基于分数阶微积分理论的最优导引律设计
2020-03-04刘新宇
顾 凯,金 岳,刘新宇
(北京航天微系统研究所,北京100094)
0 引言
研究与实践表明,比例导引法形式简单,调整方便,技术上易于实现,是目前应用最为广泛的导引技术[1]。但是在打击动目标时,由于缺乏目标的机动信息,在拦截末端视线角速率快速旋转,从而易导致末端过载突变的情况[2]。为了解决这一问题,众多学者进行了深入研究。文献[3]提出了一种基于目标机动补偿的增强型比例导引方法,该方法在比例导引法的基础上增加了目标加速度补偿项,从而降低了弹道末段的需用过载,但该方法需要高质量的目标加速,当目标加速度估计误差较大时,制导性能便急剧下降。文献[4]提出了一种滑模变结构制导律,该制导律对参数摄动和外界干扰不敏感,目标机动对其影响不大,但其存在抖振的问题,影响制导性能。文献[5]提出了一种H∞制导律,该制导律无需目标加速度信息,但Hamilton-Jacobi微分不等式的求解比较困难,工程应用尚难实现。
分数微积分把微积分的阶次推广到了分数领域,其反映的不再是点或局部的性质,而是综合考虑了历史和全局分布式的信息,即分数阶微积分具有记忆性。本文利用这一特点,同时结合最优控制理论,设计了一种分数阶最优导引律。该导引律继承了比例导引法良好的跟踪性能,且能够抑制视线角速率的快速旋转,从而能够解决比例导引法末端过载突变的问题。
1 分数阶微积分的定义
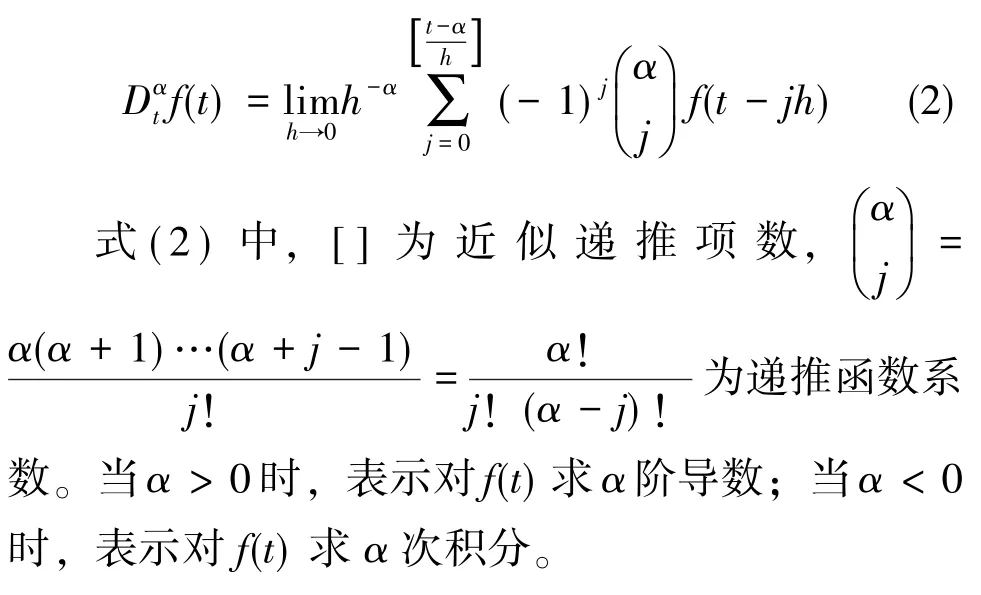
一般分数阶微积分的表达式为[6]

式(1)中,为微分或积分操作算子;α为微积分的阶次,可以是实数或复数;Re(α)为α的实部。
不同数学家给出的分数阶微积分定义形式有所不同,应用较多的三种微积分定义分别为Grünwald-Letnikov定义、 Riemann-Liouville定义和Caputo定义。
1.1 Grünwald-Letnikov(GL)定义
1.2 Riemann-Liouville(RL)定义

1.3 Caputo定义

式(4)中,m-1≤α≤m,Γ为gamma函数。当t>0时,若f(t)具有m+1阶导数,则GL定义和RL定义是完全相等的。GL定义采用极限求和的方式定义分数阶微积分,更适用于分数阶微积分的数值求解。Caputo定义采用求导和积分运算,更适用于理论分析。
1.4 分数阶微积分的性质
根据分数阶微积分的定义,可以得到分数阶微积分具有如下性质[7]:
1)分数阶微积分具有记忆性质。由分数阶微积分的定义式,函数f(t)在某一点上的分数阶微分与整数阶微分是不同的。分数阶微分并不是在这一点处求极限,而是与初始时刻到该点以前所有时刻的函数值有关,故分数阶微积分具有记忆性。
2)分数阶微积分具有线性性质,即

3)分数阶微积分具有叠加性质,即

4)解析函数的分数阶导数对t和α都是解析的。
5)当α=n、n为整数时,分数阶微分与整数阶n阶微分结果是一样的。
6)当α=0时,
2 分数阶微积分算子的数字实现
分数阶系统通常无法用确定的解析表达式表达,因此在仿真分析或工程实际应用中,需要采用数值求解的方法。目前,常用的数字实现算法包括:基于GL定义的短记忆法,基于Euler算子的PSE展开法,基于Tustin算子、Simpson算子和Al-Alaoui算子的 CFE展开法,以及递归式展开法。这些算法虽然在幅频特性上获得了较好的近似,但在相频特性上的近似精度不高。Oustaloup滤波器在频率响应中的幅频特性及相频特性均具有很好的近似,但在频率段端点附近的拟合效果并不理想。有学者研究了一种改进算法,提高了分数阶模型的拟合精度。本文采用改进的Oustaloup数字算法来实现分数阶微积分算子s±α的数值计算。

将该滤波器在Matlab上进行模块封装,如图1所示。
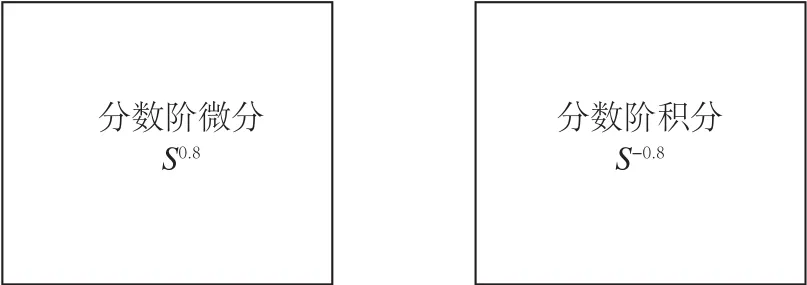
图1 分数阶微积分算子Fig.1 Diagram of fractional calculus operator
3 弹目相对运动模型
导弹的三维制导模型可以通过忽略耦合并将其分解到两个相互垂直的平面进行解决,本文以纵向平面为例建立了弹目相对运动模型,如图2所示,并做如下假设:
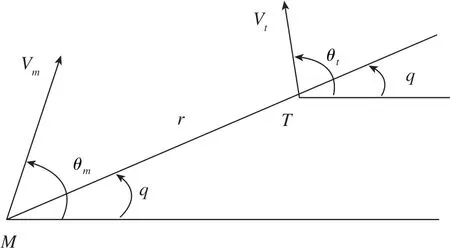
图2 弹目相对运动关系Fig.2 Diagram of relative motion relationship between missile and target
1)将导弹和目标均视为质点;
2)导弹的速度和目标的速度大小保持不变。
根据图2的几何关系,可以推导出导弹和目标的相对运动方程

对式(12)求导并将式(11)代入, 可得

式(13)中,Vm和Vt分别为导弹和目标的速度,q和˙q分别为弹目视线角和弹目视线角速率,θm和θt分别为导弹和目标的速度方向角。
在导引律的设计过程中,可将˙θm视为控制系统的输入,将含有目标未知信息的耦合量视为外部的扰动。因目标的运动信息难以获取,在导引律的设计过程中无法完成对扰动的补偿,从而导致传统的比例导引法在打击机动目标时会出现由于在弹道末端弹目视线角速率迅速增加而使所需过载过大的问题。为了解决这一问题,根据1.4节中分数阶微积分的记忆性和叠加性,设计了基于分数阶微积分的最优控制导引律。该方法以最小过载为性能指标,能够抑制弹道末端视线角速率的迅速增加,解决了末端过载过大的问题。
4 制导律的设计
将含有目标的未知信息当作外界扰动,则制导模型如下[9]



相比传统比例导引法,本文所设计的导引律含有视线角速率的分数阶微分项。由分数阶微积分记忆性可知,视线角速率的分数阶微分不只是某一点的微分项,而是包含了视线角速率从初始时刻到现在的所有历史信息[10],从而能够抑制视线角速率的突变,解决了比例导引法在打击机动目标时末端过载迅速增加的问题。
5 仿真验证
为了验证所设计的分数阶微积分最优导引律的正确性和有效性,本文在Matlab环境下进行了仿真验证,并与传统比例导引法进行了比较,导引律中的分数阶微分项通过上述封装的Oustaloup滤波器来近似实现。
仿真条件如表1所示。
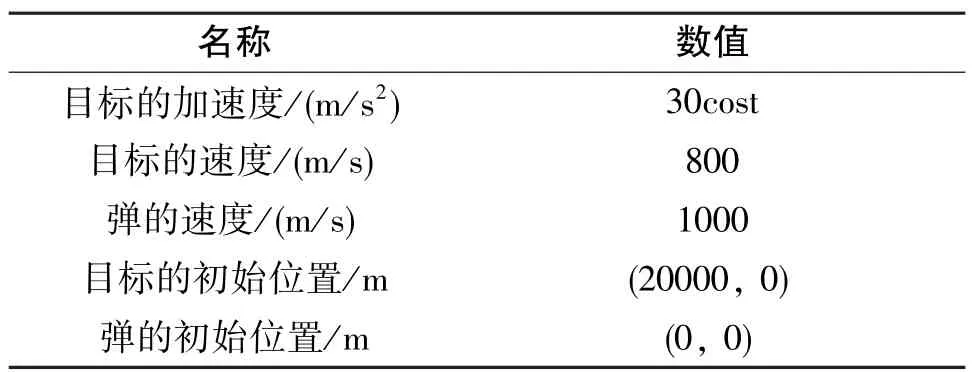
表1 仿真条件Table 1 Simulation conditions
比例导引系数K的取值范围为(2,6)[11],分数阶微分的阶次μ在(0,1)内取值。由分数阶微积分的性质可知,当微分阶次取整数时,分数阶微分与整数阶微分的结果是一样的。参数选取设为k1=K、k2=1-μ,即分数阶最优导引律的边界情况可以归结为比例系数K和K+1的情况,以此与传统比例导引法进行对比。根据文献[12],将本次仿真中的K设为3,采用遍历寻优法,μ的取值为0.8。
进行仿真验证,结果如图3、图4所示。
图3 拦截曲线Fig.3 Diagram of interception curves

图4 弹的过载曲线Fig.4 Diagram of missile overload curves
由图3可以看出,分数阶最优导引律能够保持传统比例导引法良好的跟踪性能,能够准确地命中目标。
由图4可以看出,在15s之前,分数阶最优导引律下的过载大于比例导引法;在15s之后,分数阶最优导引律下的过载明显小于比例导引法下的过载。由此可见,分数阶最优导引律的过载分布更为合理。在导弹命中末端,比例导引法过载值会突然增大,这在实际情况下往往无法达到,从而会导致脱靶。而分数阶最优导引律能够很好地解决这一缺陷,弹的过载在飞行的后半段几乎趋近于0,且在末端没有突变。分数阶最优导引律的命中时间为40s,K=3时的比例导引法的命中时间为42s,K=4时的比例导引法的命中时间为40.9s。由此可知,分数阶最优导引律能够更快地命中目标。
6 结论
本文将分数阶微积分理论与最优控制理论相结合,设计出了一种新的分数阶最优导引律。该导引律继承了比例导引法良好的跟踪性能,同时解决了比例导引法在打击动目标时末端过载突然增大的问题。仿真结果表明,相比比例导引法,分数阶最优导引律命中时间短,过载分布更为合理,且末端过载无突变,趋近于0。
