基于非线性模型预测控制的车辆纵向队列协调控制*
2020-03-18杨秀建李金雨
杨秀建,李金雨
(昆明理工大学交通工程学院,昆明 650500)
前言
车辆队列(vehicular platooning)又称为车辆编队,是一列由若干辆汽车组成并按照指定跟驰控制策略安全稳定行驶的车队。作为智能汽车和智能交通系统实施的一种重要方式,车辆队列通过车载雷达、车 车(V2V)通信、车 基础设施(V2I)通信等方式获取车辆与道路环境信息,实现队列内车辆的协同运动控制,可以显著缩短跟驰间距,对缓解交通拥堵、改善交通安全性、降低交通能耗等方面都有积极作用[1-3]。
目前,车辆队列控制的实施方式正在由巡航控制(adaptive cruise control,ACC)向协同自适应巡航控制(cooperative adaptive cruise control,CACC)的方向发展,CACC是随着车联网通信技术的发展在ACC的基础上进一步结合V2V、V2I等通信方式而产生的一种热门的车辆队列实施思路[3-4]。作为车辆队列实施的关键技术,队列控制一直都是研究的热点,很多学者都从多智能体系统的角度对队列的稳定性及控制理论进行了广泛的研究[5-8]。实际的车辆队列控制涉及到队列的整体跟驰控制和队列中个体车辆的动力学控制两个方面,目前国内外针对ACC系统的研究多采用分层控制思想,即上层为车辆跟驰控制器,主要考虑车辆的跟驰性能、燃油经济性和舒适性等因素,通过车载雷达获取前方车辆的运动信息并决策输出安全跟驰行驶的期望加速度;下层为车辆动力学控制器,将上层的期望加速度转化为车辆油门开度或制动力矩,使车辆尽可能实现上层输出的期望加速度[9-13]。在这种两层控制结构中,上层的期望跟驰加速度最终都需要通过下层车辆动力学控制来实现,而车辆动力学控制又与车辆自身的动力学特性、载运工况、道路环境等因素有密切关系,车辆动力学的控制性能直接影响队列的跟驰控制性能,特别是随着队列中车辆数量的增加这个问题将更加突出,所以从本质上讲,队列跟驰控制和个体车辆动力学控制需要综合考虑并协调控制。目前车辆队列分层控制策略研究的重点还是上层队列跟驰控制算法,并且一般都是在良好路面条件下对算法进行评价分析。然而,由于这种分层控制结构的上下层控制器独立设计,上层跟驰控制器在控制决策时没有考虑个体车辆动力学的实际情况,因而在一些极端操纵工况下,例如在湿滑的低附着路面条件下,由于车辆动力学性能较差而控制困难,可能会出现个体车辆动力学稳定性和队列跟驰控制目标难以兼顾的情况。这时不但无法实现上层的跟驰控制目标,甚至还会导致追尾碰撞等事故。针对这个问题,一种理想的控制方案是采用集中式控制器对队列跟驰和车辆动力学稳定性实施一体化控制,但是问题比较复杂;而上下层协调控制的方案,虽然精度不如一体化方案,但是相对比较容易实现。
本文中基于协调控制的思路,提出了一种基于非线性模型预测控制(nonlinear model predictive control,NMPC)的车辆队列控制方案,在控制决策中综合考虑车辆跟驰和车辆动力学性能,将安全的跟车间距和各车轮的滑移率作为控制目标,确保车轮滑移率不发生突变且维持在稳定的范围内。对滑移率进行约束限制,基于序列二次规划算法(sequential quadratic programming,SQP)计算每一时刻前后轴的期望力矩,从而确保车辆在不同路面附着系数条件下都能安全稳定行驶。
1 非线性单轨车辆模型
为考察实际车辆动力学对队列跟驰控制的影响,仿真模型采用考虑非线性轮胎力特性的非线性车辆模型。由于仅考虑车辆的纵向运动,所以这里采用3自由度(3DOF)的非线性单轨车辆模型,图1给出了该模型的结构示意图。
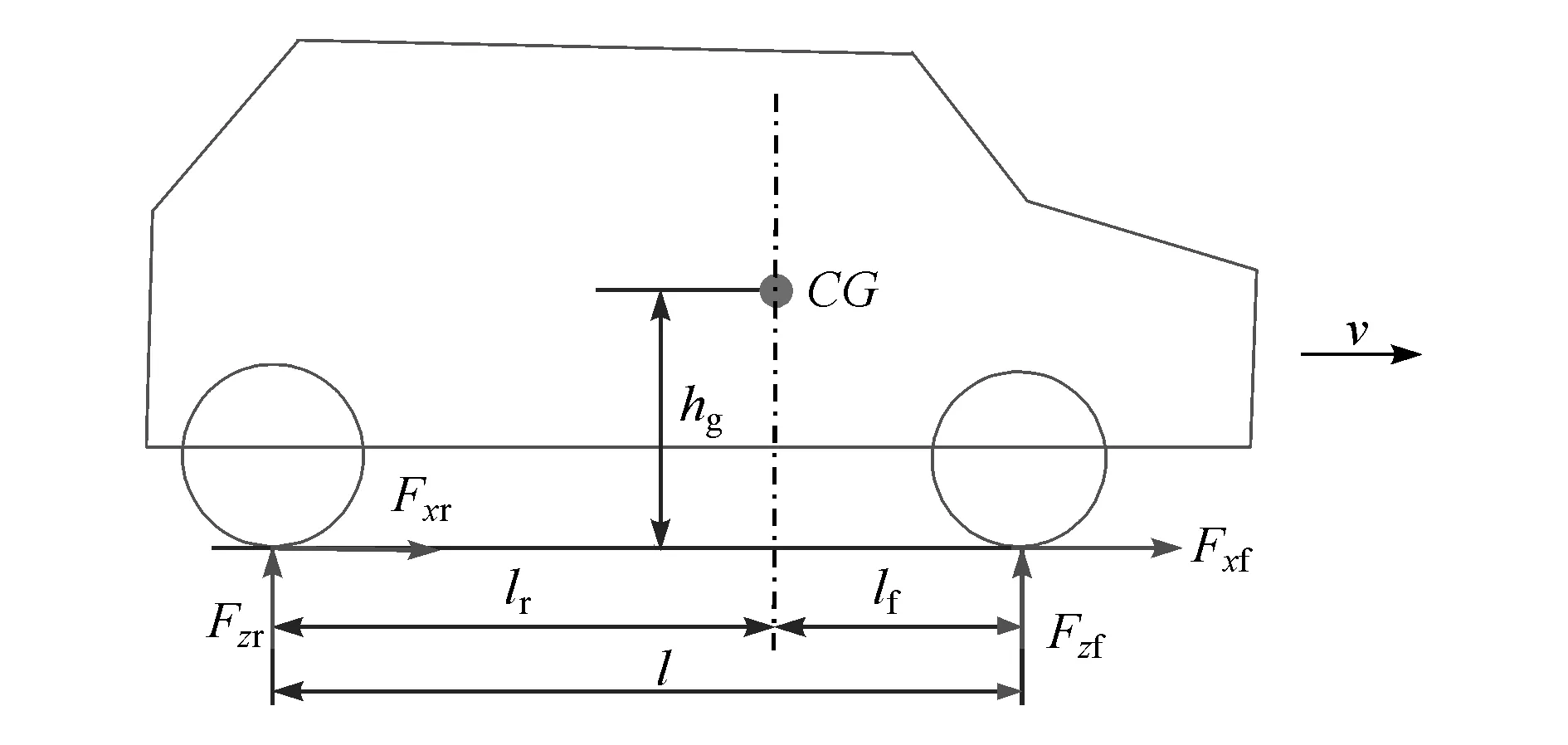
图1 3DOF非线性单轨车辆模型
3个运动自由度分别为整车的纵向运动、前车轮的旋转运动和后车轮的旋转运动,则整车的纵向运动方程可表达为

式中:m为车辆质量;v为车速;Fxf、Fxr分别为前、后轮纵向轮胎力;G为车辆重力;fr为车轮滚动阻力系数。
车辆的非线性动力学特性主要体现在前、后轮纵向轮胎力Fxf和Fxr的非线性特性,因此这里基于纯纵滑“魔术公式”非线性轮胎模型[14]来计算Fxf和Fxr,模型具体形式为
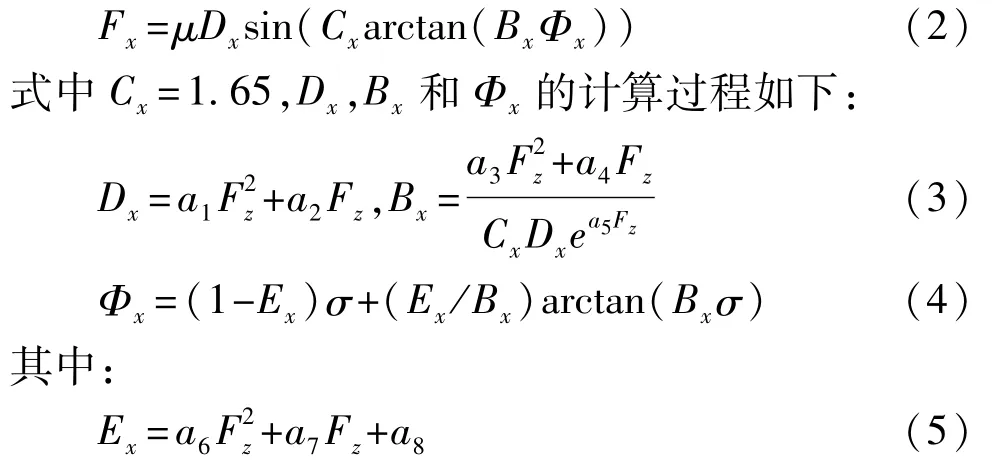
式中:μ为路面附着系数;a1~a8为常数;Fz为车轮的法向载荷,具体到前、后轮的法向载荷可分别表达为Fzf、Fzr,如图1所示;σ为车轮纵向滑移率。
前、后轮的法向载荷Fzf、Fzr可分别计算为

式中:hg为车辆质心高度;ax为车辆纵向加速度。
车辆加速(ax>0)和制动(ax<0)时的车轮滑移率可表达为
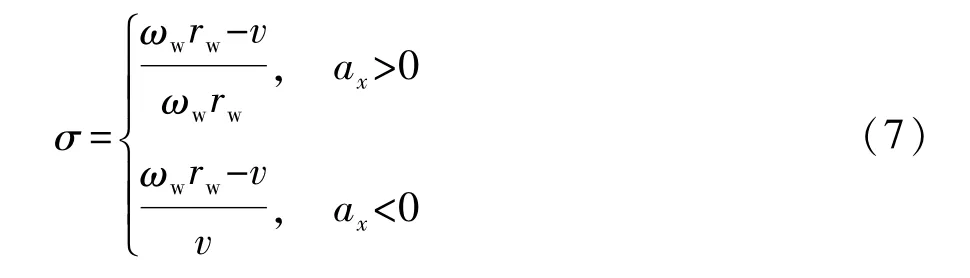
式中:ωw为车轮旋转角速度;rw为车轮滚动半径。车轮旋转角速度ωw通过下面的车轮旋转动力学方程来计算,即

式中:Iw为车轮转动惯量;Tw为车轮制动力矩或驱动力矩。
2 基于NMPC的车辆队列协调控制
2.1 控制方案
典型的车辆队列如图2所示,这里不考虑V2V或V2I等通信方式,队列中的车辆仅通过车载雷达探测与其前方车辆的相对速度、车间距等信息进行跟驰控制,在保持其自身动力学稳定性的基础上尽可能实现期望的跟驰控制目标。
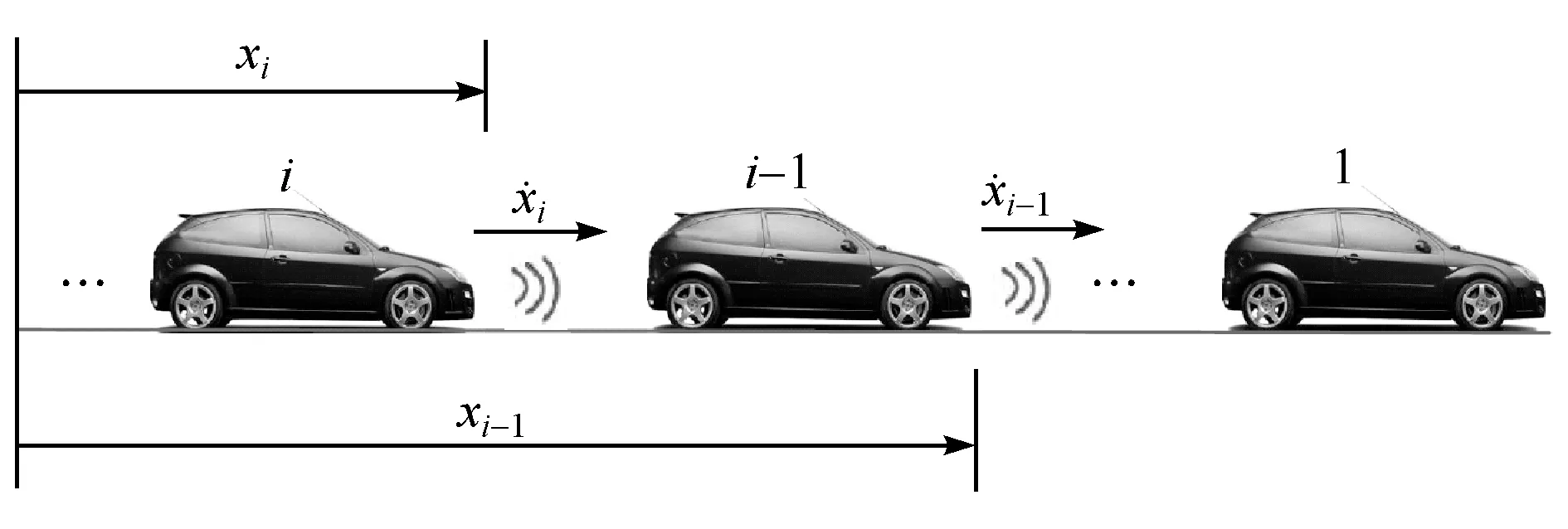
图2 车辆队列示意图
本文中提出的基于NMPC的车辆协调控制整体方案如图3所示,协调控制主要是综合权衡队列的跟驰控制目标与个体车辆的动力学稳定性,基本原则是在保证车辆稳定行驶的基础上尽可能实现期望的跟驰运动。车辆在低附着路面条件下加速/制动时容易出现由于车轮滑移率突变而失稳的现象,在这种情况下对整个车辆队列来说将更加难以控制。因此,本方案将反映车辆动力学稳定性的车轮滑移率作为上层队列控制器控制决策的重要参考。从图中可以看出,车辆i的NMPC队列控制器的输入信息除车速vi、加速度axi以及与前车的车间距Δxi和相对速度Δ·xi外,还有车辆i的前、后车轮的旋转角速度
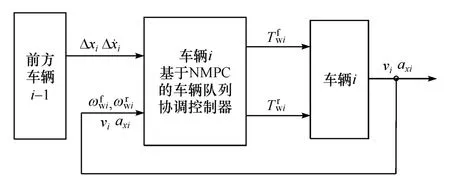
图3 车辆队列协调控制方案
车辆队列控制本质上是非线性车辆动力学与队列跟驰的协调控制,是一个强非线性、多目标约束优化控制问题。这里采用NMPC控制方法,在满足滑移率约束使车辆安全稳定行驶的情况下优化求解控制序列,得到车辆i的前、后轴驱动/制动力矩NMPC的预测模型和目标函数中含有非线性动态,与一般的MPC方法类似,也是一个序列有限时域的最优控制问题,大致也分为模型预测、滚动优化和反馈校正3步。首先根据系统状态空间方程预测系统未来动态,然后在线滚动求解优化问题,最后将解序列的第一个元素施加于系统,通过系统的输出值修正当前时刻的系统状态,并结合测得信息进行下一次循环控制[15-16]。
2.2 控制模型
采用车头时距跟驰策略,车辆i与其前方车辆i-1的期望车间距即安全距离定义为

式中hwi为车头时距。相应地,车辆i的跟驰误差为

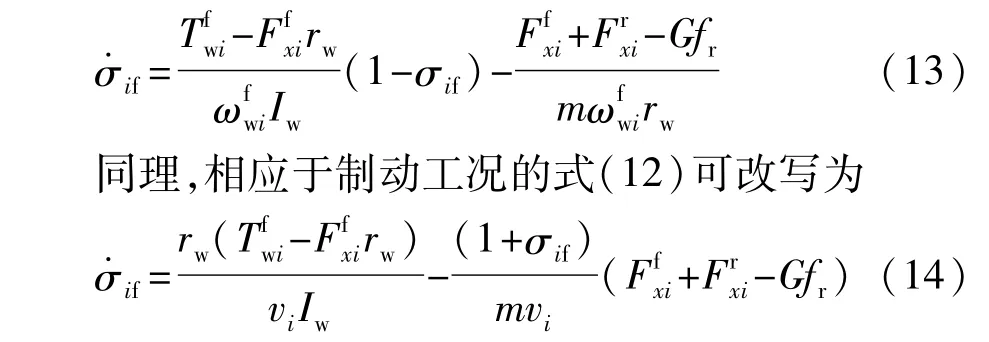
以车辆前轴为例,由式(7)滑移率表达式可得车辆在加速工况下滑移率对时间的导数:

同理,在制动工况下有

式中:σif为车辆i前轴车轮的滑移率为轮速。结合式(1)和式(8),式(11)加速工况下滑移率的导数公式可改写为
为方便控制器设计,对非线性纵向轮胎力进行线性化处理,车辆i前轴的纵向轮胎力可表达为

式中Kif为车辆i前轴车轮的纵滑刚度,可通过式(16)的拟合表达式计算[17]。

式中:p1、p2、p3为拟合系数;Fz0为常数。
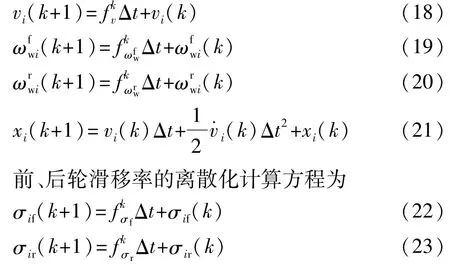
同理,也可以得到车辆后轴车轮的关于滑移率、纵向轮胎力的上述方程。结合式(1)、式(8)、式(13)~式(16)和后轴车轮的相关方程,可得车辆i的控制模型方程,考虑到NMPC控制的需要,这里直接给出其离散形式,即

式中:zi=[vixi]T为系统状态变量;ui=[]T为系统输入;yi=zi为系统输出变量;输出矩阵Ci=diag(1,1,1,1)为系统状态量在k时刻的变化梯度;Δt为采样时间。具体地,各状态的离散化计算模型分别为
2.3 控制算法设计
以队列中车辆i为例,基于NMPC车辆队列协调控制的基本流程思路如图4所示。在本问题中,目标函数考虑了车辆跟驰控制和车轮滑移率控制两个方面,约束条件主要是车轮滑移率约束,控制输入为前、后轴的驱动/制动力矩。
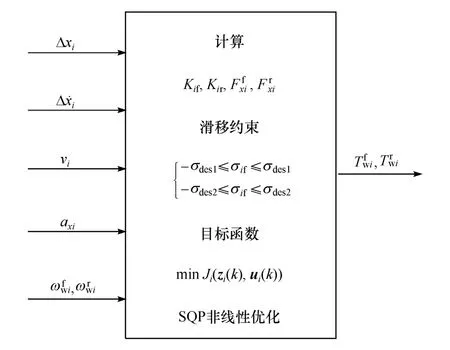
图4 基于NMPC的车辆队列协调控制流程
设控制时域和预测时域分别为Nc和Np,在采样时刻k控制变量序列Ui(k)和系统输出变量序列Yi(k)分别为
在采样时刻k,预测控制起始点zi(k)等于zi(k|k),以此作为系统状态的初始值来预测系统未来的动态变化。系统状态和输出预测分别由式(26)和式(27)给出:
在每一个采样时刻,利用新测量的车辆状态信息实时更新系统的状态预测变量和输出预测变量,然后进行一次优化求解,将得到最优的驱动/制动力矩作用于队列中的车辆,在每一个采样时刻都会进行一次优化求解,直至任务结束。
根据上述对控制系统的描述,为实现队列中车辆的跟驰控制目标,保证在极限操纵工况下车轮不会发生滑移突变且滑移率保持在稳定的范围内,建立带约束的多目标函数,目标函数由3个指标函数Ji1~Ji3组成,具体情况如下。
(1)实现期望的车间距是车辆队列跟驰控制的主要目标之一,即通过控制使跟驰误差尽可能小,该控制目标通过指标函数Ji1来实现,即
(2)为实现良好的跟驰运动,除了车间距通常还需要将跟驰车速作为一个控制目标,即尽可能与前方车辆速度保持一致,因此定义下述指标函数:

(3)从队列中个体车辆的动力学稳定性考虑,为防止在极限操纵工况下车轮滑移率出现急剧增加而导致车辆加速/制动失控,期望车轮的圆周速度与车速相差尽可能小,目的是使车轮滑移率保持在较低的水平,这一目标通过指标函数Ji3来体现,即
由上述3个指标函数Ji1~Ji3可得NMPC的目标函数为

对各性能指标都设置相应的权重,通过调整权重来调整各性能的控制要求,从而可以综合提高车辆队列的跟驰性能和个体车辆的动力学稳定性。
为防止车轮滑移率突变,NMPC需在限定的车轮滑移率范围内进行每一次优化求解,因此定义前、后轴车轮滑移率约束:

2.4 NMPC优化求解
根据非线性控制模型方程和上述各目标函数方程的定义,优化问题可表示为
式中:hm(u)为线性不等式约束;gn(u)为非线性不等式约束。
序列二次规划(SQP)是求解一般非线性约束规划问题的一种非常有效的方法,它在每个迭代点处求解构造的一个二次规划子问题作为迭代的搜索方向,然后进行一维搜索得到新的迭代点,直到迭代点列靠近非线性规划问题的最优解[18]。SQP算法流程如下:
(1)取合理的初始解u0;
(2)求解二次规划子问题
得到搜索方向dk;
(3)如果|dk|<ε或者k>Nc,则停止,反之继续进行下一步;
(4)找到步长αk,满足0≤αk≤1且
f(uk+αkdk)<f(uk)
(5)令uk+1=uk+αkdk,k=k+1,转到步骤(2)。
3 仿真分析
通过模型仿真对所提出的协调控制方案进行评价分析,以图2所示的同质车辆队列为对象,这里仅考虑3辆车的情况,领头车辆序号为1,后面的跟驰车辆序号依次为2和3。队列中各车辆均采用前文所建立的非线性单轨车辆模型,所以该车辆队列模型能够反映在低附着等极限操纵工况下的队列跟驰控制性能。
所采用的车辆模型参数为:m=1700 kg,lf=1.1 m,lr=1.6 m,hg=0.65 m,rw=0.25 m,fr=0.01,Iw=1 kg·m2,g=9.81 m/s2。考虑队列制动与队列加速两种操纵工况,分别考察在μ=0.8和μ=0.3高、低路面附着条件下的队列跟驰控制响应。首先考察队列制动控制,初始时队列以24 m/s的速度匀速行驶,某时刻领头车辆从24的速度匀减速到18 m/s,然后匀速行驶,后面的跟驰车辆采用定时距跟驰策略,则在高、低路面附着条件下基于NMPC的队列跟驰控制响应分别如图5和图6所示。图中给出了车速、跟驰误差和车轮的滑移率响应,其中车速和跟驰误差反映的是队列的跟驰性能,而车轮滑移率反映的是个体车辆动力学性能。图中:e2,1为车辆2跟驰车辆1(领头车)的误差;e3,2为车辆3跟驰车辆2的误差;σ2f、σ2r分别为车辆2前、后轴车轮的滑移率,σ3f、σ3r分别为车辆3前、后轴车轮的滑移率。可以看出,所提出的基于NMPC的控制方案可以实现队列的跟驰控制,即使是在μ=0.3的低附着路面条件下,也可以实现良好的跟驰控制效果,并且车辆动力学性能稳定。
在加速工况下,初始时队列以15 m/s的速度匀速行驶,某时刻领头车辆匀加速到24 m/s,然后匀速行驶,图7和图8分别给出了高、低两种路面附着条件下队列加速跟驰控制的响应。可以看出,与高附着路面情况相比,在低附着条件下车速、跟驰误差等跟驰状态波动较大,调整时间较长,尽管如此,仍可实现队列的跟驰控制,各车轮滑移率也都控制在较小的范围内,能够保证车辆安全稳定行驶。低附着路面条件下跟驰状态波动较大主要是由于NMPC控制器在控制决策中考虑了个体车辆动力学(车轮滑移率),在队列跟驰和保持个体车辆动力学稳定性两者间进行了折中处理,决策输出的期望跟驰加速度从车辆跟驰控制的角度来看并不是最优的,但是对保持个体车辆的动力学稳定性是有利的,即通过损失部分跟驰性能来提高车辆的行驶稳定性。
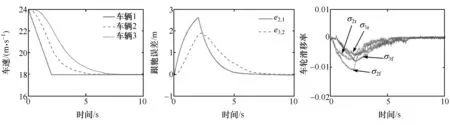
图5 高附着路面条件下车辆队列制动跟驰响应(μ=0.8)
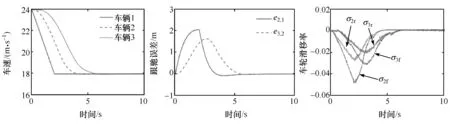
图6 低附着路面条件下车辆队列制动跟驰响应(μ=0.3)
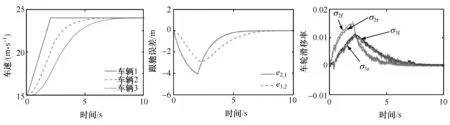
图7 路面附着系数为0.8时车辆队列加速响应情况
图8 路面附着系数为0.3时车辆队列加速响应情况
4 结论
车辆队列采用上、下两层的分层控制结构时,结构清晰易于实现,但是这种方案也存在上下层控制器间联系不够密切的问题,即在低附着系数等极限行驶工况下,下层控制器可能无法实现上层的期望跟驰要求,甚至导致队列车辆追尾碰撞事故的发生。
针对这一问题,本文中提出了队列跟驰和车辆动力学协调控制的思路,基本思想是在保证队列中个体车辆安全稳定行驶的基础上,尽可能实现队列跟驰控制的目标。基于NMPC方法设计了车辆队列协调控制策略,设计了包括跟驰间距误差、跟驰速度误差以及车速与轮速差3个子目标的优化目标函数,将队列跟驰与车辆动力学稳定性的协调控制转化为约束优化控制问题。基于非线性车辆模型的3车辆同质队列对所提出的控制方案进行了仿真分析,考察了高、低两种路面附着条件下的加速和制动跟驰工况。结果表明,所提出的基于NMPC的队列跟驰协调控制策略可在大范围操纵工况下实现队列的跟驰控制,并且都可以保证车辆安全稳定行驶,这是由于所提出的协调控制方案,可在队列跟驰和保持个体车辆动力学稳定性两者间合理进行折中处理,决策输出合理的跟驰期望加速度。