TRIZ 发明原理在机械振动理论中的解析
2020-03-15
(齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006)
1 TRIZ 理论的发明原理
TRIZ 是“发明问题解决理论”的俄文缩略词的英译,由前苏联G.S.Altshuller 博士于1946 年创立.他从1946 年开始,领导一批研究人员和学生,在分析研究世界各国250 万件专利的基础上,从抽样的20 万件专利中选出4 万件作为解决发明问题的代表,提出一套进行发明即产品创新的方法理论TRIZ.20 世纪80 年代前,它对别国严格保密.1992 年随着苏联解体,一批TRIZ 专家移居美国等西方国家,才逐渐流传到世界各国.
TRIZ 的出现,给创新这一现代社会中最活跃的元素带来了革命.TRIZ 提供的不仅是一种纯粹的创新理论,它还是一种思维模式,能够帮助我们形成一种系统的、流程化的创新设计思考模式,有助于人们在几乎所有事情中找到创新的方法[1].
TRIZ 理论40 个发明原理见表1.
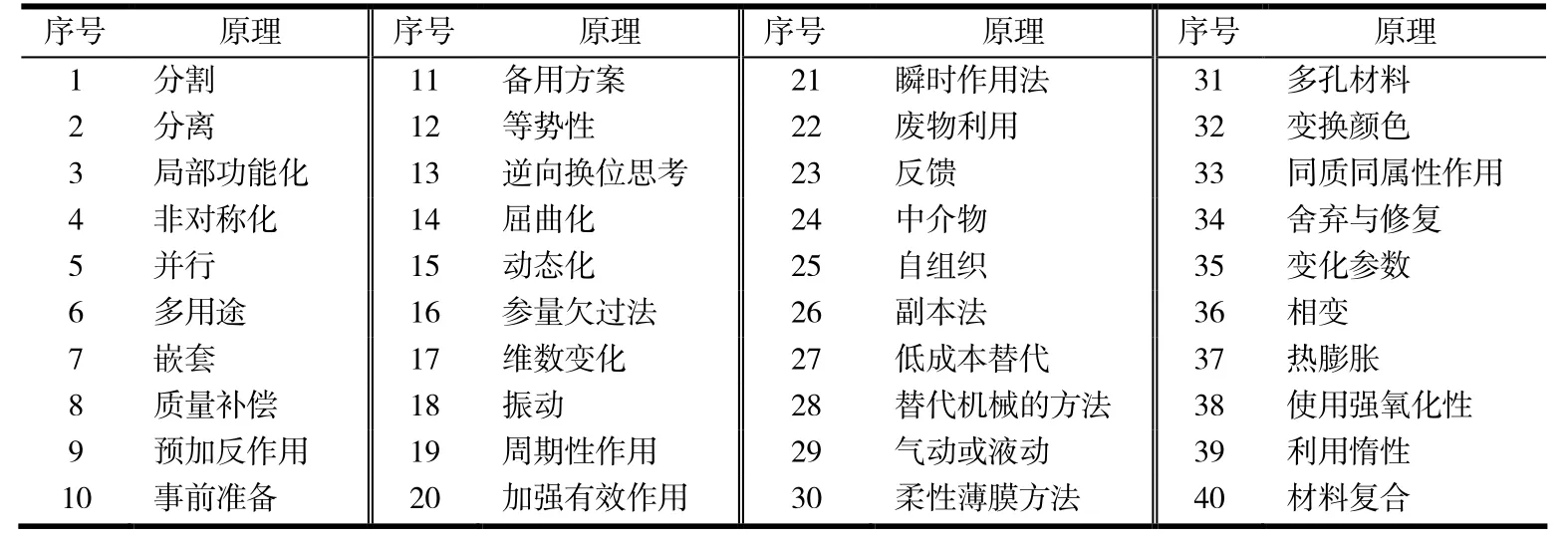
表1 TRIZ 理论的40 个发明原理
2 振动系统基本模型中的发明原理
实际振动系统是复杂的,系统分析需要简化.系统的简化取决于问题的复杂程度和所要求的计算精度.一般情况下,考虑的问题越复杂,要求计算精度越高,模型的复杂程度也越高.系统需要离散化分割,变成“质量-阻尼-弹簧”模型单元的集合体.振动系统的极简模型见图1.复杂系统分解为基本模型单元是发明原理1 分割原理的运用.而每个单元中的分化、惯量属性、弹性属性、阻尼属性,又是运用发明原理3 局部功能化的结果.

图1 振动系统的极简模型
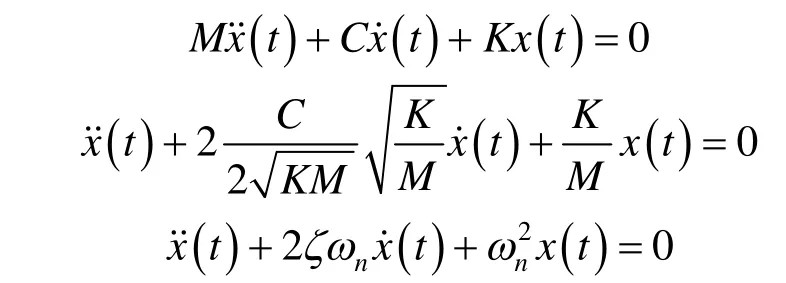
研究振动基本模型的微分方程:对于一个物理的振动系统,其组成元素包括质量、阻尼、刚度.振动系统极简模型的动力学微分方程

这样,得到了振动模型的一个副本.研究模型副本,为理解模型提供了一条有利的途径.这是发明原理26副本法.
研究自由振动问题,探讨齐次微分方程解,令x(t)=ezt,代入振动微分方程,这是发明原理7 嵌套法.
机械振动理论,谋篇布局,从单自由度系统到多自由度系统,由有限自由度系统到无限自由度系统,维度不断增加.符合发明原理17 维数变化法[2-3].
3 多自由度振动系统数学建模中的发明原理
建立多自由度系统的微分方程(见图2),以一个无阻尼3 自由度系统为例.其微分方程


图2 一个多自由度振动系统的模型
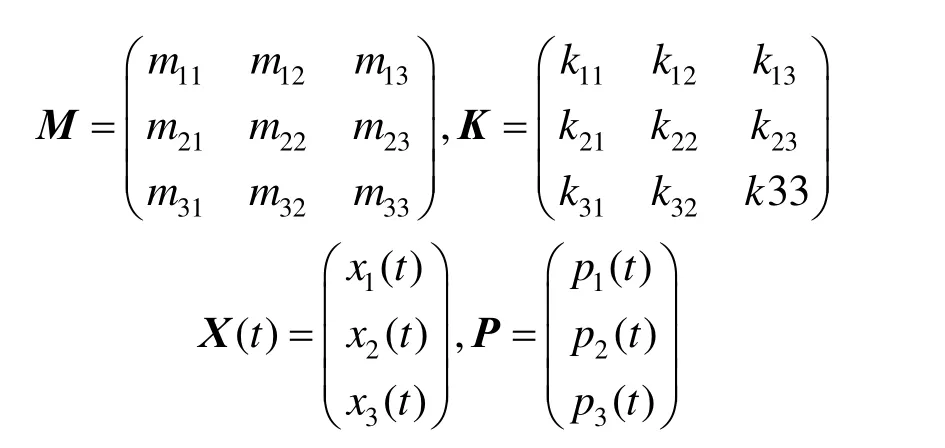
方程左侧、右侧均为力的量纲,所以此方程称作用力方程.方程左右两侧量纲等同,符合发明原理33同质同属性作用.
(1)假设外力以准静态方式施加于系统,系统中惯性力为“0”,其中,刚度矩阵K中的kij元素称为刚度影响系数,它表示准静态系统单位变形所需要的作用力.

如x1发生单位位移,x2和x3保持不动,令x1=1,x2=0,x3=0,由此条件能够解算出m1,m2,m3的受力,即k11,k21,k31的数值.同理,可解出其它刚度影响系数.
这里采用了准静态分析法,是发明原理21 瞬时作用原理的逆向思维.发明原理13 是逆向思维.
(2)假设系统受到外力的瞬时作用,只产生加速度不产生位移,x(0)=0.其中,质量矩阵M中的元素mij称为质量影响系数.它表示瞬态仅在第j个坐标上产生单位加速度“1”,其它坐标上加速度为“0”,而相应在第i个坐标上需要施加的作用力,例如:m1的坐标x1产生1 个单位的加速度,x2,x3加速度保持为“0”,则
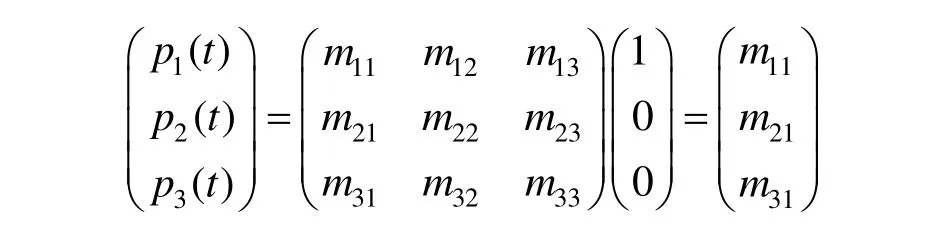
从而解算出质量影响系数m11,m21,m31.
同理,可解算出其它质量影响系数.此处分析采用了发明原理21 瞬时作用法[4-5].
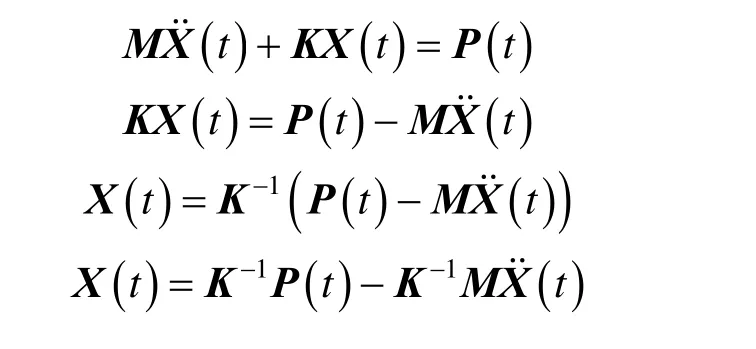
最后,得到此3 自由度振动系统的数学模型

(3)位移方程与柔度矩阵
令F=K-1

通过矩阵变换,将作用力方程转化为位移方程.刚度矩阵的逆,即为柔度矩阵.相应的动力学微分方程具有位移的量纲,因此,方程也称为位移方程.对系统准静态施加作用力,方程中的加速度项为“0”,因此,方程转化为

令P(t)=(1,0,0)T,即对质量m1作用单位1,则

第1 个坐标上m1施加单位力,第1 个坐标上产生的位移f11,第2 个坐标上产生的位移f12,第3 个坐标上产生的位移f13.同理,分别对质量m2,m3施加单位力,计算相应的柔度系数.最后得到图2 模型的柔度矩阵

振动方程刚度矩阵,向柔度矩阵的转换,符合发明原理13 逆向换位思考[4-6].
4 振动微分方程求解中的发明原理
单自由度振动系统微分方程引入阻尼比、固有频率和阻尼固有频率的数学分析,是发明原理35 变化参数法,重新定义振动系统的微分方程
特征方程为

其解为

其中:ξ>1,微分方程解不含谐振量,系统不振动;ξ=1,系统振动临界,为系统是否振动的分界点;ξ<1,微分方程解含有谐振量,系统振动.
n维自由度振动系统的求解,通过广义坐标和正则坐标的变换,把n维自由度振动的问题转化为n个单自由度系统的问题.然后把正则坐标系中的解再转换为时变坐标系中的解.求解过程中,采用了发明原理1 分割法、发明原理35 变化参数法[1,6-7].
5 振动控制中的发明原理
机械振动三要素为振源、传递路径和受控对象,对三要素采取相应的措施都可以对振动进行控制.
5.1 振源控制
冲击机械,改进生产工艺,焊接取代铆接,压延取代冲压;旋转机械,尽量调整好静平衡和动平衡,减小离心力和偏心惯性力;往复式机械,设计平衡机构改善平衡性能.采用了发明原理9 预加反作用、发明原理10 事前准备和发明原理8 质量补偿.
5.2 传递路径控制
隔振,就是在振源与地基、地基与设备之间,设置一定的弹性装置,以隔离或减小振动能量的传递.这符合发明原理2 隔离、发明原理24 采用中介物.设计附加阻尼结构、设置阻尼装置减振,消耗振动动能,是设计方案增加了振动系统的惰性,符合发明原理39 利用惰性.
5.3 受控对象控制
受控对象不宜采用隔振器时,受控对象上附加子系统,吸收受控对象的振动能量,减小受控对象的振动.这符合发明原理15 动态化,将受控对象的振动转化为子系统的振动.对于多频激励,可附加一系列的分布式动力吸振器,抵消不同频率的振动,符合发明原理5 并行化.采用反馈控制技术,控制机械系统振动,符合发明原理23 反馈[8-10].
6 结语
TRIZ 理论的发明原理在不同领域的应用与解析,将极大提升学生的创新思维能力,使创新能力的训练在学习过程中落到实处.在学习科学理论的过程中,分析“字里行间”的发明原理,也是透彻理解科学理论的好方法.
TRIZ 理论的发明原理在不同领域的应用与解析,能够高效获得产品开发创新方案,提供新的思路,也是完善发明方法的必要途径.
