基于双侧图像识别的大蒜正芽及排种试验台设计与试验
2020-03-03侯加林李天华牛子孺李玉华
侯加林,田 林,李天华,牛子孺,李玉华
基于双侧图像识别的大蒜正芽及排种试验台设计与试验
侯加林,田 林,李天华,牛子孺,李玉华※
(1. 山东农业大学机械与电子工程学院,泰安 271018;2.山东省农业装备智能化工程实验室,泰安 271018)
针对现有大蒜播种机难以满足杂交蒜种“鳞芽朝上、直立栽种”农艺要求的问题,提出了一种基于图像识别的蒜种鳞芽识别与正芽方法,设计了大蒜排种及正芽试验台,实现了蒜种的单粒取种、图像采集、鳞芽方向识别、鳞芽扶正等功能。以杂交大蒜为试验对象,通过试验确定了影响蒜种鳞芽扶正效果的4个主要因素:通道宽度、电动机转速、拍摄距离、识别阈值,建立了蒜种鳞芽扶正率与试验因素之间的回归模型,模型决定系数2值为0.903 8,分析了各因素对蒜种鳞芽扶正率的影响,各因素对蒜种扶正率影响的显著性顺序从大到小依次为通道宽度、电动机转速、拍摄距离、识别阈值。并对试验因素进行了综合优化。最优工作参数组合为:电动机转速为18 r/min、蒜种通道宽度为38 mm、拍摄距离为8.6 mm、识别阈值为178时,蒜种鳞芽扶正率为90.56%,平均每粒蒜种识别用时0.29 s,满足大蒜播种机播种要求。该文结果可为解决杂交大蒜直立播种问题提供参考。
农业机械;模型;大蒜播种;设计;试验;鳞芽识别;鳞芽扶正
0 引 言
中国是世界上生产、出口和消费大蒜最多的国家,大蒜产量约为全球总产量的70%[1]。按照农艺要求,大蒜播种时需要调整蒜种鳞芽方向,使其根部向下、直立栽种。国外大蒜播种机[2-5]价格昂贵,且不能适用于杂交大蒜的机械化播种作业。国内大蒜播种机多采用机械式调头的方式调整蒜种鳞芽方向[6-11],这种机械对苍山大蒜播种效果较好,但对杂交大蒜机械化播种效果差,鳞芽扶正率低。由于杂交大蒜蒜种形状不规则,不符合重心位于蒜瓣下半部分[12]这一特征,难以使用机械式调头的方式对其进行扶正,杂交大蒜鳞芽扶正已成为制约大蒜机械化播种的主要因素。
近年来,机器视觉技术迅速发展,广泛应用于交通、农业、医学、工业等各个领域[13-16]。随着机器视觉技术理论和实践越来越成熟,机器视觉在蒜种识别方面也得到快速发展[17-23]。方春等[24]采用基于CNN的深度学习[25-26]方法,利用Python语言和Keras深度学习框架来编程实现计算机自动识别蒜瓣的鳞芽朝向,这种方法需要大量的蒜种样本进行训练,工作量大且对识别环境要求较高。郭英芳等[27]通过边缘检测算法对蒜瓣的形状特征进行提取,并把SUSAN角点检测算法运用到瓣尖识别中,当蒜皮有和蒜瓣尖角类似的尖锐突起时,该算法就不能准确识别瓣尖的位置。吴献等[28]采用一种观测窗的方法来识别定位蒜瓣的尖角位置,结合质心的位置得出蒜瓣的偏角,以上方法均处于算法研究阶段并未与硬件结合,都是基于试验条件下的蒜尖识别,对识别环境有较高的要求,在大蒜机械化播种时,由于识别环境差,干扰多,识别效果不理想。
本文以杂交大蒜为研究对象,采用双侧图像识别[29]技术,根据蒜种不同的头尾特征,识别蒜种鳞芽并对其进行扶正,为解决杂交大蒜直立播种问题提供有益参考。
1 系统结构与工作原理
大蒜排种及正芽试验台主要包括机架、调速电动机、传动机构、单粒取种机构(包含单粒取种勺与取种链条)、蒜种横向有序排列机构、图像采集机构、杠杆式蒜种扶正机构、地轮、蒜种箱等部分(如图1a所示)。
试验台工作时,由调速电机提供动力,电动机输出的动力经链传动输入单粒取种机构,单粒取种机构从种箱中进行单粒取种,取出的蒜种随取种装置运动至蒜种排列机构的最高点,取种勺翻转,蒜种落入蒜种通道中,在蒜种通道中实现横向有序排列,并随蒜种挡板一起向下做匀速直线运动。当蒜种运动至图像采集点时,触发U型光电传感器,触发蒜种通道两侧的USB摄像头各采集一张图像,处理器对采集到的图像进行鳞芽方向识别,控制杠杆式蒜种扶正机构对蒜种进行扶正。
2 机械系统设计
2.1 单粒取种与横向有序排列机构
单粒取种与横向有序排列机构的功能是从种箱单粒取种,并实现蒜种的横向排列。其组成如图1b所示,主要包括机架、调速电动机、蒜种箱、单粒取种勺、蒜种挡板、链轮、取种链条和蒜种通道等。单粒取种勺由蒜种挡板和2个容积不同的取种勺体组成,单粒取种机构工作时,调速电机驱动链轮运动,链轮带动安装在链条上的取种勺运动,取种勺经过种箱时通过大蒜种群相互挤压实现取种功能,由容积较大的勺体取出一粒或多粒蒜种,接着单粒取种勺翻转90°,取出的蒜种落入容积较小的取种勺中,由于取种勺容积较小,只能容纳一粒蒜种,多余的蒜种落入种箱中。单粒取种勺由螺栓固定于取种链条上,取种勺的间距为2个链节(38.1 mm),共26个取种勺。取种链条选用滚子链(链号12A,节距19.05 mm)。

1.单粒取种勺 2.取种链条 3.蒜种横向有序排列机构 4.蒜种箱 5.杠杆式蒜种扶正机构 6.调速电动机 7.图像采集机构 8.传动机构 9.蒜种挡板 10.链轮 11.动力链条 12.蒜种通道底板 13.蒜种通道宽度调节槽 14.蒜种通道 15. 机架
由于单粒取种机构取出的蒜种呈现为无序散乱状态,不利于蒜种鳞芽方向识别。为了降低蒜种图像处理和识别难度,提高鳞芽方向识别的准确率,需要对蒜种进行横向排列,使蒜种头尾正对着摄像头,本文针对这一问题,设计了蒜种横向有序排列机构。蒜种横向有序排列机构工作原理是蒜种离开单粒取种装置后,落入蒜种通道中,撞击蒜种通道与蒜种挡板,在蒜种挡板的支持力和重力作用下蒜种呈平行于挡板的姿态放置,并随蒜种挡板一起向下做匀速直线运动,实现横向有序排列。蒜种排列效果如图2所示。

1.蒜种通道底板 2.单粒取种勺 3.蒜种挡板 4.鳞芽朝右蒜种 5.磷芽朝左蒜种
2.2 图像采集与识别机构
图像采集与识别机构的功能是采集蒜种头尾图像,并将采集的图像传入处理器,识别蒜种鳞芽方向。其组成如图3所示,主要包括机架、电源、处理器、U型光电传感器、光电传感器触发装置、摄像头、图像采集通道等部分,图像采集通道对称安装于蒜种通道两边,蒜种通道与图像采集通道做遮光处理。

1.左侧采集通道 2.左侧摄像头调节槽 3.右侧摄像头调节槽 4.右侧采集通道
图像采集机构工作时,电动机驱动链轮运动,链轮带动安装在链条上的光电传感器触发装置运动,触发U型光电传感器(日本OMRON公司生产,型号为EE-SX674-WR),触发蒜种通道两侧的USB摄像头分别采集一张图像,处理器对采集到的图像进行鳞芽方向识别。光电传感器触发装置通过螺栓安装于取种链条上,每个触发装置间距为2个链节(38.1 mm),共26个触发装置,U型光电传感器通过I/O口与树莓派相连,2组USB摄像头(30万像素,摄像头自带6颗可调节亮度的LED补光灯)分别安装于蒜种通道两边的蒜种图像采集通道中,通过USB接口连接树莓派。
2.3 杠杆式蒜种扶正机构
杠杆式蒜种扶正机构用于蒜种鳞芽扶正作业,可保证大蒜播种时的直立率。其结构如图4所示,主要包括支架、电磁铁、调整叉、限位螺栓、扶正通道、继电器等部分。调整叉由左右2部分组成,可绕连接销在一定范围内摆动。杠杆式蒜种扶正机构根据蒜种鳞芽方向对蒜种进行扶正,当鳞芽位于调整叉右侧时,继电器闭合,电磁铁通电,向上提起电磁铁铁芯,带动调整叉向左旋转,右侧调整叉落下对蒜种进行扶正,如图4a所示;当鳞芽位于调整叉左侧时,继电器断开,电磁铁断电,在重力作用下,电磁铁铁芯落下,带动调整叉向右旋转,左侧调整叉落下对蒜种进行扶正,如图4b所示。通过调节左右两侧调整叉限位螺栓实现左右调整叉扶正位置的调整,扶正通道中的蒜种向下滑落经过蒜种扶正机构时,使调整叉接触蒜种鳞芽部位,在调整叉的作用下蒜种绕重心旋转,完成调头作业。

1.电磁铁 2.支架 3.限位螺栓 4.扶正通道 5.左侧调整叉 6.右侧调整叉 7.连接销
1.Electromagnet 2.Frame 3.Limit bolt 4.Adjustment channel 5.Left directing device 6.Right directing device 7.Pin
注:箭头方向为蒜种运动方向。
Note: Direction of arrow is the direction of garlic movement.
图4 杠杆式蒜种扶正机构示意图
Fig.4 Schematic of lever type garlic adjustment mechanism
3 控制系统设计
3.1 硬件设计
该系统以树莓派为控制核心,由电源模块、信号采集模块、控制模块、显示模块构成控制系统硬件,如图5所示。

图5 系统硬件结构图
所采用的控制器为嵌入式Linux树莓派3代B型处理器,运行基于Linux的开源系统,其体积小(82 mm× 56 mm×19.5 mm,50 g),功耗低,适于野外长期工作。树莓派3代B型采用64位1.2G主频的四核芯ARM v8处理器(Broadcom BCM2837),有1G的RAM,以SD/MicroSD卡为内存硬盘,主板周围有4个USB接口、一个以太网接口和丰富的外部I/O口,本系统将其作为蒜种鳞芽方向识别与鳞芽扶正的主控模块。
3.2 软件设计
3.2.1 系统工作流程
系统上电开机后进行初始化,输入程序运行指令开始运行。系统主要工作流程图如图6所示。
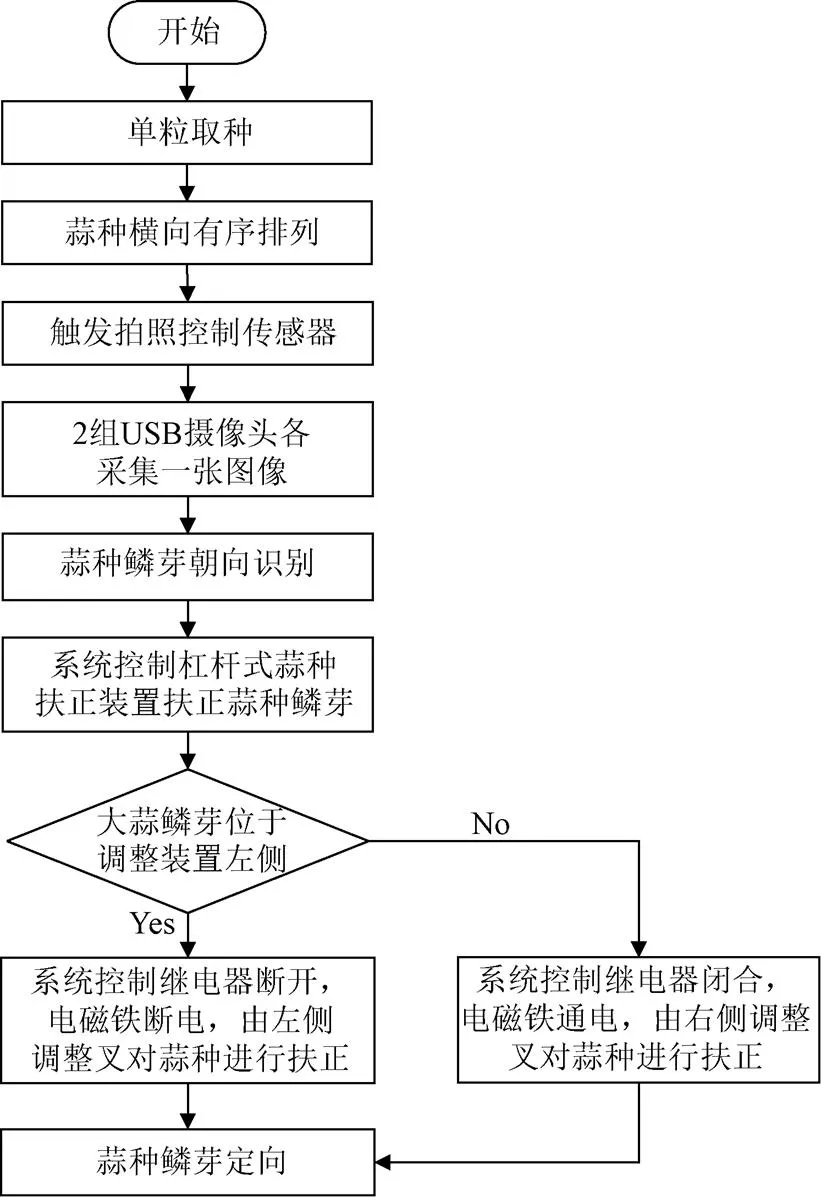
图6 大蒜排种及正芽试验台工作流程图
3.2.2 识别方法
蒜种头尾在特征上有一定的差异,利用其纹理特征[30-31]识别蒜种鳞芽方向是一个有效的选择。试验随机挑选了50粒杂交大蒜蒜种进行特征分析,利用USB摄像头对每粒蒜种头尾各拍摄一张图像,拍摄背景为白色,采用LED补光灯补光。获取的图片格式为JPEG,分辨率为640×480像素,将图像转化为灰度图,并通过计算得到蒜种头尾图像的能量、熵、惯性矩等统计特征值。通过比较蒜种头尾图像的能量、熵、惯性矩(如图7所示)可知,每粒蒜种的头部能量均大于尾部能量,头部熵均小于尾部熵,头部惯性矩均小于蒜种尾部惯性矩,蒜种头尾纹理特征有明显差异。蒜种头尾图像二值化处理后,可以通过比较同一阈值下二值图像的黑色区域面积(黑色像素点数目)来识别蒜种鳞芽方向,黑色像素点多的图像为蒜种尾部图像,黑色像素点少的为蒜种头部图像。由图8可知,识别阈值取75~200时,蒜种尾部的黑色像素点数目均大于蒜种头部的黑色像素点数目,识别阈值为175时,蒜种头尾像素点数目差别最大。图9为选取不同阈值时,蒜种头尾图像的识别效果图,当阈值小于175时,随着阈值的增加蒜种头尾像素点数目差值增加,当阈值高于175时,随着阈值的增加蒜种头尾像素点数目差值减小。

图7 蒜种头尾特征对照曲线

图8 不同阈值时蒜种头尾图像的黑色像素点数目

图9 不同阈值时蒜种头尾阈值效果图
4 试验结果与分析
4.1 试验条件与方法
为了测试鳞芽扶正准确率及对影响扶正率因素进行优化分析,进行了蒜种鳞芽扶正试验设计。试验设备为大蒜排种及正芽试验台,试验选取杂交大蒜为试验蒜种。实际播种需求及大蒜种植农艺研究表明,大蒜种植中,蒜种鳞芽倾斜角小于30°视为朝上,即可达到满意的种植效果[8,32]。
由于蒜种经扶正装置扶正后还要由插播鸭嘴进行播种作业,插播鸭嘴结构对蒜种直立度有一定的修正作用。在扶正试验时,用插播鸭嘴承接扶正后的蒜种,落入插播鸭嘴中的大蒜鳞芽朝上即为扶正合格。每组试验选用120粒蒜种进行测试,以蒜种扶正率作为试验指标,蒜种扶正率的计算公式为

式中为蒜种扶正率,%;为鳞芽朝上的蒜种数量;0为试验蒜种总数。
4.2 单因素试验
在前期试验的基础上,对影响蒜种识别较大的因素电动机转速、通道宽度、拍摄距离、识别阈值进行考察。分别设计以下单因素试验,每组试验选用120粒蒜种进行测试,考察各因素对蒜种鳞芽扶正率的影响。
由图10可知,当转速低于30 r/min,电动机转速对蒜种扶正率影响不明显,当转速高于30 r/min时,蒜种扶正率下降;随着通道宽度、拍摄距离、识别阈值的增加,蒜种扶正率均呈先升高后降低的趋势变化。为寻找最优组合,选取电动机转速为10、20、30 r/min,通道宽度为38、41、44 mm,拍摄距离为5、10、15 mm,识别阈值为155、175、195进行正交试验。
4.3 正交试验优化
4.3.1 试验结果
依据 Box-Behnken 试验原理设计试验方案[33-34],每组试验选用120粒蒜种进行测试,试验方案及结果如表1所示。

注:电动机转速单因素试验时,固定因素条件为:通道宽度为38 mm,拍摄距离10 mm,识别阈值为175;通道宽度单因素试验时,固定因素条件为:电动机转速为10 r·min-1,拍摄距离10 mm,识别阈值为175;拍摄距离单因素试验时,固定因素条件为:电动机转速为10 r·min-1,通道宽度为38 mm,识别阈值为175;识别阈值单因素试验时,固定因素条件为:电动机转速为10 r·min-1,通道宽度为38 mm,拍摄距离10 mm。

表1 试验方案与结果
注:括号中1、2、3、4为1、2、3、4实际值,单位分别为r·min-1、mmmm,无量纲。
Note: The actual values of1,2,3,4are shown in brackets. The units of1,2,3,4are r·min-1, mm and mm, and dimensionless.
4.3.2 回归模型的建立与方差分析
运用 Design-Expert 10 数据处理软件对试验数据进行多元回归拟合,得到各因素与蒜种扶正率的回归方程

回归方程的方差分析结果见表2。蒜种扶正率的值小于0.01,表明回归模型高度显著。失拟项值大于0.05,说明无失拟因素存在,表明回归方程拟合度高。各因素对蒜种扶正率影响的显著性顺序从大到小依次为通道宽度、电动机转速、拍摄距离、识别阈值。模型决定系数2值为0.9038,表明该模型可以拟合90%以上的试验结果,可以用来进行试验预测。

表2 回归模型方差分析
注:*表示影响显著,<0.05;**表示影响极显著,<0.01。
Note: * Means the influence is significant,<0.05; ** means the influence is highly significant,<0.01.
4.3.3 因素影响效应分析
依据建立的扶正率回归模型,将其中 2 个试验因素置于零水平,考虑其他2因素对试验指标的影响,绘制响应面图,如图11所示。
如图11a所示为拍摄距离、识别阈值处于中心水平时,电动机转速与通道宽度对蒜种扶正率的响应曲面图。通道宽度一定时,随着电动机转速的增加,蒜种扶正率先增大后减小。电动机转速一定时,随着通道宽度的增加,蒜种扶正率减小。在电动机转速为15~25 r/min,通道宽度为38 mm时,扶正率较高。如图11b所示为通道宽度、识别阈值处于中心水平时,电动机转速与拍摄距离对蒜种扶正率的响应曲面图。由图可知,拍摄距离与电动机转速的交互作用不显著。如图11c所示为通道宽度、拍摄距离处于中心水平时,电动机转速与识别阈值对蒜种扶正率的响应曲面图。识别阈值一定时,随着电动机转速的增加,蒜种扶正率先增大后减小。电动机转速一定时,随着识别阈值的增加,蒜种扶正率先增大后减小。在电动机转速为15~20 r/min,识别阈值为165~185时,扶正率较高。如图11d所示为电动机转速、识别阈值处于中心水平时,通道宽度与拍摄距离对蒜种扶正率的响应曲面图。拍摄距离一定时,随着通道宽度的增加,蒜种扶正率减小。通道宽度一定时,随着拍摄距离的增加,蒜种扶正率先增大后减小。在通道宽度为38 mm,拍摄距离为7~13 mm时,扶正率较高。如图11e所示为电动机转速、拍摄距离处于中心水平时,通道宽度与识别阈值对蒜种扶正率的响应曲面图。识别阈值一定时,随着通道宽度的增加,蒜种扶正率减小。通道宽度一定时,随着识别阈值的增加,蒜种扶正率先增大后减小。在通道宽度为38 mm,识别阈值为175~185时,扶正率较高。如图11f所示为电动机转速、通道宽度处于中心水平时,拍摄距离与识别阈值对蒜种扶正率的响应曲面图。识别阈值一定时,随着拍摄距离的增加,蒜种扶正率先增大后减小。拍摄距离一定时,随着识别阈值的增加,蒜种扶正率先增大后减小。在拍摄距离为7~13 mm,识别阈值为175~185时,扶正率较高。

图11 交互因素对蒜种扶正率影响的响应曲面
4.3.4 参数优化
为了使试验台达到最佳工作性能,需要对试验中的影响因素进行优化。其目标函数与约束条件为

利用Design-Expert 数据分析软件对参数进行最优化求解,优化后得到影响杂交蒜种扶正率因素的最佳参数组合为:电动机转速为18.34 r/min、通道宽度为38 mm、拍摄距离为8.64 mm、识别阈值为178.36,此时蒜种扶正率为91.67%。
4.3.5 验证试验
为验证优化结果的准确性,对优化参数进行适当取整,设置电动机转速为18 r/min、通道宽度为38 mm、拍摄距离为8.6 mm、识别阈值为178,进行3次重复试验取平均值,每组试验选用120粒蒜种进行测试,试验验证结果如表3所示,蒜种平均扶正率为90.56%,实测值与预测值的相对误差为1.11%,小于5% ,实测值与预测值较为吻合,说明回归模型可靠,每粒蒜种的平均识别时间为0.29 s。
蒜种扶正失败的主要原因是蒜种鳞芽错误识别。造成鳞芽错误识别的主要因素有:1)蒜种运动及振动造成通道中的识别环境复杂,影响图像的清晰度;2)大蒜个体间外形及鳞芽特征差异较大,影响鳞芽的识别准确率。

表3 优化值与试验验证值
5 结 论
1)设计了一种基于双侧图像识别的大蒜排种及正芽试验台,采用双侧图像识别技术,根据蒜种不同的头尾特征,识别蒜种鳞芽并控制杠杆式蒜种扶正机构对其进行扶正,实现大蒜单粒取种及鳞芽扶正功能。解决了难以采用纯机械机构对杂交大蒜鳞芽扶正的问题。
2)通过单因素试验和正交试验对影响蒜种扶正率的因素(电动机转速、通道宽度、拍摄距离、识别阈值)进行了研究,采用Box-Behnken试验设计方法建立了以杂交大蒜扶正率为响应指标的二次回归模型,模型决定系数2值为0.903 8。对所建立的回归模型进行优化,最优工作参数组合为:电动机转速为18.34 r/min、通道宽度为38 mm、拍摄距离为8.64 mm、识别阈值为178.36,此时扶正率为91.67%。对该最优参数组合进行取整并进行试验,结果为90.56%,实测值与预测值的相对误差为1.11%,与预测值较为吻合,平均每粒蒜种识别时间为0.29 s,满足大蒜机械化播种要求。
[1]栗晓宇,耿爱军,侯加林,等. 大蒜播种机研究现状及展望[J]. 农业机械,2017(2):105-107,109.
[2]Lee S Y, Park H J, Kweon G Y. Basic study on a garlic (L.) upright planter[J]. Korean Journal of Agricultural Science, 2019, 46(2): 341-350.
[3]Kim D, Yang S H. Parameter analysis of vacuum suction hole in developing garlic vacuum planter[C]//Proceedings of the Korean Society for Agricultural Machinery Conference. Korean Society for Agricultural Machinery, 2017: 92.
[4]Calderon R E. Aportaciones a La Mecanización de la Siembra del ajo. Diseño de una Sembradora Neumática de Precisión[D]. Valencia: Universitat Politècnica de València, 2016.
[5]Saldaña-Robles N, Serwatowski Hlawinska R J, Aguilera Hernández R A, et al. Localización del ápice del ajo mediante técnicas de análisis digital de imagen[J]. Agrociencia, 2016, 50(2): 215-225.
[6]侯加林,黄圣海,牛子孺,等. 双鸭嘴式大蒜正头装置调头机理分析与试验[J]. 农业机械学报,2018,49(11):87-96.
Hou Jialin, Huang Shenghai, Niu Ziru, et al. Mechanism analysis and test of adjusting garlics upwards using two duckbill devices[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 87-96. (in Chinese with English abstract)
[7]栗晓宇,耿爱军,侯加林,等. 全自动蒜种盒提取投放装置设计与试验[J]. 农业工程学报,2017,33(23):32-37.
Li Xiaoyu, Geng Aijun, Hou Jialin, et al. Design and experiment of full-automatic lifting and releasing device of garlic seed box[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 32-37. (in Chinese with English abstract)
[8]耿爱军,栗晓宇,侯加林,等. 自动定向大蒜播种机的设计与试验[J]. 农业工程学报,2018,34(11):17-25.
Geng Aijun, Li Xiaoyu, Hou Jialin, et al. Design and experiment of automatic directing garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 17-25. (in Chinese with English abstract)
[9]文恩杨,吴彦强,李天华,等. 牵引式大蒜播种机的设计[J]. 农机化研究,2020,42(1):96-100.
Wen Enyang, Wu Yanqiang, Li Tianhua, et al. Design of traction garlic sowing machine[J]. Journal of Agricultural Mechanization Research, 2020, 42(1): 96-100. (in Chinese with English abstract)
[10]谢学虎,张永,刘召,等. 大蒜播种机种植机构的设计[J].农业工程学报,2015,31(1):34-39.
Xie Xuehu, Zhang Yong, Liu Zhao, et al. Design of planting mechanism for garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineerng (Transactions of the CSAE), 2015, 31(1): 34-39. (in Chinese with English abstract)
[11]耿爱军,张兆磊,宋占华,等. 蒜种盒机械投放过程运动学分析与参数优化试验[J]. 农业工程学报,2016,32(5):29-35.
Geng Aijun, Zhang Zhaolei, Song Zhanhua, et al. Kinematic analysis and parameter optimized experiment of garlic box putting process[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(5): 29-35. (in Chinese with English abstract)
[12]李立新,李小忠,钱志兵. 大蒜播种机械现状与发展方向[J]. 现代农业科技,2012(21):220-221.
Li Lixin, Li Xiaozhong, Qian Zhibing. Present situation and development direction of garlic sowing machinery[J]. Modern Agricultural Sciences and Technology, 2012(21): 220-221. (in Chinese with English abstract)
[13]郭小清,范涛杰,舒欣. 基于改进Multi-Scale AlexNet的番茄叶部病害图像识别[J]. 农业工程学报,2019,35(13):162-169.
Guo Xiaoqing, Fan Taojie, Shu Xin. Tomato leaf diseases recognition based on improved Multi-Scale AlexNet[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(13): 162-169. (in Chinese with English abstract)
[14]李玉华,李天华,牛子孺,等. 基于色饱和度三维几何特征的马铃薯芽眼识别[J]. 农业工程学报,2018,34(24):158-164.
Li Yuhua, Li Tianhua, Niu Ziru, et al. Potato bud eyes recognition based on three-dimensional geometric features of color saturation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(24): 158-164. (in Chinese with English abstract)
[15]邓向武,齐龙,马旭,等. 基于多特征融合和深度置信网络的稻田苗期杂草识别[J]. 农业工程学报,2018,34(14):165-172.
Deng Xiangwu, Qi Long, Ma Xu, et al. Recognition of weeds at seedling stage in paddy fields using multi-featurefusion and deep belief networks[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 165-172. (in Chinese with English abstract)
[16]王丹丹,何东健. 基于R-FCN深度卷积神经网络的机器人疏果前苹果目标的识别[J]. 农业工程学报,2019,35(3):156-163.
Wang Dandan, He Dongjian. Recognition of apple targets before fruits thinning by robot based on R-FCN deep convolution neural network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 156-163. (in Chinese with English abstract)
[17]张丽芬. 大蒜种植机械蒜瓣方向识别与系统设计—基于PLC控制技术[J]. 农机化研究,2017,39(8):228-230.
Zhang Lifen. Planting garlic cloves machine PLC control technology and system design—based on the direction identification[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 228-230. (in Chinese with English abstract)
[18]席东河,陆剑,刘志刚,等. 大蒜种植机械蒜瓣方向识别算法与控制系统设计[J]. 农机化研究,2015,37(5):82-85.
Xi Donghe, Lu Jian, Liu Zhigang, et al. Algorithm and control system design on garlic direction identification of garlic planting machine[J]. Journal of Agricultural Mechanization Research, 2015, 37(5): 82-85. (in Chinese with English abstract)
[19]宋伟,赵丽清. 基于机器视觉的蒜头最大横切面直径分级方法[J]. 农机化研究,2015,37(7):203-205,212.
Song Wei, Zhao Liqing. Grading method of garlic by maximum cross-sectional diameter based on machine vision[J]. Journal of Agricultural Mechanization Research, 2015, 37(7): 203-205, 212. (in Chinese with English abstract)
[20]曹世佳. 基于图像识别的种植机器人的研究与应用[D]. 石家庄:河北科技大学,2019.
Cao Shijia. Research and Application of Planting Robot Based on Image Recognition[D]. Shijiazhuang: Hebei University of Science & Technology, 2019. (in Chinese with English abstract)
[21]赵丽清,马志勇. 大蒜播种机装盘系统蒜瓣定向识别算法的研究[J]. 农机化研究,2013,35(6):163-166.
Zhao Liqing, Ma Zhiyong. The study of garlic machine installation system of the directional recognition algorithm[J]. Journal of Agricultural Mechanization Research, 2013, 35(6): 163-166. (in Chinese with English abstract)
[22]郭英芳. 大蒜种植机械中蒜瓣方向识别方法的研究[D]. 杨凌:西北农林科技大学,2011.
Guo Yingfang. Research of the Recognition Method of Garlic Direction in Planting Machinery[D]. Yangling: Northwest A&F University, 2011. (in Chinese with English abstract)
[23]杨清明,李娟玲,何瑞银. 基于图像处理的大蒜蒜瓣朝向识别[J]. 浙江农业学报,2010,22(1):119-123.
Yang Qingming, Li Juanling, He Ruiyin. Direction identification of garlic seeds based on image processing[J]. Acta Agriculturae Zhejiangensis, 2010, 22(1): 119-123. (in Chinese with English abstract)
[24]方春,孙福振,任崇广. 基于深度学习的大蒜鳞芽朝向识别研究[J]. 计算机应用研究,2019,36(2):598-600,610.
Fang Chun, Sun Fuzhen, Ren Chongguang. Identifying bulbil direction of garlic based on deep learning[J]. Application Research of Computers, 2019, 36(2): 598-600, 610. (in Chinese with English abstract)
[25]谢忠红,徐焕良,黄秋桂,等. 基于高光谱图像和深度学习的菠菜新鲜度检测[J]. 农业工程学报,2019,35(13):277-284.
Xie Zhonghong, Xu Huanliang, Huang Qiugui, et al. Spinach freshness detection based on hyperspectral image and deep learning method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(13): 277-284. (in Chinese with English abstract)
[26]孙钰,周焱,袁明帅,等. 基于深度学习的森林虫害无人机实时监测方法[J]. 农业工程学报,2018,34(21):74-81.
Sun Yu, Zhou Yan, Yuan Mingshuai, et al. UAV real-time monitoring for forest pest based on deep learning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 74-81. (in Chinese with English abstract)
[27]郭英芳,王志华. 基于图像处理的大蒜瓣尖识别方法[J].陕西农业科学,2015,61(8):54-57.
[28]吴献,胡伟. 基于观测窗的大蒜鳞芽朝向识别研究[J]. 测控技术,2016,35(7):35-39.
Wu Xian, Hu Wei. Research on garlic clove orientation recognition based on observation window[J]. Measurement & Control Technology, 2016, 35(7): 35-39. (in Chinese with English abstract)
[29]钱建平,李明,杨信廷,等. 基于双侧图像识别的单株苹果树产量估测模型[J]. 农业工程学报,2013,29(11):132-138.
Qian Jianping, Li Ming, Yang Xinting, et al. Yield estimation model of single tree of Fuji apples based on bilateral image identification[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(11): 132-138. (in Chinese with English abstract)
[30]刘舒,姜琦刚,邵永社,等. 应用灰度共生矩阵的纹理特征描述的研究[J]. 科学技术与工程,2012,12(33):8909-8914.
Liu Shu, Jiang Qigang, Shao Yongshe, et al. Investigation of the textual description based on gray level co-occurrence matrix measurements[J]. Science Technology and Engineering, 2012, 12(33): 8909-8914. (in Chinese with English abstract)
[31]Hum C Y, Lai K W, Tan T S, et al. Gray-level co-occurrence matrix bone fracture detection[J]. American Journal of Applied Sciences, 2011, 8(1): 26-32.
[32]刘静. 不同大蒜品种及鳞芽播种朝向对生长特性与品质的影响[D]. 泰安:山东农业大学,2018.
Liu Jing. Effects of Different Garlic Varieties and Bulbil Seeding Directions on Growth Characteristic and Quality[D]. Taian: Shandong Agricultural University, 2018. (in Chinese with English abstract)
[33]葛宜元. 试验设计方法与 Design-Expert 软件应用[M]. 哈尔滨:哈尔滨工业大学出版社,2015.
[34]潘丽军,陈锦权. 试验设计与数据处理[M]. 南京:东南大学出版社,2008.
Design and experiment of test bench for garlic bulbil adjustment and seeding based on bilateral image identification
Hou Jialin, Tian Lin, Li Tianhua, Niu Ziru, Li Yuhua※
(1.2710182.271018)
Garlic is one of the most important cash crops in China. Single grain sowing in garlic planting needs to follow the agronomic requirements of the upward bulbil and downward root. Since foreign garlic planters cannot be used for hybrid garlic sowing in our case, it becomes necessary for domestic garlic planters to adjust the direction of various garlic bulbils using mechanical devices. These garlic planters have a good effect on the sowing of Cangshan garlic, but not good on that of the hybrid garlic. The reason is that the irregular shape of the hybrid garlic cannot meet the condition of the center of gravity locating at the lower half of the garlic clove. In this case of the irregular garlic, the mechanical directing device also fail to adjust the direction of the garlic bulbil. Here a test bench for the garlic seeding was designed to solve the sowing of the hybrid garlic. The test bench of garlic sowing is mainly composed of a seed taking device, a garlic sorting device, an image acquiring machine, a detecting system of garlic bulbil direction, a device of garlic seed directing, and a box for the garlic seeds. The motor with adjustable speeds can serve as the power source for the test bench of the garlic seeding. The following procedure will be performed on this test bench. The power of the motor via the chain drive can first be input to the single-grain taking device with large/small scoops, which can take the single-grained garlic out from the storing box. A large scoop can take one or more garlic seeds in one time, where the single-grain spoon can be turned 90º counter clockwise to transfer the garlic into the small volume of the spoon. Since the small spoon can hold only one garlic, the rest of garlics fall back into the seed box. The device of the single-grain picking transports the garlic and flips the spoon at the top of the garlic channel. Due to the movement of the garlic baffle and various gravity-center of garlics, the garlic seeds that fell into the garlic channel can be arranged horizontally to move linearly with the downward baffle. When the garlic reached to the location of the image collection, the photoelectric sensor can be triggered to control each of the USB cameras on the both sides of the garlic channel to take an image. Based on the collected image showing the bulbil/root of the garlic, the detecting device can identify the direction of the garlic bulbil, whereas the directing device of garlic seed can adjust timely the direction of the garlic. In the course of the garlic seeding, it is necessary to optimize the operating parameters of the test bench. Therefore, the test factors can be selected as the motor speed, the width of the garlic channel, the shooting distance, and the recognition threshold, while the test index as the directing rate of garlic seed. The performance test for the test bench of garlic seeding was carried out by using Box-Behnken analytical method to obtain the influence of the seed directing rate on the sowing of hybrid garlic. The primary and secondary factors in order were the width of the garlic channel, the motor speed, the shooting distance and the recognition threshold. These parameters can then be optimized in the data-processing software Design Expert 10. The optimum parameters can be achieved as the index of the seed directing rate: the motor speed was 18.34 r/min, the width of the garlic channel was 38 mm, the shooting distance was 8.64 mm, and the recognition threshold was 178.36. The seed directing rate was reached 91.67% predicted by the model. Under the condition of modified optimum working parameters, the garlic seed directing rate in the physical test can reached 90.56%, showing that the experimental results were consistent with the optimized simulation. The average identification time of a garlic was 0.29 s, which can meet the requirements of the sowing speed of the garlic planter. These findings can provide insightful application for the vertical planting technology of hybrid garlics.
agricultural machinery; models; garlic planter; design; experiments; bulbil identification; garlic seed adjustment
侯加林,田林,李天华,牛子孺,李玉华. 基于双侧图像识别的大蒜正芽及排种试验台设计与试验[J]. 农业工程学报,2020,36(1):50-58.doi:10.11975/j.issn.1002-6819.2020.01.006 http://www.tcsae.org
Hou Jialin, Tian Lin, Li Tianhua, Niu Ziru, Li Yuhua. Design and experiment of test bench for garlic bulbil adjustment and seeding based on bilateral image identification[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 50-58. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.01.006 http://www.tcsae.org
2019-08-24
2019-12-24
国家特色蔬菜产业技术体系项目(CARS-24-D-01);山东省农机装备研发创新计划项目(2017YF001);山东省农业重大应用技术创新项目(SD2019NJ004)
侯加林,教授,博士生导师,主要从事智能农业装备研究。Email:jlhou@sdau.edu.cn
李玉华,讲师,博士生,主要从事智能农业装备研究。Email:liyuhua@sdau.edu.cn
10.11975/j.issn.1002-6819.2020.01.006
S223.2
A
1002-6819(2020)-01-0050-09
