NIKON NSR 步进重复光刻机对准原理及典型故障修复
2022-07-13李远林
申 强,刘 磊,曹 鑫,李远林
( 中国电子科技集团公司第五十五研究所, 江苏 南京210016)
在半导体芯片生产制造过程中,光刻工艺被认为是最关键的步骤,其决定了所生产半导体器件能够达到的极限尺寸,即分辨率。一片硅圆片,在整个前道生产流程中,要经历多次曝光工艺。从截面来看,整个圆片是逐层的,层与层之间,在水平方向,又有着严格的位置关系,即套准容差。
光刻工艺所能达到的技术水平,主要是由投入生产的光刻机决定。光刻机使用的曝光光源,主要决定了所能实现的分辨率;而光刻机的对准系统,就决定了不同层曝光工艺的套准精度。不同厂家,不同型号的光刻机,对准系统的工作原理大致相近,最终都是实现掩模版与圆片之间特定标记的对准。本文以NIKON NSR 步进重复光刻机为参考,论述了对准系统工作原理,包括掩模版对准和圆片对准,并列举了常见的对准方面的设备故障及解决方法。
1 对准流程
NIKON NSR 步进重复光刻机采用的是分开对准的方式,先进行掩模版对准,后进行圆片对准(如图1 所示)。曝光工艺开始后,掩模版被传送至预对准模块,对掩模版的X、Y、θ 方向进行初步校正。被传送至承版台上后,开始进行掩模版精对准和掩模版对准检测,最终确定掩模版相对于承片台坐标系的坐标。掩模版对准流程全部完成后,圆片在传输模块找到平边后,被传送至承片台上,根据程序内设定的对准方式,完成圆片对准。承片台和承版台坐标系之间的关系以及机台内保存的机器常数,最终确定掩模版和圆片之间的位置关系,进行曝光工艺。图1 流程内的“工件台重置”和“基线检查”,可以理解为执行对准动作前的准备工作,本文不做详细论述。

图1 光刻机对准流程图
2 对准系统结构和原理
了解对准系统的结构排布,对掌握其工作原理有较大的帮助。同时,对解决设备运行过程中产生的对准方面的故障的排查和处置也有较大指导意义。其中,最难理解的就是对准的光路系统,图2 显示了整个对准流程中的主要光路传播路径以及所使用的光学元器件。
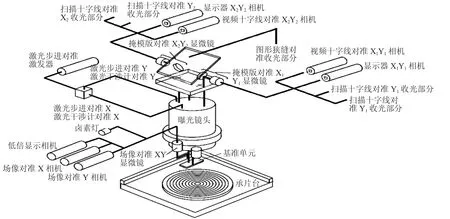
图2 对准光学系统示意图
基准单元(Fiducial Mark),是一个包含多种标记(LSA、FIA、SRA、VRA、ISS 等)的集合体,固定于承片台上。作为对准媒介,在NIKON NSR 步进重复光刻机对准过程中起到了至关重要的作用[1]。基准单元在承片台坐标系内有一个特定的坐标。通过掩模版对准,建立了掩模版与基准单元内相应标记的位置关系,而通过圆片对准,又建立了圆片与基准单元内相应标记的位置关系。如此,就可以确立掩模版与圆片之间的位置关系。
2.1 掩模版对准
在单个曝光工艺过程中,掩模版对准包含搜索对准和精对准两个过程,由于两者使用的光路器件和对准原理相同,因此本文中统称为掩模版对准。
掩模版对准采用的是扫描十字线对准方式(Scanning Reticle Alignment,SRA)。根据系统参数,承片台移动,使基准单元内的掩模版标记处于特定的位置。从汞灯分支过来的一路光,从基准单元的下方往上发出,分为X1Y1和X2Y2两路光,穿过曝光镜头后打在掩模版左右两侧的十字标记附近。光透过掩模版后被掩模版对准显微镜接收,分别通过单向滤光狭缝,生成X 或Y 方向的光,最后被对应的十字线对准传感器接收(见图2)。扫描十字线对准传感器是光电倍增管,接收到光后,由高压包对4 支分路(X1/Y1/X2/Y2)提供瞬时400 V左右的高压,将光信号转换成电信号。
在对准过程中,承片台到位后不再移动,承版台沿X/Y 向微动扫描(如图3 所示)。由于掩模版两侧的镀铬十字标记不透光,在承版台移动的过程中,十字线对准传感器所接收到的光强会产生由强到弱再到强的明暗变化,当处于某一特定位置时,刚好完全挡住从下方标记发出的光而导致传感器所接收到的光信号最弱的时候,认为此处为对准位置。根据读取到的当前承版台激光干涉计,可以确定掩模版对准时处于承版台坐标系内的坐标。

图3 温区闭环控制原理图

图3 扫描十字线对准原理图
2.2 掩模版对准检测
掩模版对准完成后,后续会进行掩模版对准检测,包括视频十字线对准检测(Video Reticle Alignment Check,VRA) 和图形狭缝检测(Image Slit Check,ISS),其主要作用是检查掩模版对准结果,形成闭环,并确立掩模版在承片台坐标系内的坐标。
2.2.1 视频十字线对准检测
图4 所示为该检测方法的光路和原理,使用图形识别技术,掩模版对准完成后,承版台保持不动,根据系统内保存的参数,移动承片台,使基准单元内的视频十字线对准标记处于正确的位置。汞灯光从基准单元下方向上发出,穿过曝光镜头后,通过对焦功能,将基准单元上的视频十字线对准标记投影在掩模版下表面,再透过掩模版后由对准显微镜传送至视频十字线对准相机。通过对比掩模版标记中心和基准标记中心之间的位置关系,计算出前者相对于后者的偏移量和旋转量。在执行曝光之前,会对位置偏移和旋转进行校正,实现精确套准。

图4 视频十字线对准检测原理图
2.2.2 图形狭缝检测
图形狭缝检测原理如图5 所示,该标记是分为X 和Y 方向的狭缝,汞灯光从包含图形狭缝检测标记的基准单元下方向上发出,形成狭缝光束,穿过曝光镜头后并放大,聚焦后投影在掩模版下方,临近掩模版镀铬十字标记。掩模版保持不动,承片台在此位置附近微动扫描,当光打在掩模版透明区域时,传感器接收到的光最多,信号最强,而在承片台扫描过程中,当狭缝光束完全被镀铬标记挡住时,传感器接收到的光最少,信号最弱,认为对准。因此传感器上会产生由强到弱再到强的光电信号,通过读取到的当前承片台激光干涉计,可以计算出掩模版标记在承片台坐标系内的坐标。

图5 图形狭缝检测原理图
2.3 圆片对准
圆片对准包括激光步进对准(Laser Step Alignment,LSA)、场像对准(Field Image Alignment,FIA)和激光干涉计对准(Laser Interferometer Alignment,LIA)三种对准方式。由于最后一种对准方式是选配功能,大部分机台并不配置相关元器件,因此本文不做论述。
2.3.1 激光步进对准
激光步进对准光路和原理如图6 所示,采用暗场下的激光衍射技术[2]。承片台移动至标记位置,从He-Ne 激光器发出的相干光,波长为633 nm,被叉分成X/Y 方向,穿过光路镜组和曝光镜头后形成狭缝打在圆片标记附近,圆片标记是由间隔数微米至数十微米的方形凸起阵列组成。承片台在此位置附近微动扫描,当激光扫过圆片标记时,由狭缝原理产生光的衍射现象,入射光被分解成0、±1、±2、±3……级光。衍射光和散射光沿原入射光的光路返回,经过反光镜和滤光镜后,包含位置信息的±1 级光被传感器接收。在扫描的过程中,激光狭缝通过单排标记时,会产生由弱到强再到弱的衍射光,电路系统会接收到同样变化的单峰信号。根据标记排布,会产生多个重复的单峰信号。如果标记衍射光与入射光相关联,那么此时产生的单峰信号即为标记对准信号。通过读取激光干涉计,系统记录下当前的承片台位置坐标。

图6 激光步进对准原理图
2.3.2 场像对准
场像对准使用的是离轴图形识别技术,如图7 所示,承片台移动至对准标记刚好位于圆片场像对准显微镜下方的位置,从卤素灯叉分的一路光源,通过曝光镜头外部的光路,打在标记上,反射后被场像对准显微镜捕捉到,最终传送到场像对准相机。安置于对准显微镜内的指引标记,被LED 光源照亮,同时被传送至场像对准显微镜,共同产生对应的视频模拟信号。系统自动对比圆片上场像对准标记和指引标记的中心坐标偏差,计算出水平方向上的偏移和旋转,从而计算出圆片标记在承片台坐标系中的坐标。

图7 场像对准原理图
激光步进对准采用激光照明方式,光线在衬底和光刻胶之间多次反射产生标记附近的相干条纹,易错误反应标记的位置,得到虚假的对准信号。尤其是在金属溅射层上,表面较粗糙且标记易产生不对称变化,对准效果较差。场像对准采用了宽频非相干的卤素灯作为光源,明场成像[2],能够减少金属层上因为对准标记的非对称性引起的对位错误,但是作为一种图像处理方法,其缺点是不能很好地检测到对比度较低下的对准标记[3]。因此,在实际曝光生产中,要根据圆片当前曝光层表面状况,选取合适的圆片对准方式。
3 典型故障修复
本文主要针对NIKON NSR i11/i12 步进重复光刻机,对掩模版对准和圆片对准故障和异常进行了统计归纳,并列举了可能的原因以及相应的处理方法,如表1 所示。

表1 对准常见故障及处理方法
4 结束语
NIKON NSR 步进重复光刻机对准系统结构复杂,包括机械系统、控制系统、光学系统以及光电信号处理系统。本文通过对对准系统工作原理的简要论述,结合实际工作,提出了易出现的对准方面的设备故障,并列举了可能的产生原因以及解决方法。为相关设备出现类似故障时的快速修复提供了一定的技术指导。