重力滚道下柱体缺陷检测系统的PLC 控制设计
2020-03-08刘新波雷恺鸽
刘新波, 雷恺鸽, 李 冬
(1.邵阳学院多电源地区电网运行与控制湖南省重点实验室, 湖南 邵阳 422000;2.邵阳学院高效动力系统智能制造湖南省重点实验室, 湖南 邵阳 422000)
0 引言
柱形滚子广泛应用在精密机械运动部件中, 其表面质量直接影响部件的运动精度、动态性能和寿命[1],因而要求表面精度极高; 此类零件作为基础件, 生产数量巨大,因而要求检测效率极高[2]。由于加工工艺的不同,在柱形滚子加工的过程中,表面可能出现杂质、小点、划伤等微小的表面缺陷[3],这些缺陷会影响整个机械部件的运动性能。 因此,深入研究柱形滚子的缺陷检测方法,提高检测精度和检测效率,具有重要意义。
有学者采用单相机对柱体侧面进行局部成像和测量[4],这种成像方式要求圆柱体自旋转、多区域成像,结构复杂,检测效率难以满足柱形滚子的检测要求。 也有学者采用线阵CCD 的方式对圆柱体表面检测系统进行周向扫描测量[5], 这种检测方式并没有解决光泽表面图像采集难题,同时无法兼顾柱体两底面,且结构复杂,检测节拍慢。
1 双相机柱形滚子输送原理与系统结构
1.1 重力滚道设计
(1)分析最下方滚动体在纯滚动状态下的受力情况。
该对象共受五个力的作用,分别是:
重力:G=mg;
第N-1 个滚子对第N 个滚子的压力:F1=(N-1)mg[sin(θ)-f1cos(θ)];

图1 最下方滚动体自输送模型Fig.1 The self-conveying model of the bottom rolling element
第N-1 个滚子对第N 个滚子的滑动摩擦力:F2=(N-1)mgf2[sin(θ)-f1cos(θ)]
滑道对第N 个滚子的支持力:F3=mgcos (θ)+(N-1)mgf2[sin(θ)-f1cos(θ)]
滑道对第N 个滚子的最大滚摩擦力:F4={mgcos(θ)+(N-1)mgf2[sin(θ)-f1cos(θ)]}f1
其中,f1—滑道材料与钢柱的静摩擦系数;f2—钢柱之间的动摩擦系数;m—单个钢柱的重量;θ—滑道与水平线的夹角。
不滑动条件:

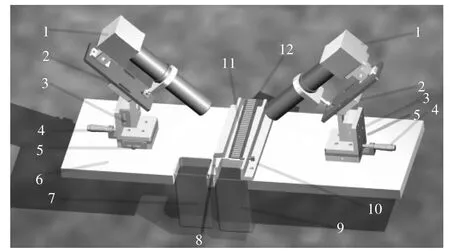
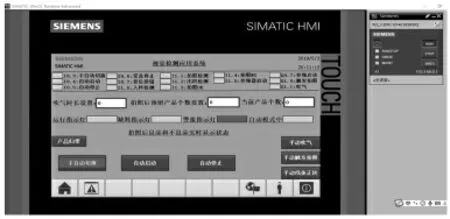
假设单个滚子在滑道上不滑动,即mgsin(θ) 通常情况下,f1,f2均小于1,可见,当单个滚子在滑道上不产生滑动时,理论上,当若干个滚子在其上运动时,最下方的滚子仍然不会有滑动。 反之, 假设单个滚子在滑道上滑动, 即mgsin (θ)>f1mgcos(θ) 则不等式(1)的解为: 可见,当单个滚子在滑道上产生滑动,理论上,当若干个滚子在其上运动时,最下方的滚子必然会滑动。 在满足不滑动的条件,即mgsin(θ) 滚动条件: 其解为: 通常情况下,f1,f2均小于1,且由于sin(θ) 综合不滑动条件和滚动条件, 得出最下方滚动体的纯滚动条件为:sin(θ) (2)分析最中间滚动体在纯滚动状态下的受力情况。 图2 中间滚动体自输送受力模型Fig.2 The self-conveying force model of the middle rolling element 该对象共受七个力的作用,分别是: 重力:G=mg; 第K-1 个滚子对第K 个滚子的压力:F1=(K-1)mg[f1cos(θ)-sin(θ)]; 第K-1 个滚子对第K 个滚子的滑动摩擦力:F2=(K-1)mgf2[f1cos(θ)-sin(θ)] 第K+1 个滚子对第K 个滚子的支持力:F5=Kmg[sin(θ)-f1cos(θ)] 第K+1 个滚子对第K 个滚子的滑动摩擦力:F6=Kmgf2[sin(θ)-f1cos(θ)] 滑道对第K 个滚子的支持力:F3=mgcos (θ)-mgf2[sin(θ)-f1cos(θ)] 滑道对第N 个滚子的最大滚动摩擦力: 不滑动条件: 假设单个滚子在滑道上不滑动,即mgsin(θ) 通常情况下,f1,f2均小于1,且大于0,可见,当mgsin(θ) 上述情况发生在假设摩擦系数f1和f2恒定下的的理论推导, 事实上, 在单个滚动体满足纯滚动条件的情况下,并行排列的滚动体由于下方滚速大于上方滚速,所有滚子在自由状态下并不会接触, 呈现出单滚动体的滚动特征。 只有滚动条件收到外部干扰,如滚动体的缺陷,滚道内部多余物、 或边界阻碍等将影响滚动体的受力,因此,在利用斜滚道实现滚动体的输送时,需要确保滚道清洁并具确保滚动体在滚动时没有边界阻碍,同时,采用满足tg(θ) 柱形滚子经重力轨道传输到拍照检测位, 相机拍摄柱形滚子采集图像[6],传输到计算机,分析柱形滚子的表面信息。 根据分析结果通过PLC 控制系统[7]控制气嘴将柱形滚子分类到不同区域。 机械结构如图3 所示。 图3 重力滚道下柱体缺陷检测系统机械结构Fig.3 The mechanical structure of cylinder defect detection system under gravity raceway 其中1 为CCD 相机,2、3、4、5 为调节螺钉,3 为高度调节螺钉,4、5 为水平调节螺钉,2 为倾斜调节螺钉。 滚子到达拍照检测位10 时,相机拍摄其照片,通过计算机处理传输出OK 或NG 信号,若为OK 信号,不触发任何动作,柱形滚子进入9 合格品收纳箱;若为NG 信号,当柱形滚子到达10 气嘴位,PLC 控制气嘴吹起使柱形滚子经过位置8 路径进入7 不合格收纳箱。 实现柱形滚子的合格不合格分级。 重力滚道下柱体缺陷检测系统的系统框图如图4 所示, 主要包含双相机视觉处理系统、 控制系统和机械系统。 入料、到位和出料是自动控制模式下的主要工位。 图4 重力滚道下柱体缺陷检测系统结构框图Fig.4 The mechanical structure block diagram of cylinder defect detection system under gravity raceway 连接外界电网并检测无误后下载程序, 开始进行对气调试,程序流程如图5 所示。 启动设备,入料感应到柱形滚子,通过拍照感应后,触发相机拍照,将拍照结果传送给CPU。 CPU收到拍照结果,进入移位程序块;程序块中移位个数在10~20 个,根据滚动条可载滚子个数设置,拍照位得到的拍照信号一直移位到最后移位,最后一位若为OK 则顺利进入合格区; 若最后一位为NG 信号, 后将控制气嘴,将不合格品吹送至不合格收纳箱。 通过设定拍照柱形滚子位数,如果柱形滚子位数到达设置个数,且储存结果为不合格时开启吹气功能,待吹气延时到达后关闭吹气,并循环该程序。 图5 主程序流程图Fig.5 The main program flow chart 图6 顺序功能图Fig.6 The sequential function chart 图7 HMI 初始界面图Fig.7 The HMI initial interface diagram 对图7 中的吹气时长、拍照后预留滚子个数进行设置。 吹气时长最小单位采用ms,一般设置值为2000。拍照后预留滚子个数最低为10 个, 最高为20个。 在图8 中可以看到系统的I/O 运行状态,相机拍照处理后的信号为拍照OK 显示为绿色,信号为NG 显示为红色。若各感应器功能正常,整体控制功能启动,则进行现场调试、联机调试、脱机调试,确认无误后即可投入使用。 图8 运行界面图Fig.8 The running interface diagram 本文将重力轨道与PLC 自动控制引入到柱形滚子的外观缺陷检测中,降低了检测成本,提高了柱形滚子的检测效率。经过实验发现,该系统能够实现重力滚道下柱形滚子的上下料和缺陷分类控制,具有良好的稳定性,满足了柱形滚子的检测要求。







1.2 系统结构

2 控制系统软件设计

3 控制系统测试


4 结论
