面向非机动车生产制造的城市道路路段非机动车换算系数改进方法
2020-03-19仲海鹏
徐 兴,仲海鹏,赵 芸
(1.浙江科技学院 机械与能源工程学院,浙江 杭州 310023;2.浙江科技学院 信息与电子工程学院,浙江 杭州 310023)
0 引言
随着科技的高速发展,汽车社会保有量急剧上升,环境污染与交通拥堵等问题日益严重。电动自行车因为低成本、低污染、省力便捷,成为当下城市主要的交通工具之一,截止到2018年,中国电动自行车社会保有量达2.5亿辆,而且出现了生产制造标准不统一、车辆超标等问题。电动自行车的高频使用加剧了城市道路交通中的机非干扰[1],其在车身尺寸、重量和速度等方面影响非机动车道的通行能力,因此电动自行车的生产制造标准必须参考道路设计参数。为量化电动自行车和自行车对非机动车道通行能力的影响程度,计算城市非机动车的道路通行能力,科学合理地分配道路资源和指导车辆的生产制造,需要精确计算电动自行车相对于自行车的换算系数。
美国《道路通行能力手册》(Highway Capacity Manual,HCM)1965年第2版提出了车辆换算系数的定义:在一定道路和交通条件下,一辆卡车或公共汽车可以用一定量的小汽车来代替,此代替量即为当量小汽车的折算系数[2]。因此,非机动车换算系数定义为在一定相同的道路与交通条件下,单辆电动自行车等效为自行车的数量。国外对自行车换算系数的研究较少,已有的国内外相关研究主要集中在自行车相对于标准小汽车的换算系数。目前没有确定的电动自行车相对于自行车的换算系数,因此有必要进一步研究换算系数计算模型。本文选取城市道路中有机非物理隔离设施的路段,通过分析电动自行车和自行车的交通特性,结合实测数据展开非机动车换算系数的改进方法研究。
1 现有换算系数计算方法
车辆换算系数的核心是交通流中非标准型车辆对标准型车辆的换算,它体现了不同类型车辆对道路资源的占有程度。现有的车辆换算系数计算方法分为理论模型法、经验计算法和计算机模拟法3类[3-4],其中经验设计法是比较常用的计算方法。在非机动车换算系数方面,韩宝睿等[5]根据传统计算方法、动态计算方法、静态计算方法得出电动自行车与自行车的换算系数为1.3,3种方法均通过分析交通流特征参数或参数之间的关系建立车辆换算系数模型;叶晓飞等[6]基于车辆行驶的有效面积和冲突事件数模型提出两种计算模型,得到的换算系数为1.229 5;周旦[7]通过宏观假定非机动车道的通行能力是一个常数,由回归分析得到的换算系数为1.515。综上所述,从微观运动机理方面建立的系数模型在不断完善,但仍存在不足之处。基于以上研究成果,本文结合超车率法与有效面积法,综合考虑个体车辆的运行效率和非机动车交通流的运动特性,确定模型中自行车与电动自行车运动特性的相关参数计算方法。
2 换算模型
2.1 行驶中的有效宽度
非机动车行驶中的有效宽度由车身宽度和客观蛇形宽度组成。陶思然[8]测得自行车的客观蛇形运动摆动幅度范围在36 cm~47 cm之间,取蛇形宽度为40 cm,电动自行车的客观蛇形运动摆动范围在30 cm以内,取蛇形宽度为30 cm。在非机动车交通流中,电动自行车与自行车的主要相互干扰之一就是蛇形宽度的重叠[9-10]。非机动车行驶中的有效宽度示意图如图1所示。

因此,自行车的有效宽度
Wcb=Wlc+Wc。
(1)
式中:Wcb为自行车的有效行驶宽度;Wlc为自行车的车身宽度;Wc为蛇形摆动宽度,取蛇形宽度为40 cm。
同理,电动自行车的有效宽度
Web=Wle+We。
(2)
式中:Web为电动自行车的有效行驶宽度;Wle为电动自行车的车身宽度;We为电动自行车的蛇形摆动宽度。
2.2 行驶中的有效长度——动态车长
车辆在道路上行驶时, 所占用的道路空间不仅为本身所占用的空间, 还包括车辆前方和后方的一段距离,分别称为行驶前距和行驶后距,因此车辆的动态车长[11-12]包括行驶前距、车长和行驶后距。有效长度示意图如图2所示。

自行车行驶中的有效长度
Lcb=L1+Lc0+L2。
(3)
式中:Lcb为自行车行驶中的有效长度;Lc0为自行车的车长;L1为距后车的纵向安全距离,通常取0.5 m;L2为距前车的纵向安全距离,
L2=SC+L0,
(4)
SC为自行车平均速度下的制动距离,L0为安全间距,取0.5 m。
车辆的制动距离指开始踩到制动踏板到完全停止运动的距离,包括制动系统作用时间t1和制动持续时间t2内汽车行驶过的距离。制动距离的影响因素很多,如重量、车型、路面状态和制动启动时间等[13-14]。因为制动力变化不定,反应时间和制动时间难以测定,所以本文将研究对象在不同速度下的制动距离进行数据拟合得到轨迹曲线,从而得到速度与制动距离的关系。
与汽车不同,非机动车的行驶规律不明显,超车和并行现象发生频繁。因此,电动自行车行驶中的有效长度
Leb=L3+Le0+L4。
(5)
式中:Leb为电动自行车行驶中的有效长度;Le0为电动自行车的车长;L3为距后车的纵向安全距离,通常取0.5 m;L4为距前车的纵向安全距离,
L4=Se+η·(Se-Sc)+L0,
(6)
Se为电动自行车平均速度下的制动距离,Sc为自行车平均速度下的制动距离,η为纵向距离冲突影响系数,即一段时间内发生的电动自行车超越自行车次数与通过电动自行车数量的比值,L0为安全间距,取0.5 m。
因此自行车行驶中的有效面积
Scb=Wcb×Lcb。
(7)
同理,电动自行车行驶中的有效面积
Seb=Web×Leb。
(8)
最终,换算系数计算模型为

(9)
式中:Cec为电动自行车相对于自行车的换算系数;μe为相同交通条件下电动自行车的饱和流率(单位:辆/h);Seb为电动自行车行驶中的有效面积(单位:m2);μc为相同条件下自行车的饱和流率(单位:辆/h);Scb为自行车行驶中的有效面积(单位:m2)。
3 换算模型的计算
3.1 选定计算参数值
本文选取杭州市西湖区的主要非机动车停放场,对非机动车的长度、宽度和高度进行实证研究。电动自行车主要分为普通电动自行车和轻摩化电动自行车,如图3所示。

实证研究选取的样本总量为489辆,其中摩托化电动自行车235辆,普通电动自行车132辆,自行车122辆,主要数据如表1所示。

表1 车辆外形尺寸 cm
由上述统计结果可知,自行车与电动自行车差异明显,轻摩化电动自行车与普通电动自行车的差别主要在长度上。根据实际观测,非机动车道流量接近饱和流率时,普通电动自行车的速度与轻摩化电动自行车没有明显区别,两类车的速度分度相差不大。同时各调查点显示,普通电动自行车的行驶占比为19.9%,电动自行车以轻摩化电动自行车为主,因此本文研究将二者一并讨论,进行系数换算时只区别自行车和电动自行车两类,两者的统计如表2所示。

表2 自行车与电动自行车尺寸统计表 cm
根据上述实际测量数据,自行车宽度取58 cm,长度取179 cm,平均蛇形宽度取40 cm;电动自行车宽度取68.5 cm,长度取189 cm,平均蛇形宽度取30 cm,预留安全宽度取50 cm;非机动车道高峰时间段自行车的平均速度为13.45 km/h,电动自行车的平均速度为17.06 km/h。
3.2 重要参数测量
本节测量自行车的制动距离。实验选取5种不同的常见自行车,安装自行车码表(如图4)。本次实验在路况良好的条件下,分别在6个速度点连续测量5次,取对应的制动距离平均值,实验结果如表3所示,根据实验数据拟合得到的相关曲线如图5所示。由此得到自行车在平均速度下的制动距离为1.420 m。

表3 自行车在不同车速下的实际制动距离

车速/(km·h-1)71014182022制动距离均值/m1.081.241.461.822.062.35

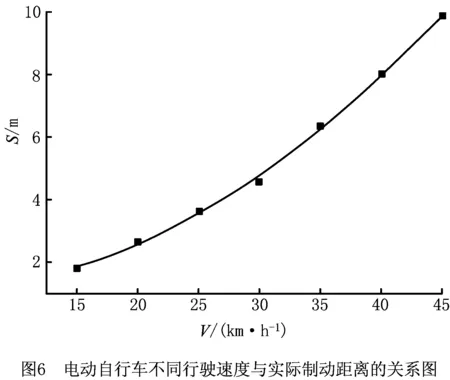
目前杭州电动自行车行驶中载人载物的比例在11%左右[6],因此本次实验选取4辆载重为75 kg的电动车。考虑到电动自行车的载荷和路面分布对车辆的影响,选择路面干燥、坡度稳定的路段为实验地点,在每个速度点连续测量5次取平均值,测量结果如表4所示,根据实验数据拟合得到相关制动曲线如图6所示。由此得到电动自行车在平均速度下的制动距离为2.028 m。

表4 电动自行车在不同速度下的实际制动距离和平均制动距离
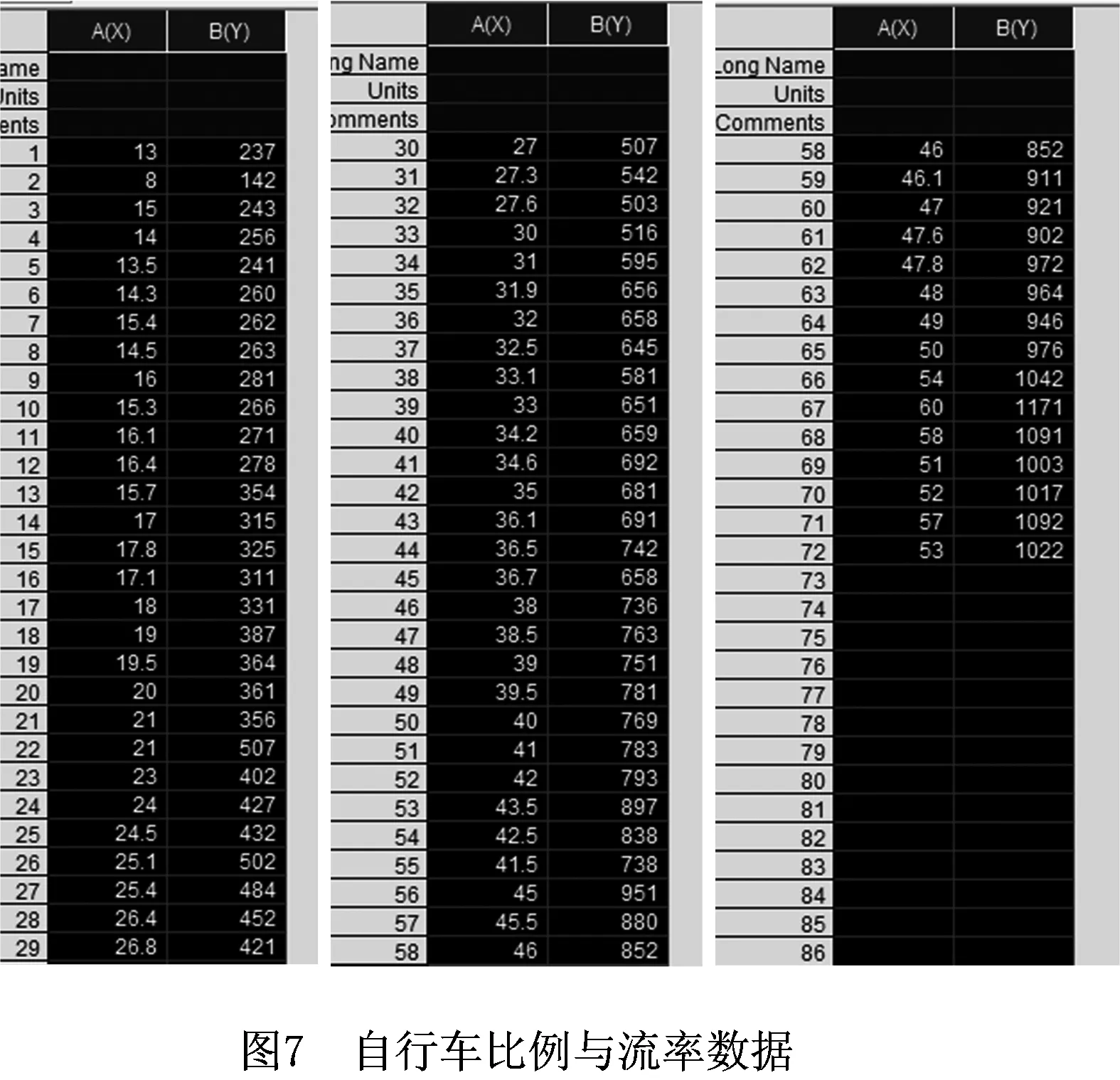
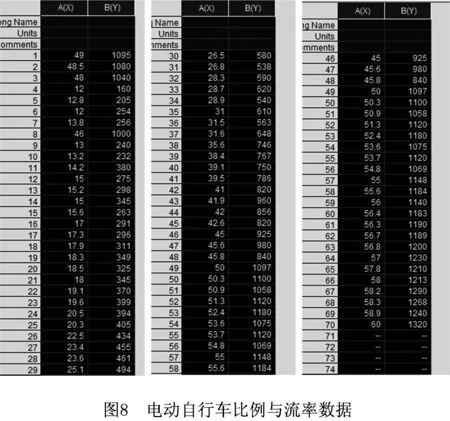
测量非机动车流率,实验选取晚高峰时间的天目山路、教工路、文三路、文一路、东新路为实验对象,录像记录交通流情况,分析不同混行比例下的饱和流率,天目山路调查点的情况如图7和图8所示,数据拟合结果如图9和图10示。


由拟合得到的曲线可见,当比例达到100%时,得到电动自行车高峰时期的饱和流率为2 146 辆/h,传统自行车高峰时期的饱和流率为1 894辆/h。
在非机动车道高峰时期,不同时间间隔下的超车事件统计如图11所示,取得的均值为0.362。

经计算得到的电动自行车对自行车的换算系数为1.359 7。表5所示为5个调查点的系数换算结果,对结果取均值,得到非机动车的换算系数为1.346 2。

表5 非机动车系数换算表
韩宝睿等[5]提出的传统计算方法、动态计算方法、静态计算方法,是基于对交通流特征参数或参数之间的关系进行分析来计算车辆换算系数,3种方法分别从速度、饱和流率、占有面积3个方面研究车辆换算系数。在此基础上,叶晓飞等[6]基于车辆行驶有效面积和冲突事件数模型提出两种计算方法,通过综合考虑非机动车的交通流特征提高了换算系数的准确度。
改进模型应用不同的蛇形摇摆宽度,基于冲突影响提出了电动自行车的有效行驶长度计算方法。计算有效行驶长度的关键在于确定制动距离,有别于已有计算模型中直接使用机动车制动距离,改进模型结合实验数据和纵向距离冲突影响系数得到电动自行车的制动距离计算方法。对比发现,机动车制动距离计算模型显然不符合非机动车模型,改进模型更符合实际情况,数据对比如表6所示。

表6 相同平均速度下的前纵向安全距离对比 m
改进的系数模型证明电动自行车具有更大的通行能力。换算系数反映了非机动车交通流的部分特征,它的确定有助于准确计算非机动车道的通行能力和合理设置路段车道的宽度。
通过实验研究发现,车辆尺寸和运动特性对非机动车各方面参数的计算影响明显。在实际行驶中,电动自行车与自行车的差异表现在制动距离、蛇形运动轨迹和非机动车道单位宽度的通过数量等方面。目前国内电动自行车市场的电动自行车种类繁多,本实验研究中就出现了各种类似电动摩托车的新潮车型,然而其中充斥着各种不合格车型,旧的电动自行车国家标准设定不能适应当下路况和出行者需求,企业在制造过程中存在参考标准不明确和不统一的问题。因此,新《电动自行车安全技术规范》在最高车速、整车重量、电机功率等方面以现行标准为基础进行了修改[15]。
4 结束语
本文提出电动自行车的动态车长计算方法,引入纵向距离冲突影响系数,具体阐述了自行车与电动自行车运动特性相关参数的确定方法,建立了基于将超车率法与有效面积法结合的非机动车换算系数改进模型,并利用杭州市实际数据标定出城市道路有机非隔离设施的非机动车换算系数为1.346 2。本文研究结果对精确计算非机动车道通行能力、合理设置交叉口红绿灯间隔、提高慢行交通设施服务水平,以及制定非机动车生产制造标准具有实践指导意义。
