对中杆微型惯性测量单元的高精度方位初始对准方法
2020-03-06严恭敏柯欢欢高小鹏
严恭敏,柯欢欢,高小鹏
0 引言
实时动态差(real time kinematic,RTK)测量是1种常用的全球卫星导航系统(global navigation satellite system,GNSS)测量方法,采用了载波相位动态实时差分方法,可实时得到厘米级的定位精度,它在施工放样、地形图测绘及摄影测量布设像控点等工程测量技术领域获得了广泛的应用,极大地提高了测量作业效率[1-3]。GNSS接收机测量的是放置在对中杆顶端的天线相位中心的位置,而实际测绘需要的一般是对中杆下尖的位置,传统作业方式需要调整对中杆上的水准气泡居中[4],作业效率低,在墙角、管线等环境下难以实现对中杆的倾斜测量。
利用先进的倾斜测量技术无需保持对中杆垂直,实现“停下即采,采好即走”,提高作业速度,同时解决了对中杆不能到墙角、崖边等特殊点的测量。倾斜测量技术主要有2类:①借助于微惯性测 量 单 元 ( miniature inertial measurement unit,MIMU)或磁罗盘建立对中杆本体坐标系与地理坐标系之间的转换关系,自动补偿倾斜误差[5];②“摇一摇”倾斜测量方法,通过晃动对中杆测量空间中多个点,以对中杆长度作为约束条件进行空间交汇计算出测量点的位置[6]。上述2类方法都存在一定的缺陷。利用 MIMU进行倾斜补偿,当对中杆倾斜角较大时,位置补偿精度主要受限于 MIMU惯导的方位对准精度。本文主要讨论 MIMU惯导的高精度方位初始对准方法,该方法只需保持对中杆下尖不动,将GNSS天线依次倾斜3个或2个角位置,即可实现对准,与文献[7]的方法“手持GNSS接收机步行一段10 m左右的距离”相比,空间依赖性小。
1 高精度方位初始对准算法
如图1所示,MIMU与GNSS接收机一起固连安装在对中杆的顶端。MIMU本体坐标系简记为b系。对中杆下尖点记为P0,GNSS天线相位中心记为 在b 系上的投影是常值,记为杆臂矢量。GNSS输出的一般是经纬高地理坐标,不难将其转换为当地站心直角坐标,比如以 P1点为原点的“东(E)-北(N)-天(U)”直角坐标(单位为m),后面简记该坐标系为导航参考坐标系(n系)。
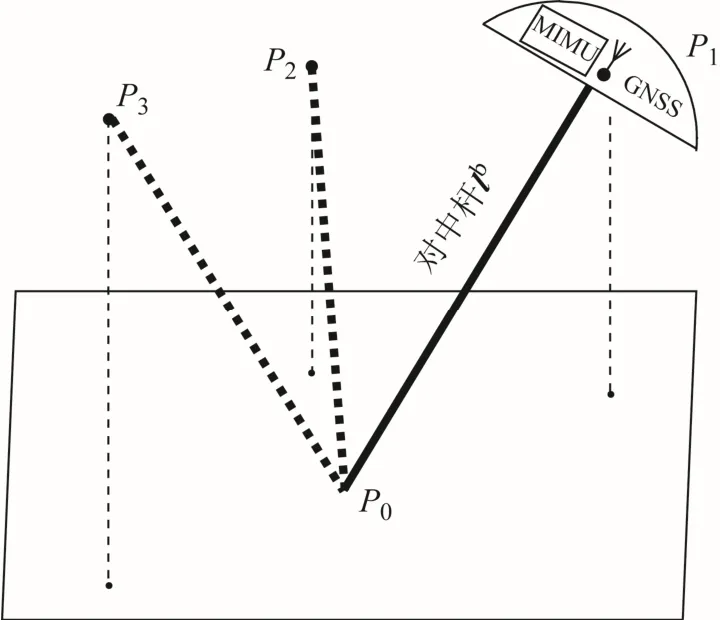
图1 对中杆及其3次角位置倾斜放置示意图
当对中杆放置在地面上处于某倾斜位置 Pi时,假设对中杆下尖点 P0与地面接触的3维坐标为,对中杆上端GNSS接收天线相位中心点 Pi的理想3维坐标为;惯导输出的理想姿态阵为。则有

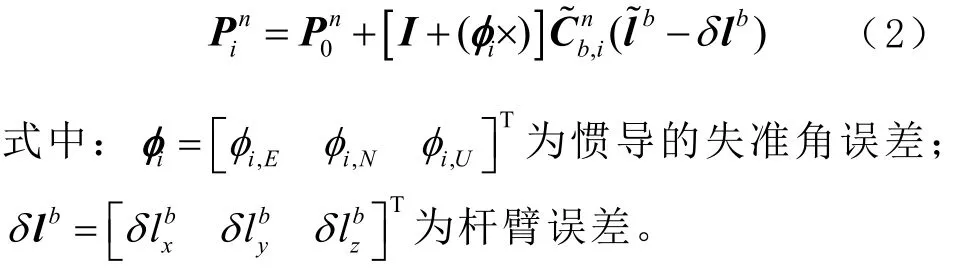
将式(2)展开并略去关于误差的2阶小量,可得

保持对中杆下尖与地面接触点不动,先后进行2次倾斜测量,分别记为,将它们作差,参考式(3)可得

惯导经过加速度计调平后,通常水平失准角φi,E和φi,N都比方位失准角φi,U小得多,若忽略φi,E和φi,N,则式(5)可近似为
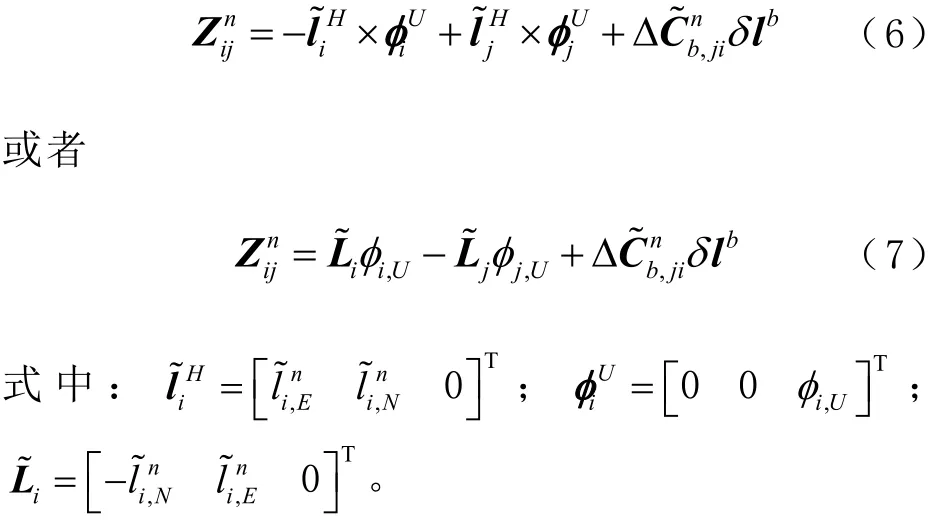
式(7)含有5个未知误差参数,无法通过1个测量方程求解。若进行了3次测量,分别记为 P1n、,则根据式(7)可构造2个测量方程并组成方程组,即
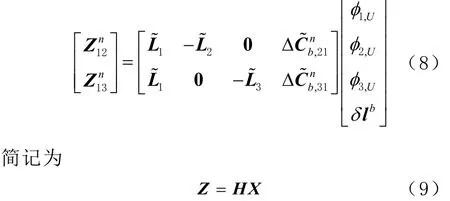
当对中杆下尖不动且倾斜某一固定角度时(比如与铅垂线夹角为30°),其空间运动轨迹形成1锥面,在锥面上均匀选取3个测量点,以此构成的测量矩阵H是可逆的,这时由式(9)可直接求得未知参数X,即

如果方位失准角φ,iU不是小角度,则通过多次迭代修正的方法也能求解得正确的方位角,实现大方位失准角下的方位初始化。
特别地,假设 MIMU的z轴平行于对中杆安装,这时对中杆仅沿伸缩方向存在杆臂误差,即有再假设测量时间比较短,即陀螺漂移引起的方位失准角φ,iU变化不大,可将其视为常值φU。则通过2次测量可得到测量方程为

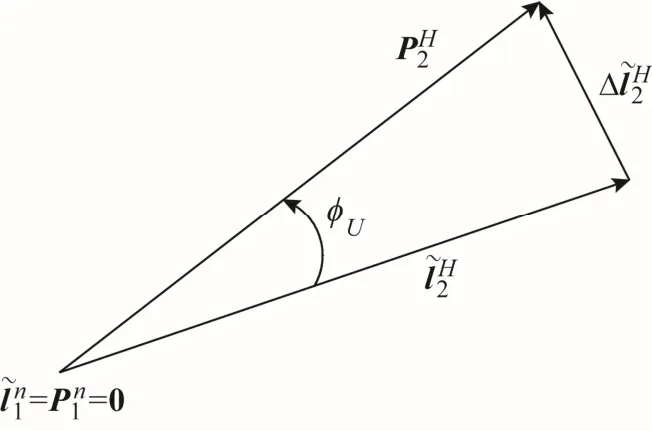
图 2 l~ 2H和 P 2 H 之间的夹角
2 误差分析
2.1 定位误差分析

然而,根据式(3),理论上有

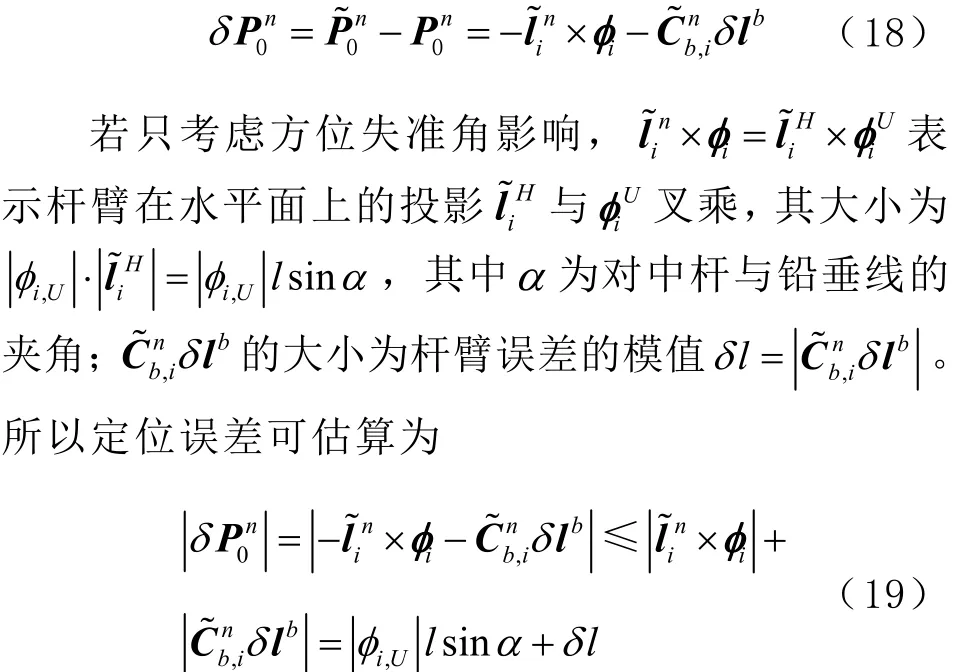
式(19)表明:方位对准误差与对中杆标称长度误差都会对下尖点的测量计算造成影响;实际应用中杆臂矢量应当标效准确,一般可达到毫米级精度,对于厘米级测绘要求而言,杆长误差通常可以忽略不记。因此,方位对准精度在MIMU惯导倾斜补偿方案中非常重要。
2.2 方位对准误差分析
不考虑杆臂误差,式(14)为根据2倾斜位置计算方位失准角的公式,重写为



比如,当σ=1 cm、l=2 m和α=30°时,经计算方位对准的标准差为
3 实验与结果分析
试验系统主要包括载波相位差分 GNSS、MIMU惯导系统、对中杆、数据采集笔记本和蓄电池,参见图3。其中,GNSS子系统包含基站和移动站,移动站接收机采集频率 5 Hz,水平定位静态精度约为0.7 cm(1倍标准差σ);MIMU数据采集频率 100 Hz,陀螺仪零偏稳定性约为 30(°)/h,加速度计零偏重复性约为 2 × 1 0-3g( g =9.8 m/s2)对中杆顶端 GNSS天线相位中心距离下尖长度1.897 m;笔记本同步采集GNSS定位与MIMU惯性传感器数据,做事后分析,步骤如下:
1)由 MIMU输出采用 Mahony算法进行调平[8-9],倾斜角α变化参见图4,在对中杆3个倾斜位置 P1、P2和P3处求得姿态阵,不妨将方位角都设置为0;
2)根据式(10)迭代求解失准角初始值φ3,U,再计算姿态阵 Cn;b,3
3)以位置误差为量测建立15维的惯导/GNSS组合导航模型[10],从倾斜位置P3开始进行组合卡尔曼(Kalman)滤波;
4)保持对中杆下尖不动,将对中杆在不同方向上倾斜不同角度,每次在倾斜平稳时进行GNSS定位测量,利用式(16)计算下尖处P0的定位值。
整个试验过程中,对中杆倾斜角α变化如图4中实线所示,倾斜角在0~40°之间变化,从180~450 s的离散点为20个不同倾斜角度下计算的P0点的3维定位误差。定位误差统计如表 1所列,结果显示:水平和高度的定位最大误差为 1.25 cm,其中误差以均方根(root mean square,RMS)表示。
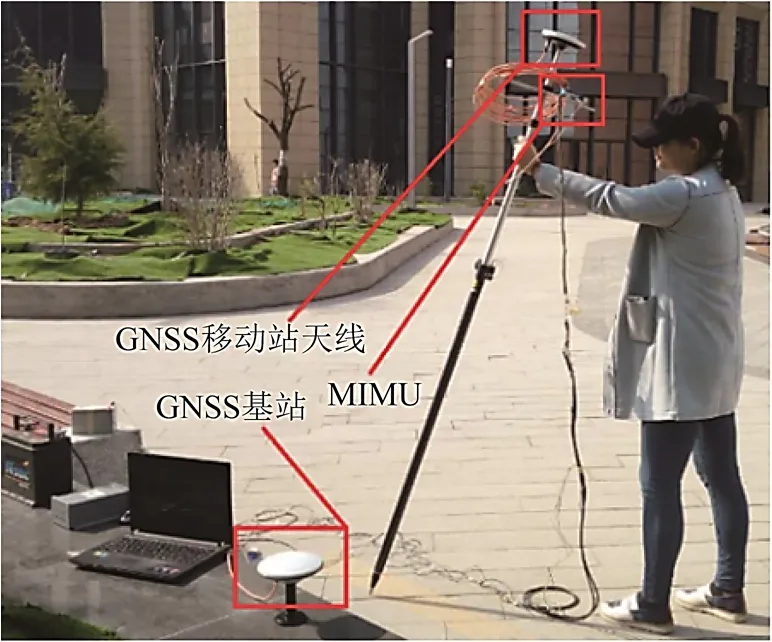
图3 试验系统配置
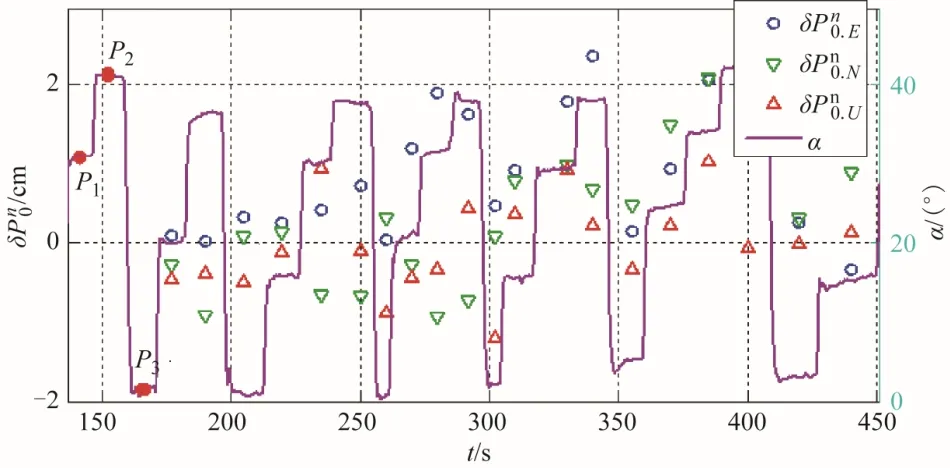
图4 对中杆倾斜角变化与定位误差
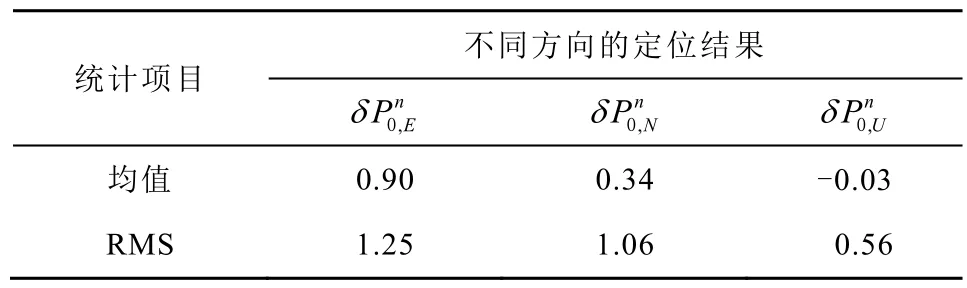
表 1 定位误差统计 cm
4 结束语
利用 MIMU惯导辅助 GNSS进行 RTK测量作业,能够有效补偿对中杆倾斜时产生的误差,获得满足精度的点位坐标和高程,但其前提是需对MIMU惯导进行正确初始化,MIMU惯导的姿态精度特别是方位精度决定了对中杆倾斜误差补偿的效果。本文给出了3点法求解初始方位角的算法,同时也给出了简化的2点法算法,应用该方位初始化算法后,实测结果表明:即使对中杆的倾斜角超过 40°,RTK测量的水平定位精度优于1.25 cm;反过来看,定位结果也间接验证了方位初始对准算法具有较高的精度。
