人机配装有雷达、相机等多种航电设备,发动机的负载及引气量较大,发动机稳定裕度下降;②无人机在高空低速飞行,受进气条件、高空低雷诺数影响,发动机性能下降,主要部件稳定性变差[8]。上述工作稳定性问题是无人机发动机设计的关键,更是发动机能够投入使用、生成战斗力急需解决的问题,也是发动机飞行试验重点考核的内容。
关于发动机稳定性的研究很多。Wassell等[9]研究了飞机高空低速飞行时雷诺数对压气机的影响,郭捷等[4]对无人机喘振点压比修正进行了研究,王进等[10]运用Wassell法建立了高空低雷诺数的修正模型,李国忠[11]利用仿真对小型涡喷发动机的燃油控制系统进行了研究。但关于无人机发动机工作稳定性的研究多集中在雷诺数对压缩系统的影响上,对飞行试验中发动机稳定性变化及其影响的公开报道相对较少。国内在飞的几型高空长航时无人机发动机的试飞经验表明,发动机在高空工作时,不稳定工作情况大多由油气匹配不好造成。
本文针对高空长航时无人机发动机工作稳定性,引入无量纲分析法,从发动机供油特性出发,建立基于发动机供油特性的无量纲模型,对高空长航时无人机发动机工作稳定性进行分析,可为发动机工作稳定性评估、试飞方法设计提供工程参考。
2 高空对燃烧稳定性的影响
无人机高空飞行时发动机进口总压较低,同时高空低速使得燃烧室进口温度低,从而造成火焰稳定工作范围变小[12],如图1所示。

图1 燃烧温度随压比的变化曲线Fig.1 Flameout temperature variation with compressor pressure ratio
发动机实际工作中,混合气的稳定燃烧范围随燃烧室进口气流速度和混合气初温、初压变化。高空长航时无人机飞行高度高、速度小,发动机燃烧室混合气的初温和初压随着飞行高度的增加、飞行速度的减小而降低。同时,大气密度减小,发动机进气空气流量减小,供油量亦随之减小,导致喷嘴前的燃油压力降低,燃油雾化质量变差,主燃区温度降低,使得燃烧室更靠近熄火边界。
燃烧室进口压力和温度降低时,燃烧室稳定工作区域随余气系数的变化而缩小。如图2所示的燃烧室熄火特性(横坐标为燃烧室压力,纵坐标为余气系数),曲线上半段为贫油极限,下半段为富油极限[13]。

图2 燃烧室熄火特性Fig.2 The characteristics of combustor flameout
高空长航时无人机发动机采用主、副油路切换的方式供油。当发动机在巡航高度工作时,发动机燃油需求量小,关闭主油路,由副油路单独供油;在其他状态下,发动机恢复主、副双油路供油,高效保证发动机燃烧室喷嘴处燃油的雾化质量,提高燃烧稳定性。
某无人机由爬升转为巡航高度平飞时,触发了发动机数控系统主副油路切换控制逻辑,供油方式由主、副双油路供油转换为副油路单独供油。此过程中要求发动机工作状态维持恒定,但实际过程中因主油路关断和打开造成了燃油流量跳变,从而导致燃烧室余气系数发生变化,燃烧室稳定工作区缩小。该无人机在巡航高度飞行时,发动机转速减小2%,燃烧室余气系数增大约4%,余气系数随发动机状态的变化非常敏感,因此该型发动机面临着较为严峻的稳定性问题。
影响燃烧稳定性的因素太多,精确计算燃烧稳定边界不太可能,只能通过台架试验进行边界摸底。图3是工程上常用的主燃区负荷与当量比的关系曲线,可以通过主燃区负荷来表征燃烧室的稳定性。主燃区负荷具体计算公式为:

图3 燃烧室稳定性与主燃区负荷和当量比的关系Fig.3 Relationship of combustion stability with primary combustion load and equivalence ration

式中:qma为主燃区空气流量,V为燃烧室进口气流速度,p3.1、T3.1分别为燃烧室进口绝对压力和进口温度。
通过图3和公式(1)可知,随着飞行高度的增加,燃烧室进口压力和温度降低,主燃区当量比减小,主燃区负荷增大,发动机燃烧稳定工作裕度降低。
3 无量纲分析
3.1 无量纲分析法
通过对高空长航时无人机发动机工作特点的分析,该发动机出现不稳定工作情况或熄火或停车时,压气机并无明显的不稳定工作情况出现,故采用压气机特性不能有效分析和评价发动机工作稳定性。鉴于此,借鉴燃油控制业界常用的修正无量纲参数,以无量纲化的供油特性表征发动机的油气匹配性,利用修正的燃油流量与无量纲发动机转速表征发动机的工作稳定性,如图4所示[14]。图中,为经修正的燃油流量(即无量纲燃油流量),为经修正的转速(即无量纲转速),ωFe为燃油流量,p为发动机进口总压,T为发动机进口总温,N为发动机转速,A点、B点分别代表相同无量纲转速下设计工作点和不稳定工作点。该方法可以从油气匹配方向有效分析高空长航时无人机发动机工作稳定性,且方法中的参数均为飞行试验常规测量和易测量参数。因此,可按照常规方法以无量纲的形式绘制燃油流量与转子的工作曲线,且工程上便于实现。

图4 发动机燃油与转速性能的关系Fig.4 Relationship between fuel flow and engine rotation speed ratio
以发动机实际工作的燃油流量偏离发动机设计燃油流量的大小表征发动机的稳定裕度。类似于式(2)以压比定义的发动机喘振裕度[15],基于修正燃油流量的发动机工作裕度定义为式(3)形式。
式中:κ代表基于修正燃油流量的发动机工作裕度。
图5中的富油边界和熄火边界可以通过试验的方法确定。燃油流量与压力的关系可以用公式(4)表达。

式中:FN代表喷嘴流量数,Δpf代表喷嘴上下游压差。
3.2 无人机试飞数据分析
某高空长航时无人机在三种进气条件下起飞时发动机的无量纲化供油曲线如图5所示。可见,无人机在不同大气条件下起飞时发动机的无量纲化供油曲线基本重合,验证了无量纲化的一致性。
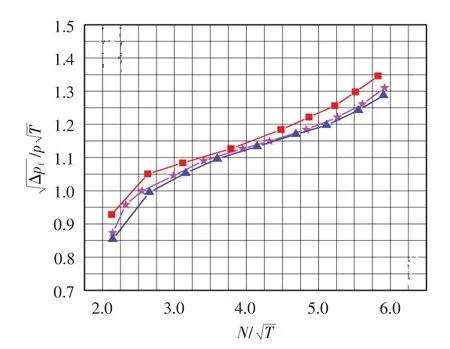
图5 不同进气条件下起飞时发动机的供油曲线Fig.5 The fuel flow curves under different inlet conditions of take-off
对某高空长航时无人机发动机在15 km、17 km及巡航高度停车试飞数据进行无量纲分析,可得到如图6所示的以修正燃油流量表征的发动机工作点。图中,绿色点、紫色点及蓝色点,分别为无人机在15 km、17 km及巡航高度飞行时发动机的稳定工作点,红色工作点为发动机熄火停车前工作点。可见:发动机在各高度稳定工作时,无量纲燃油流量基本为一稳定值,且随着飞行高度的增加,无量纲燃油流量逐渐增大,发动机转速变化引起的燃油流量变化越大,发动机越易进入不稳定工作区。无人机在巡航高度巡航时,发动机稳定工作在蓝色线范围内;无人机在巡航高度停车前,发动机工作点为红色工作点,严重偏离正常工作点,偏离量超过了发动机的稳定裕度,发动机工作不稳定,富油熄火。通过公式(1)~(4)求解可以得到:无量纲转速为5.45时,发动机的富油稳定裕度为26%。
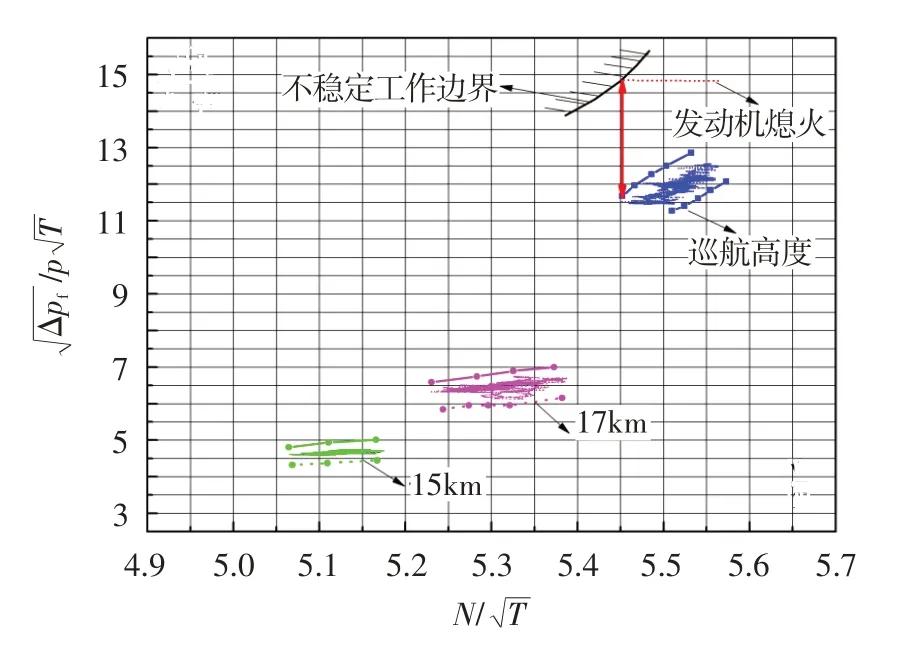
图6 以修正燃油流量表征的发动机工作点Fig.6 The operation points illustrated by correction fuel flow
3.3 无人机主油路通断功能试飞方法分析
基于上述分析方法,对某高空长航时无人机发动机主油路通断功能试飞方法进行分析。该发动机主油路通断的逻辑为:当飞行高度高于某一高度(Akm),且同时副油路压力低于某一值且持续5 s时,发动机控制器切断主油路供给燃烧室的燃油,改由副油路单独供油至燃烧室;当飞行高度低于(A-1)km,或低压转子转速小于85%时,接通主油路,恢复双油路供油。
依据上述通断逻辑,设计了两种主油路关断的试飞方法:①在飞机爬升过程中,发动机保持较大状态,随着飞行高度的增加,副油路压力不断减小,满足条件后主油路关断;②在飞机爬升至任务高度(≥Akm)后改平,缓收油门,副油路压力不断减小,满足条件后主油路关断。
计算两种试飞方法下发动机的稳定工作参数,并绘制得到图7所示工作点。相比于等高度减小状态工作点,等状态爬升时工作点更靠右,离不稳定工作边界更远,说明等状态爬升时发动机的稳定性更高。在进行该无人机发动机主油路通断试飞时,应选择稳定性更高的等状态爬升法。

图7 两种试飞方法下的发动机工作稳定性Fig.7 The operating stability of two flight test methods
4 结论
通过对高空长航时无人机发动机工作条件进行分析,得到了高空低速对发动机燃烧稳定性及供油匹配性的影响,并采用无量纲法对某高空长航时无人机发动机工作稳定性进行了分析,得到以下结论:
(1) 高空长航时无人机发动机在各高度稳定工作时,无量纲燃油流量基本为一稳定值,且随着高度的增加,无量纲燃油流量逐渐增大。
(2) 无人机飞行高度越高,发动机无量纲转速变化引起的发动机无量纲燃油流量变化越大,发动机越易进入不稳定工作区。
(3) 该高空长航时无人机发动机停车时无量纲燃油流量严重偏离正常工作点,发动机富油熄火。无量纲转速为5.45时,发动机的富油稳定裕度为26%。
(4) 相比于利用无人机等高度减小法进行主油路通断试飞,利用无人机等状态爬升法进行主油路通断试飞,发动机的工作稳定性更高。
