脉冲超声换能器声场测试系统的设计∗
2020-03-03张国才邢秀文谢小荣
张国才 游 泳 沈 洋 邢秀文 谢小荣
0 引言
脉冲超声换能器是超声检测中关键的部件,其声压分布特性对超声检测过程中缺陷的定位、尺寸大小的定量有极大的影响,因此对换能器的部分关键参数,例如探头近场、远场及扩散角等进行测量以实现对其性能做出评判的测试系统研究具有重要意义。
目前国内外测量超声换能器声场的方法主要有辐射力法、水听器法、光学检测法和小球反射法[1−3]等。其中小球反射法是传统方法[4−6],其结构简单,无需昂贵的水听器等传感器配置,所测量的声场分布与换能器检测系统在实际应用过程中的工作方式也最为接近,作为反射体的小球在声场扫描设备中最廉价且易于获取,仍是目前较为常用的一种方法。因此,项目组基于小球反射法设计开发了一套精度较高、成本较低且功能齐全的声场测试系统,利用该系统对超声换能器声场进行测试,结果与理论计算[7−11]基本一致。下面详细介绍声场测试系统各个细节并举例分析换能器声场测试的结果。
1 声场测量原理简述
小球反射法声场测量原理是利用收发两用换能器接收由它本身激发并被小球反射的声场声压,并把此声压幅值当作是换能器声场中小球球心所在位置的声压幅值[4]。脉冲超声换能器声场测试过程中,作为反射体的不锈钢小球固定不动,扫查架带动待检超声换能器进行空间移动。为了避免盛液容器的底面反射影响[7],不锈钢球离侧面距离设计为60 mm。文献[5]中指出,小球尺寸对声场声压分布的测量精度有较大影响,小球直径越小,所测量的声压分布越能反映出声场的真实分布情况,因此,系统所采用不锈钢小球直径为2 mm,支杆直径为1 mm。
2 声场测量系统
声场测量系统包括硬件及软件两子系统,系统设计采用了虚拟仪器及单片机技术,系统的程控交互界面采用美国国家仪器公司研制开发的图形化编程软件LabVIEW 来设计,在程控交互界面程序中通过调用动态链接库(Dynamic link library,DLL)与系统核心硬件超声发射接收卡进行数据通信及对其功能进行设置,同时通过RS232 串口与下位机单片机通讯,实现对三轴扫查平台的多种扫查方式控制。该系统可实时显示脉冲超声换能器声压分布图像,并可通过所采集的声压分布数据实现对换能器水中近场长度及声束扩散角等参数的测量。
2.1 硬件系统设计
声场测量硬件系统框架设计如图1所示,系统硬件主要包括工控机、CTS-04PC 多通道PCI 超声发射接收卡、STC891C51 单片机、57 步进电机及ZD-6560-V4 型驱动器、三轴扫查平台及水槽等5部分。
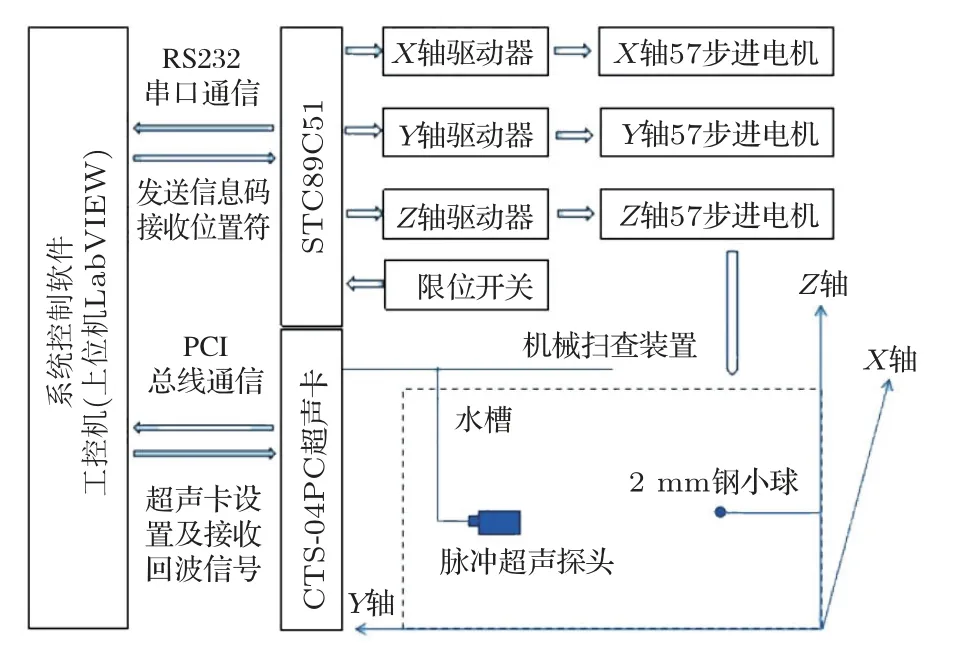
图1 声场测量硬件系统设计Fig.1 Design of hardware system for acoustic field measurement
声场测量的精度与丝杆滑台及步进电机、驱动器的性能参数密切相关。为适应换能器声场测量,三轴扫查平台丝杆型号选型为1610型丝杆,其外径为16 mm,导程为10 mm,连接4 台57 步进电机。电机搭载3 台高性能步进驱动器(ZD-6560-V4),分别与3 个扫查方向电机连接。驱动器采用共阴极接法,步进细分设置为16细分,电流设置为0.3 A。经过多次测试表明,能确保扫查精度及输出扭矩,扫查过程中不失步。结合单片机技术,扫查精度可选3 mm、1.5 mm及0.3 mm三挡。
CTS-04PC 多通道PCI 超声发射接收卡是系统核心硬件,该卡具有四通道,重复频率最高每通道2 kHz,频带宽度0.5~15 MHz,采样频率100 MHz,方波激励,0~-300 V 可调,可驱动常用的工业用脉冲超声探头。为节约系统开发整体成本,在满足系统精度要求前提下,系统以STC 系列的8 位单片机作为下位机。
2.2 软件系统设计
软件系统包含上位机及下位机程序。在上位机前面板编程中采用选项卡控件,主要执行参数设置及显示功能。前面板分为3 个选项,依次为超声发射接收卡参数设置、扫查控制方式设置及扫查平面声压强度图显示。交互界面简洁且易于操作,可在3个选项中灵活切换。
2.2.1 上位机前面板设计
超声发射接收卡参数设置界面如图2所示,包括发射电压、重复频率、增益、闸门、帧压缩比、零点、声程等参数设置。机械设置界面如图3所示,包括单轴调整、扫查平面选择、扫查精度、多轴调速及VISA 串口通道选择等参数设置。为了方便调试卡参数,同时在这两个界面放置了A型脉冲显示界面,图像显示界面如图4所示,包括声压平面图像显示、图像保存路径及采集数据点数等。
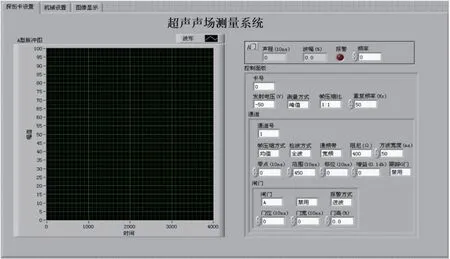
图2 卡参数设置Fig.2 Card parameter setting
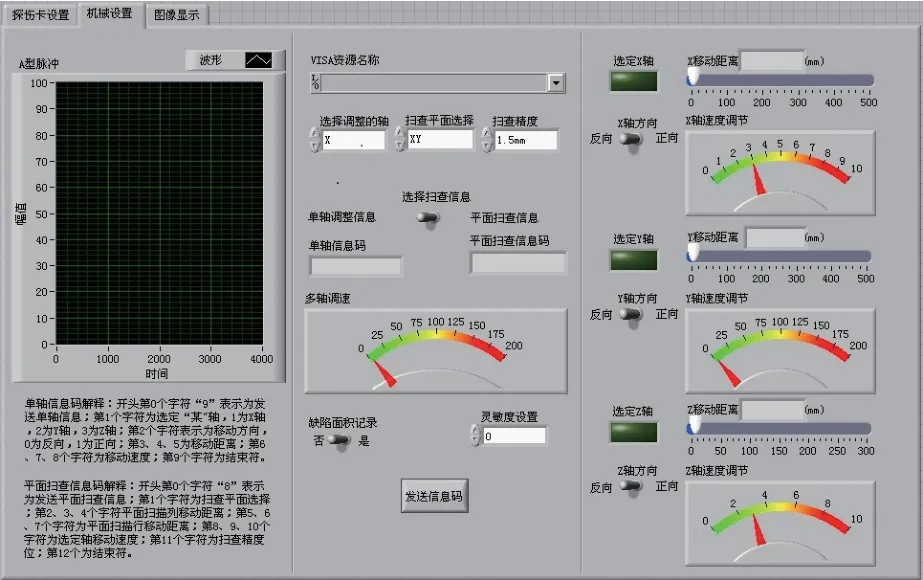
图3 机械设置Fig.3 Mechanical equipment
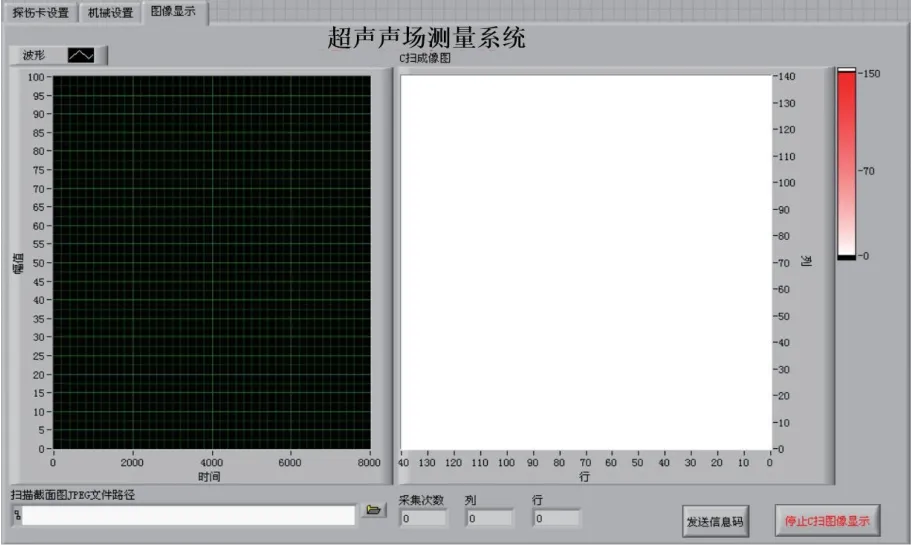
图4 图像显示Fig.4 Image display
2.2.2 上位机程序结构设计
上位机程序运用了多种程序结构,例如对触发事件进行监控的事件结构、对卡参数及机械参数等进行设置的强制顺序结构等。如图5所示,程序启动时,先对超声发射接收卡及控制面板初始化,然后进入While 大循环,在大循环结构中放置两事件结构,事件结构1 触发事件包括发射电压、重复频率、增益、零点、报警参数等,事件结构2 触发事件包括3 个事件:单轴信息码、平面信息码及发送信息码等参数调整。当设置完事件1 或事件2 的参数后点击发送信息码将进入扫查循环While 结构,直至扫查结束才能退出此循环。
在扫查循环While结构中上位机不断接收单片机发送的换能器所在位置信息码并转换为平面坐标,在转化过程中同时将采集到的不锈钢小球的反射回波幅值一并填充到对应位置的平面坐标(二维数组)单元中,然后将回波幅值转换为对应颜色灰度值,并在图像显示面板上以强度图方式实时显示出来,如图12所示。
2.2.3 上位机与下位机通信信息码解释
程控交互界面通过VISA 串口与单片机通信,通信内容主要涉及扫查平面范围、扫查轴选择、扫查速度、扫查精度及位置标识符等信息。扫查信息包括单轴信息码及平面信息码。单轴信息码主要用来调整换能器的初始位置或按照规定轴方向检测。
上位机按照固定的方式对信息进行编码排序,信息码以字符串一次全部发送出去。下位机接收到字符串信息码后解码并赋值到相关的变量中。上位机编码过程中主要用到了“格式化写入字符串”、“连接字符串”等函数。
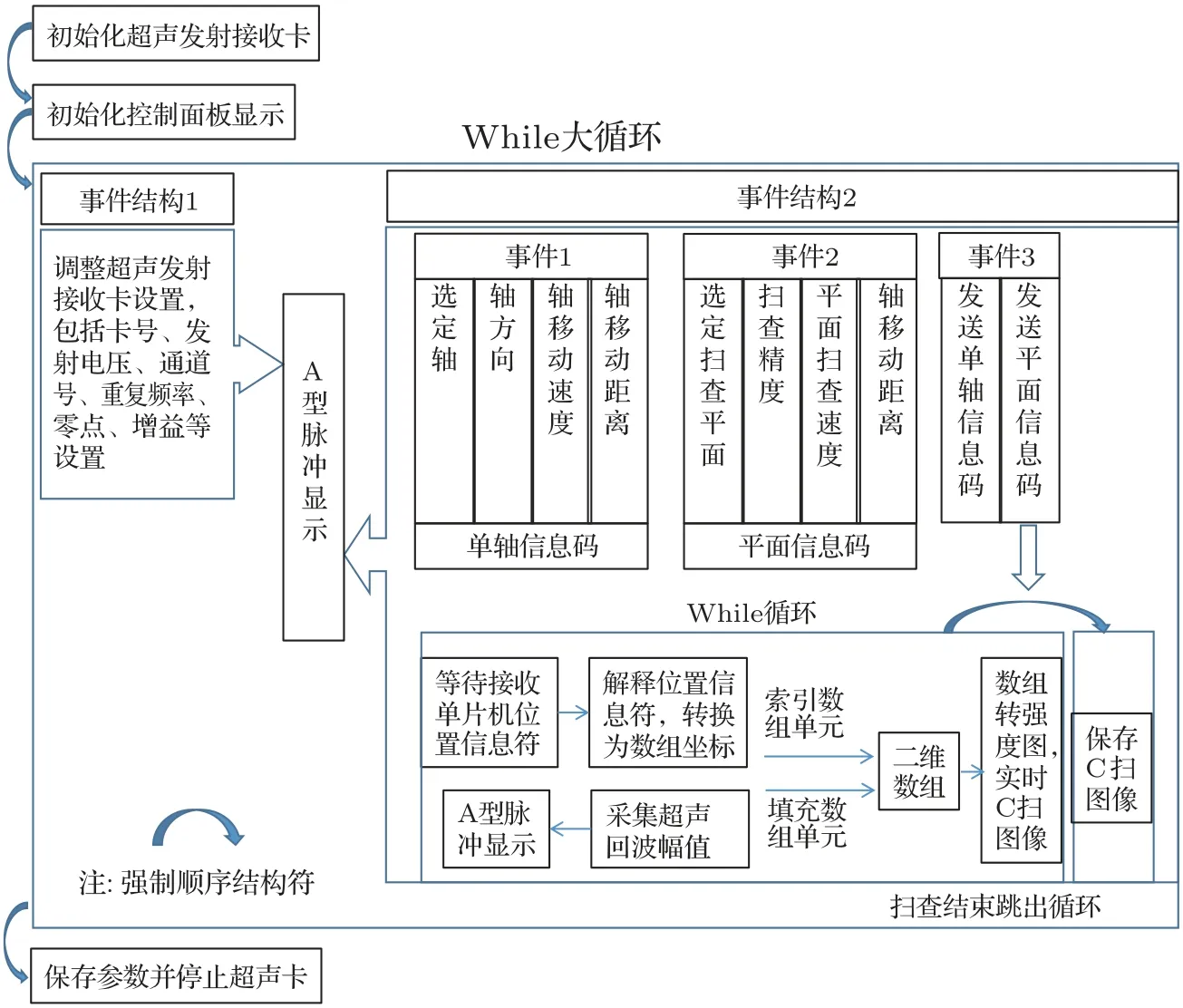
图5 LabVIEW 程序结构设计Fig.5 The design of upper computer program structure
图6是LabVIEW 中合成单轴信息码的程序图,采用枚举类型加条件选择语句实现对轴/轴方向/轴速度/轴移动距离的合成编码,最后以字符串发送给下位机单片机。单轴信息码字符串由10个字符连接成。例如发送字符串“9100352009”,其解释为向x轴反向以相对速度200移动035 mm,开头字符“9”为起始符,结尾“9”为结束符。
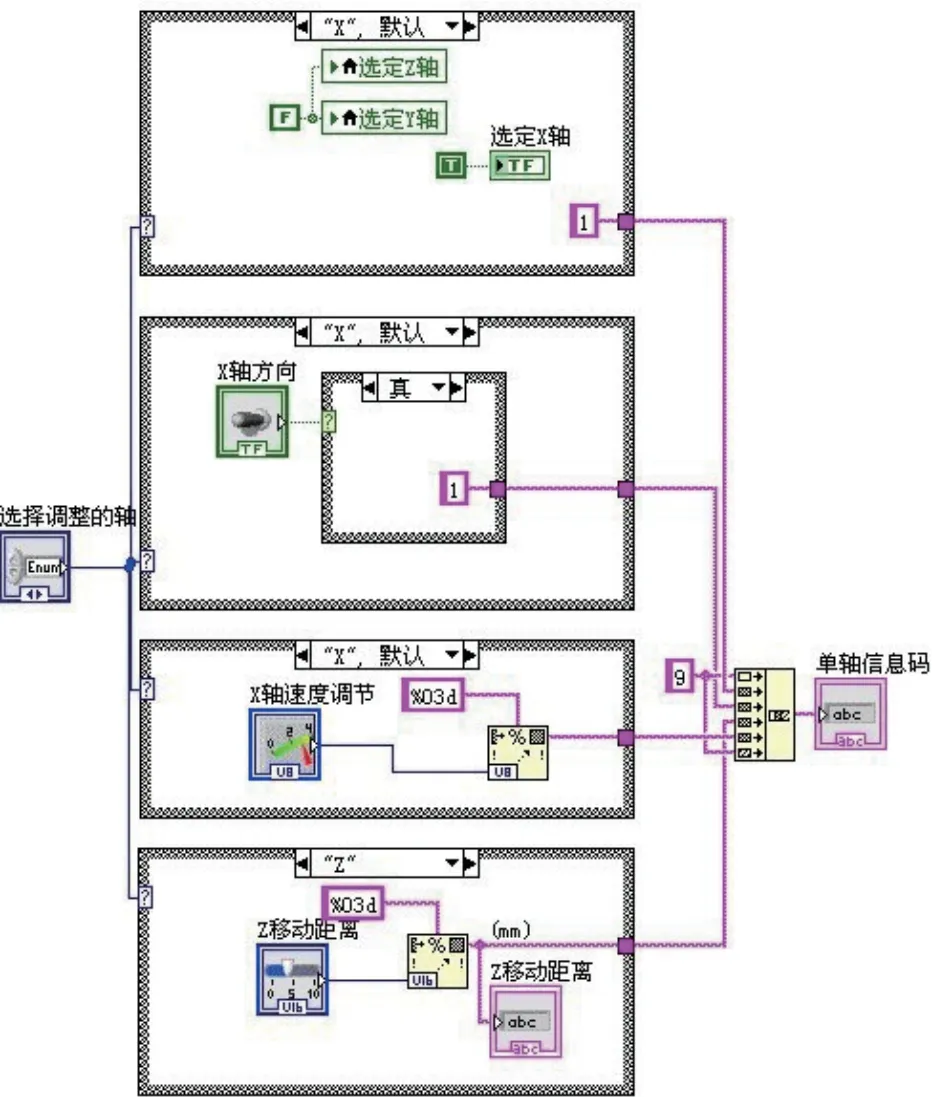
图6 单轴信息码Fig.6 Information code for a single axis
平面信息码包括了扫查平面选择、扫查速度及扫查步进精度设置,如图7所示,设置好扫查范围和扫查步进精度后将会自动生成一个二维数组,二维数组当中每一个坐标代表扫查平面的一个位置,探头在该位置接收到的脉冲回波声压将填充到该坐标值对应的二维数组中,最后构成该平面的声场声压分布强度图。
平面信息码字符串由13 个字符组成。例如发送字符串“8110020015019”,其解释为“8” 为起始符,首个“1”字符选择扫查xy平面,“100”为列扫查范围,“200”为行扫查范围,“150”为扫查速度,“1”表示扫查精度设置为“0.3 mm”,“9”为结束符。
2.2.4 上位机位置标识符解释及同步采集技术
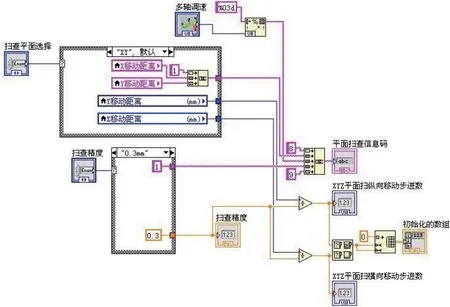
图7 平面信息码Fig.7 Flat information code
为了准确、真实地表达空间回波声压分布情况,必须保证待检换能器运动位置与小球反射回波信号同步。首先,为了获取扫查平面声压强度图,可以先按照每个方向的步进精度将待检平面网格化。例如,y方向及z方向步进精度选择为0.3 mm,待检yz平面面积为48 mm×180 mm,则待检平面划分为160行600列共160×600=96000个小格,每格为一检测单元。实际检测过程中,根据上位机扫查平面指令,单片机每发送一个步进长度指令给对应轴电机后马上通过串口发送当前位置标识符,如图8所示,上位机接收标识符后统计当前标识符个数并进行分析,统计目前换能器所在的行列位置。举例如下,当上位机统计到标识符个数为660 时,按上面扫查平面设置,其当前平面坐标行为660/160=4(求商);列为660%160=20 (求余)。即待检平面坐标为(4,20)。解释完坐标后再通过DLL采集当前小球反射声压幅值。所采集到的回波幅值逐个填充平面坐标对应的二维数组。换能器移动至某一位置并检测到回波幅值后再执行下一个坐标检测[8]。
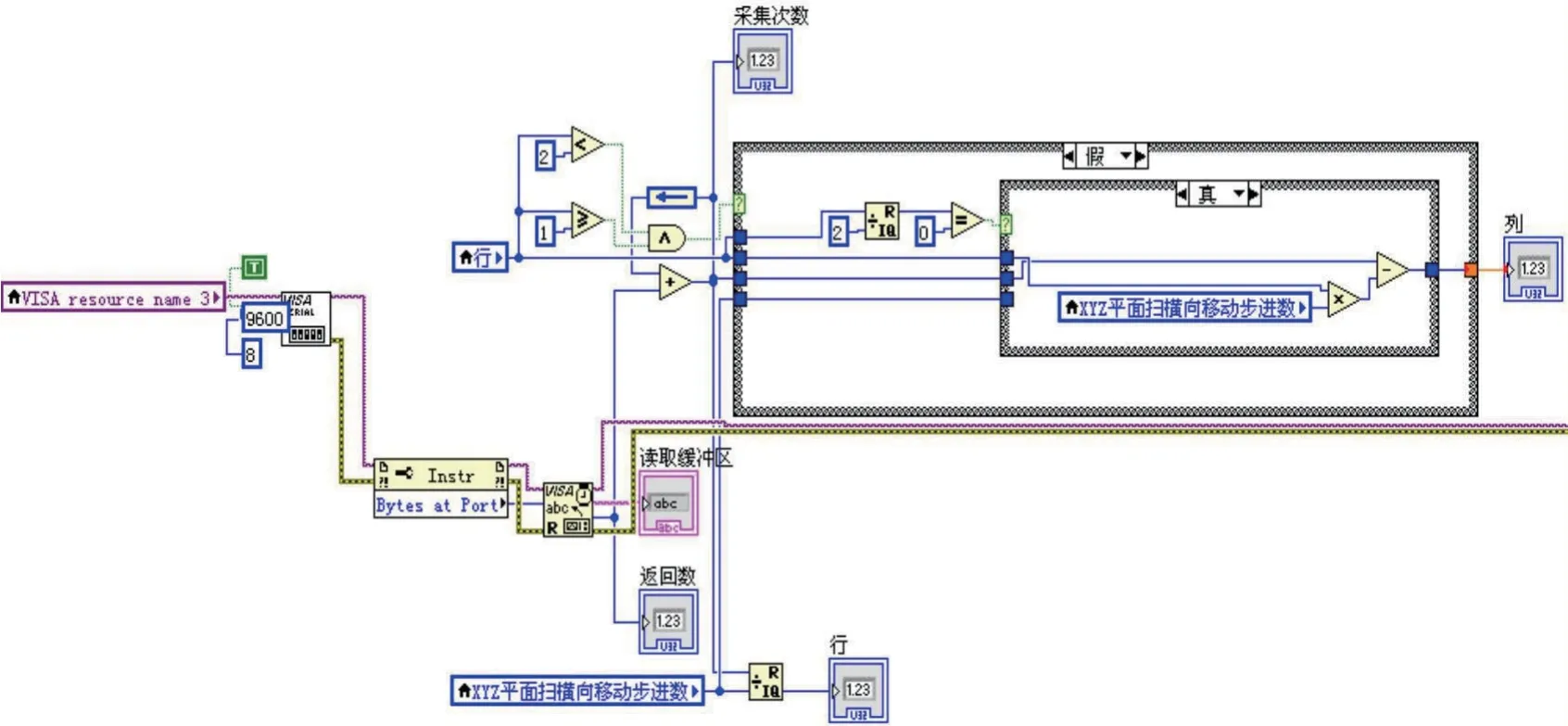
图8 位置信息码解释为坐标Fig.8 Location information codes are interpreted as coordinates
2.2.5 下位机程序设计
单片机与上位机(LabVIEW)端以异步串行方式通信,字符帧采用无奇偶校验位的10位数据帧格式,以9600 bit/s速率传送数据,单片机端接收上位机字符串并解析为具体执行指令。图9为单片机主函数程序结构图,图10为单片机中断函数结构图,中断函数不断监控上位机是否发送字符指令,由于单片机接收到的是ASCII 码字符串,需要先调用compile()子函数将字符串解析为对应数值并以一位数组保存单轴或平面信息码。根据LabVIEW 端如图6和图7编码规则可分别得到单轴或平面扫查的各个关键信息。

图9 单片机主程序Fig.9 MCU main program
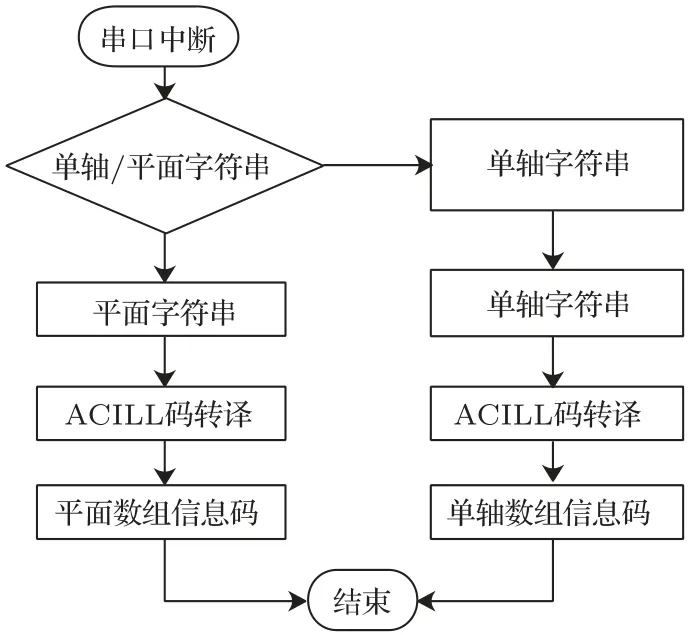
图10 中断函数Fig.10 Interrupt function
2.2.6 待检换能器空间轨迹规划
进行声场测量前需要对探头扫查路径进行规划。对于垂直声轴线平面上的声压分布的测量,可以分析其扩散角及垂直于声轴线的声压分布规律;对于声轴线所在平面上的声压分布的测量,可以分析其近场长度及声轴线上的声压分布规律。扫查路径选择往复步进(Zig-Zag)方式,扫查主方向选择为平面边长较长方向如图11所示,这样电机的姿态调整范围较小,同时可以获得更快的扫查速度。
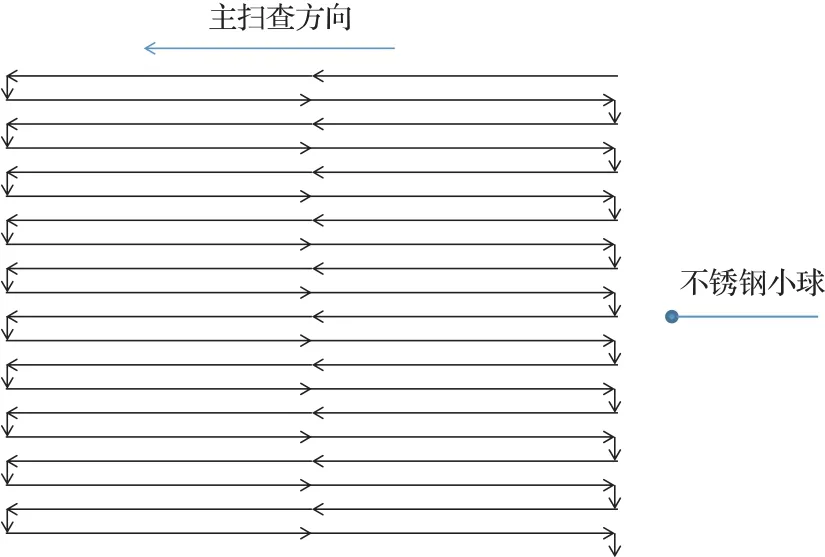
图11 声轴线所在平面(Zig-Zag)扫查轨迹规划Fig.11 Scanning trajectory planning on the plane of acoustic axis (Zig-Zag)
3 探头声场检测实例及结果分析
测试案例中脉冲超声换能器选取国内两不同厂家生产的2.5P14N 换能器,扫查平台搭载脉冲换能器做Y Z平面及XZ平面扫查。扫查步进精度选择是影响声场测量的关键因素,相关文献[12]指出,扫查步进必须满足小于一个波长长度。本文所测试的脉冲超声换能器中心频率为2~3 MHz,所激发的超声纵波波长为λ= 0.5~0.7 mm,因此各轴扫查步进精度设置为0.3 mm。根据反射小球的尺寸,同时考虑到探头离小球较近时小球有效反射曲面会对回波响应有影响,系统从距离不锈钢小球10 mm开始声场测量。
3.1 2.5P14N脉冲超声换能器声压分布
选取标称频率为2.5 MHz、晶片直径为14 mm的脉冲超声换能器作为测试对象,扫查平面选择过垂直换能器晶片圆心所在垂线平面,扫查平面短边距离换能器平面10 mm,扫查平面面积为48 mm×180 mm,扫查步进精度设为0.3 mm,在扫查平面上共测试96000 个数据点,测试得到的平面声压分布强度图如图12所示。
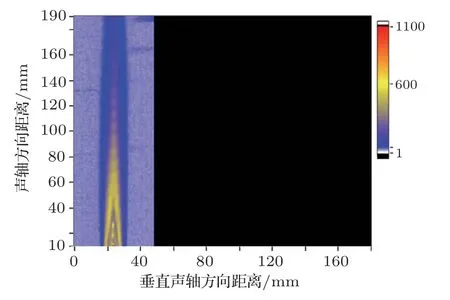
图12 2.5P14N 换能器声轴线平面声压分布图Fig.12 2.5P14N sound pressure distribution on the plane of transducer axis
从图12显示的声压分布可以看出,该款换能器声场指向性好,水中声场在垂直声轴线方向主要集中在换能器直径宽度14 mm 范围内。在距离换能器10~40 mm 辐射场中能量主要集中在换能器边缘两边,同时随着距离的增加,能量逐渐往声轴线附近聚集。在远场区,声能衰减较为迅速。
通过图13可实测出该脉冲换能器近场长度为57 mm,即游标0 所在位置。根据连续波所推导出的近场长度计算公式[13]可得近场长度N=D2/4λ= 73.83 mm,式中D为晶片直径;λ为水中纵波波长。实验室环境测得水中纵波声速为c= 1460 m/s,换能器中心频率实测值为f= 2.3 MHz,对比两数值,该脉冲换能器水中近场长度小于连续波理论所得数值。
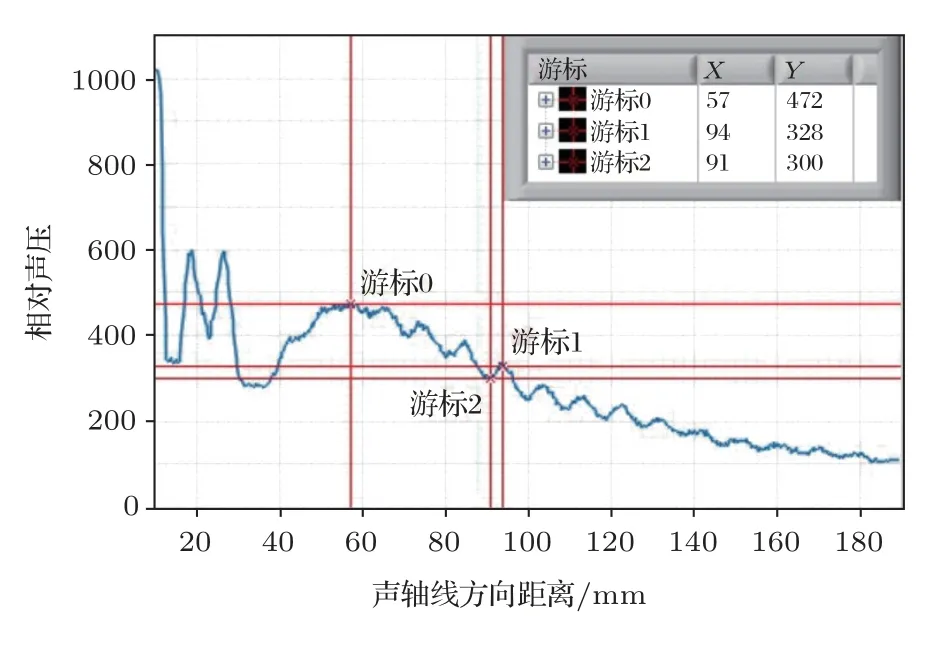
图13 换能器声轴线声压分布图Fig.13 Acoustic axis pressure distribution map of transducer
从图13~16可以看出,在近场区出现一系列极大极小值,实测现象与文献[14]中描述的观点一致,即声压极值点是由波的干涉造成的。连续波激发的声场波源各点辐射的声波在声场中某点产生完全干涉。实际测试的声场由脉冲波激励,脉冲持续时间很短,波源各点辐射的声波在声场中某点产生不完全干涉或不产生干涉,极值点减少。在大于近场长度外,只有一个极值点,如图14显示的距离换能器100 mm垂直声轴线声压分布曲线所示。
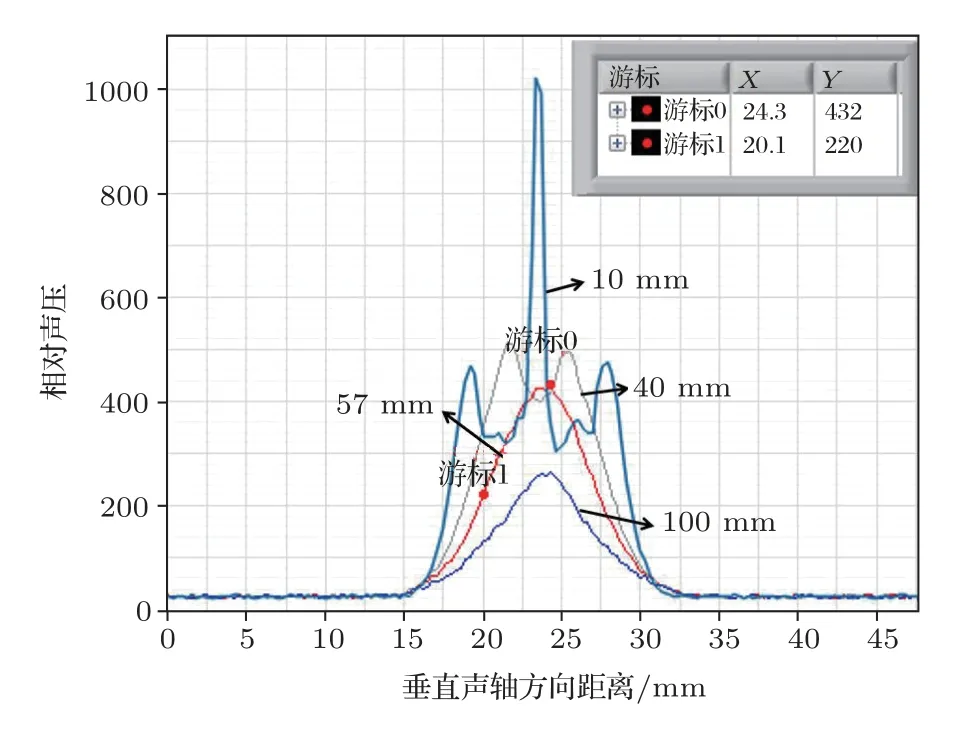
图14 垂直声轴线方向声压分布曲线Fig.14 Sound pressure distribution curve in the vertical axis direction
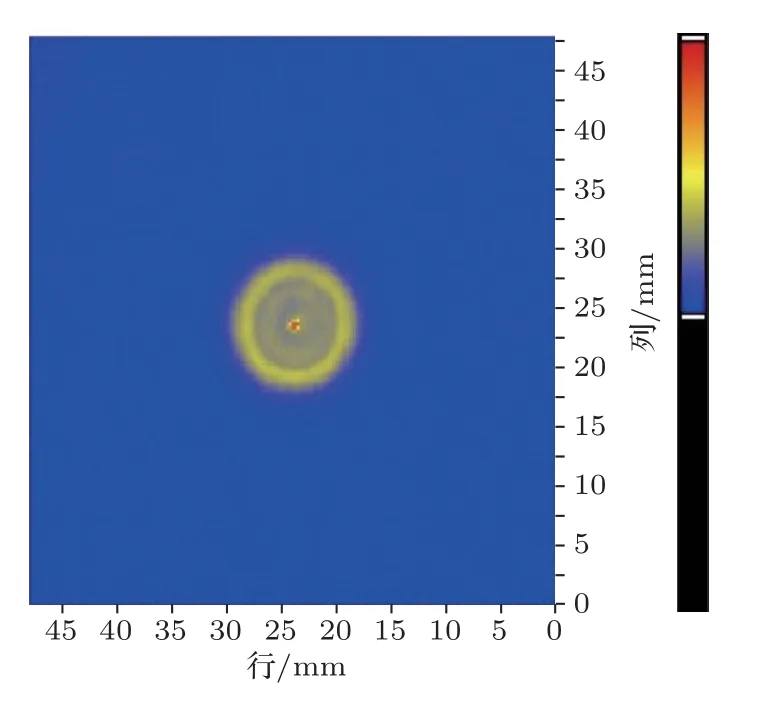
图15 10 mm 处垂直声轴线平面声压分布图Fig.15 Acoustic pressure distribution map of vertical axis at 10 mm
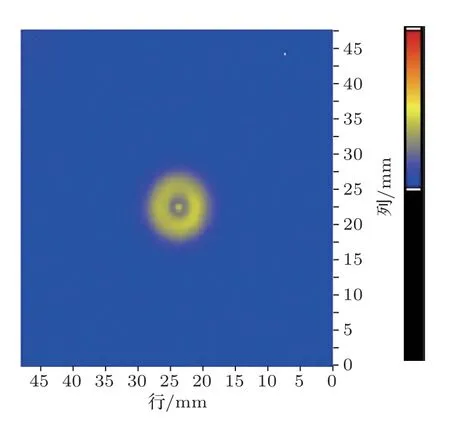
图16 24 mm 处垂直声轴线平面声压分布图Fig.16 Acoustic pressure distribution map of vertical axis at 24 mm
图13中可清晰看出在近场以外声轴线上声压随距离增加而减小的总体趋势,但是这种减小并不单调,而是锯齿状下降。游标1 与游标2 标注了距离小球91 mm 处的相对回波声压为300,而距离94 mm 处的相对回波声压为328,两者回波高度相差∆dB = 20 lg(H1/H2)= 0.775 dB,式中H为回波幅值。这一结论与文献[13]中描述的观点一致,即本现象对缺陷大小的精确定量是不能忽略的,这样会造成处于前一极小值处本来较大的缺陷的回波较低,而处于后一声压极大值处本来较小的缺陷的回波反而较高,容易引起误判或漏检。
在图14中选择距离小球57 mm 处(即一倍近场处)垂直声轴线声压分布曲线,可计算出声压幅度从轴线上最大值下降6 dB 时的声束扩散角[13]θ0= arctan(24.3-20.1)/57 = 4.22◦。在连续波理论中,圆形晶片半扩散角[13]γ=arcsin(Fλ/DS)=1.33◦,其中F= 0.51 为下降6 dB 时的常数因子,DS= 14 mm 为圆形晶片直径,f= 2.3 MHz 为连续波频率。对比以上两组数据发现,脉冲波声束扩散角比连续波理论扩散角大,其原因在于所测换能器为非窄脉冲探头,其低频分量使其能量发散。如果想要达到更好的声束收敛效果,可使用高频窄脉冲探头。
3.2 不同换能器声场分布比较
图17为另一厂家所生产的2.5P14N 换能器声压分布图,比较图12、图13与图17、图18可以看出,两者声场分布具有相似性,但在系统灵敏度设置完全一样的情况下,换能器2 接收到的整体声压幅值比换能器1 小。换能器2 在大于一倍近场63 mm 外仍然可以观测到干涉现象,而且干涉现象也较为明显,但在140 mm外其干涉现象已经不明显,可以近似认为随着距离增加声压幅值单调递减。
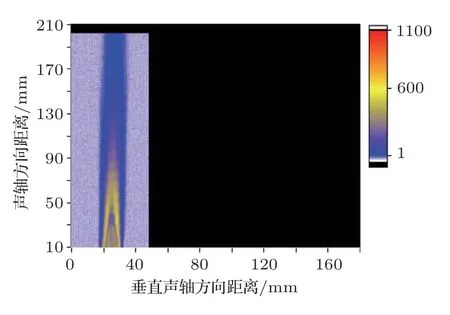
图17 换能器2 声轴线平面声压分布图Fig.17 Sound pressure distribution map on the plane of transducer axis
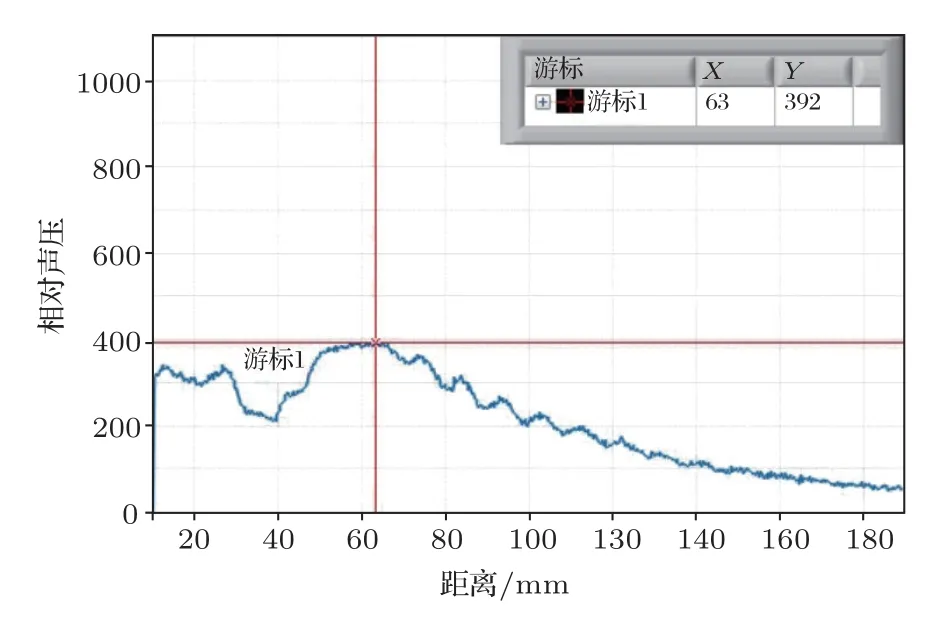
图18 换能器2 声轴线声压分布图Fig.18 Acoustic axis pressure distribution map of transducer
4 结论
文中详细介绍了一种脉冲超声换能器声场测试系统设计细节,该系统采用当前流行的虚拟仪器及单片机技术,测量结果表明该系统能很好地完成脉冲超声探头声场测试任务,能直观、实时显现出声轴线平面及垂直声轴线平面的声压分布图,通过对声压分布数据分析,可获得换能器近场长度及扩散角等关键参数值。该系统开发及后续维护成本较低、精度高、功能比较齐全,且具有运行可靠、性能稳定、操作界面友好等特点,系统的设计方案可为超声探头声场测试系统的开发提供一定参考。
