高速磁浮列车供电分区及定子段设计方法研究
2020-03-02魏远乐郝文瑾刘建强
魏远乐 郝文瑾 刘建强
(1.中土集团福州勘察设计研究院有限公司 福建福州 350013;2.北京交通大学电气工程学院 北京 100044)
1 引言
作为新型轨道交通工具,高速磁悬浮列车采用了磁悬浮技术,运行过程中车辆与轨道无接触运行,避免了轮轨黏着力对速度的限制。相比于传统轮轨列车,速度有极大程度的提升,有效地填补了飞机与高速轮轨列车间的空缺,为乘客提供了更加高效的出行方式。
高速磁悬浮列车一般分为牵引供电系统、悬浮和导向系统、运行控制系统、涡流制动系统等[1]。其中,牵引供电系统与高铁列车相似,包含输入输出变压器、牵引变流器及牵引电机等。但与高铁列车的不同在于,磁浮列车的牵引变流器放置于轨道沿线的变电所中,同时其牵引电机采用长定子直线同步电机,电机定子即为列车的轨道。运行过程中,出于对效率、能耗等方面的考虑,需要对变流器及定子进行分段布置。而牵引变流器的布置及电机定子段的长度直接决定了磁浮列车的牵引特性。但目前对于高速磁浮列车牵引供电系统的研究,主要集中于磁浮列车的牵引及供电控制方面,例如文献[2-4]主要研究了磁浮列车电机的矢量控制及无速度传感器控制;文献[5]主要研究了磁浮列车供电系统的换步控制。上述文献中均采用上海磁浮列车所使用的1 200 m定子段长度,而对实际供电分区及定子段情况没有进行具体分析及理论计算。
针对上述情况,本文对高速磁浮列车结构进行了分析研究,在此基础上,根据磁浮列车的运行特性,提出了一种高速磁浮列车供电分区及定子段设计方法,基于高速磁浮列车的顶层指标,结合列车最小时分运行工况,计算得到磁浮列车供电分区的长度、变流器输出容量、变压器变比、定子段长度等相关设计参数。同时,基于所提出的设计方法,设计开发了高速磁浮列车牵引运行仿真平台,以京沪线的线路数据为例对实际线路进行了牵引供电分区及定子段的划分,验证了所提出的相关设计方法的可行性。
2 高速磁浮列车牵引供电结构
2.1 供电结构
磁悬浮列车运行过程中,其牵引变流器设备放置在轨道沿线的变电站中。对于电机定子段的供电,可以由牵引供电分区的一侧供电,也可以由牵引供电分区的两侧供电[6-8]。图1为列车单供电方式示意图,将线路分成了多个牵引区段。而在每个牵引区段又基于能耗的原因将定子分为图2所示的交错布置的定子段。

图1 供电方式示意

图2 定子段示意
2.2 电机结构
常导高速磁浮列车一般采用扁平型长定子直线同步电机[9-10]。电机的电枢绕组沿轨道排布,定子铁芯采用分段形式构成,每一定子段由0.5 mm硅钢片粘结而成。铁芯上均匀整距分布有开口槽,电枢绕组采用多芯铝导线的集中绕组组成。电机的励磁绕组放置在转子的大槽内,同时转子电磁铁的极靴上开有小槽用来安装发电机绕组。长定子直线同步电机的电枢和励磁磁极的极距值一般相差一个电枢槽距的十分之一,用来削弱齿谐波。
磁浮列车牵引直线电机在运行过程中由地面变电站给电机电枢提供幅值和频率可变的三相交流电,该三相交流电在气隙中生成行波磁场,磁场的速度取决于定子绕组的供电频率[11-12]。车体上的转子绕组由车载蓄电池提供一个直流电从而生成一个恒定的磁场,随车辆进行运动。对于列车的牵引系统而言,气隙中同时存在电枢磁场和励磁磁场,电枢磁场带动励磁磁场进行同步运行的过程中存在一个水平方向的作用力,该作用力将驱动列车克服阻力进行运动。
基于上述分析,可得电机的等效电路及矢量图见图3~图4。

图3 电机等效电路

图4 电机矢量图
3 供电分区及定子段设计思路与方法
3.1 牵引特性曲线
列车供电分区及定子段设计方法主要基于额定的牵引特性曲线开展计算。而牵引特性曲线又与牵引电机额定电压相关。
设计过程中,认为磁浮列车一个悬浮架对应一台牵引电机。其中,磁浮列车单台牵引电机功率为:

以6辆编组为例,结合电机功率计算公式可得列车额定的牵引特性曲线和电制动特性曲线,见图5~图6。
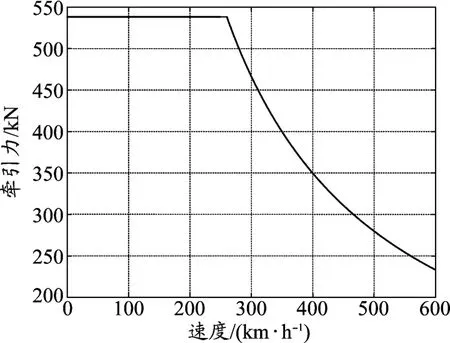
图5 牵引特性曲线
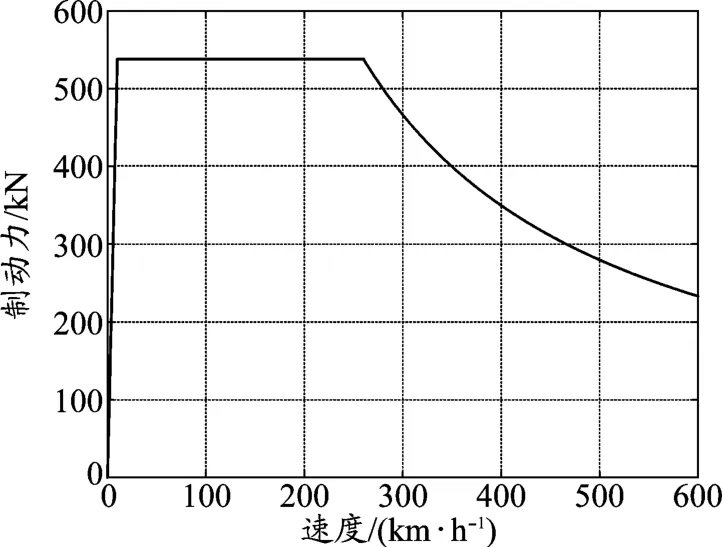
图6 电制动特性曲线
3.2 列车阻力特性
高速磁浮列车运行过程中主要受到以下几种运行阻力的影响:
(1)空气阻力
当列车未受到侧风影响时,其空气阻力为:

式中,v为列车运行速度;Wx为列车运行时的空气阻力系数。
当列车受到侧向风作用时,其空气阻力为:
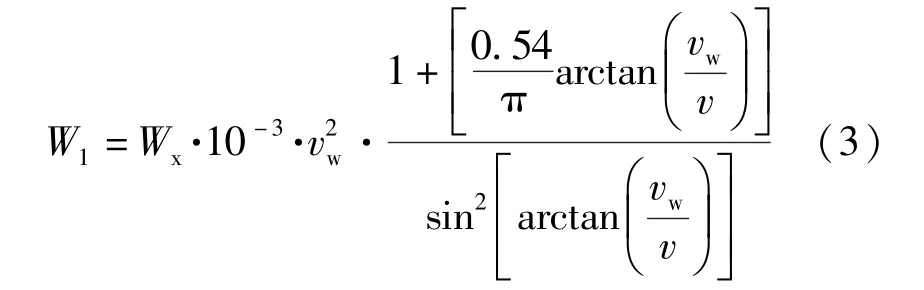
式中,vw为垂直列车运行方向的风速。
(2)直线发电机的运行阻力

式中,ns为列车编组车辆数。
(3)线路两侧导轨上的电磁涡流阻力

因此,高速磁浮列车总的运行阻力为:

3.3 列车运行速度、位置及驱动功率
列车供电分区及定子段设计方法主要基于列车的最小时分运行过程开展计算。列车的最小时分运行过程主要包括牵引工况、匀速工况及制动工况三种。在实际运行过程中,常用单位合力cp,即列车合力C与列车重力之比来表示列车受力情况,则有:

式中,C为列车合力;M为列车的质量;g为重力加速度。
因此,列车运行过程中速度及距离的变化量可表示为:
式中,Δv为列车速度变化量;cp为列车单位合力;Δs为列车行驶距离变化量;Δt为单位时间间隔。
结合列车的运行速度及距离,可得高速磁浮列车在实际运行过程中的驱动功率。
(1)当列车运行在无风、平直道时,列车驱动所需视在功率为:

式中,W为列车运行阻力;as为列车剩余加速度;η为电机入端效率;cosφ为电机功率因数。
(2)当列车运行在有风、平直道时,列车驱动所需视在功率为:

式中,Kv为空气阻力修正系数。
(3)当列车运行在有风、坡度为i的坡道上时,列车驱动所需视在功率为:

式中,i为线路坡道千分度。
3.4 区间线缆参数
由前文列车牵引供电结构分析可知,列车的电机放置在轨道上,而列车牵引变流器设备沿轨道布置,并通过各供电分区的电缆向列车供电。因此,在设计过程中需要考虑区间线缆参数的影响。
其中,区间线缆的电抗为:

区间线缆电阻为:

则可得区间线缆压降为:

式中,I为长定子电流基波有效值。
3.5 供电分区及定子段设计
磁浮列车供电分区的设计主要遵循磁浮列车的行车原则,即每个供电分区内只能有一列列车运行。因此设计过程中,首先基于3.3节计算得到列车全线运行的距离-时间及功率-时间曲线,然后设定列车最小追踪间隔时间,并以该时间为基准对上述两条曲线进行划分。
(1)对于距离-时间曲线,以最小追踪间隔时间划分,可以得到各牵引变流器放置位置的里程标。
(2)对于功率-时间曲线,以最小追踪间隔时间划分,可以得到各牵引区段最大功率值,并将其与列车电机额定功率进行比较,所得比值即为每个供电分区所应采用的变压器变比值。
电机定子段长度的设计则需要综合考虑列车速度、驱动功率、线路条件、电机参数等各方面的要求。因此,在供电分区设计基础上,通过对如图4所示的磁浮列车牵引电机矢量图分析,可得:
式中,Xσ1为电机长定子总漏抗;Xh为直线电机总电抗;Ul为变流器输出电压;UN为电机额定电压;Uk为区间线缆压降;v为列车速度;τ为电机极距;l为定子段长度;ltrain为列车长度;P为对应供电分区最大功率值;φ为电机功率因数角。
由式(16)可得定子段长度为:
综上所述,磁浮列车供电分区及定子段设计方法主要分为以下几个步骤:
步骤一:配置列车的顶层指标,包括列车车重,电机电压、电流、效率、功率因数,列车剩余加速度等相关参数;
步骤二:基于3.3节计算公式计算得到列车全线的运行速度、距离及运行功率,获得列车的v-t曲线、s-t曲线及P-t曲线;
步骤三:遵循一个供电分区只有一列列车运行的行车原则对列车全线距离及功率进行划分,得到各供电分区的划分长度、功率值及变压器变比;
步骤四:结合步骤三中计算得到的各供电分区长度及功率值,利用式(17)完成各供电分区定子段长度设计。
具体的设计方法流程见图7。
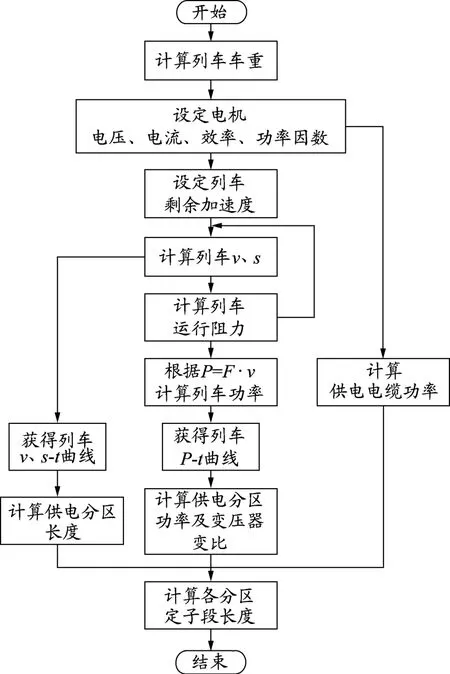
图7 设计方法流程
4 实例分析
为了进一步分析验证所提出的磁浮列车牵引供电分区及定子段设计方法的可行性,基于上述计算方法设计了磁浮列车的软件计算平台。该计算平台基于Matlab/GUI功能进行设计开发,通过配置实际的磁浮列车线路条件完成对供电分区和定子段的设计。
验证过程中,以京沪线路的实际线路条件为例进行分析研究。京沪线路全程距离1 311.5 km,采用最小时分运行方式。运行过程中采用的列车顶层指标及牵引电机参数见表1,列车的剩余加速度配置见表2。

表1 设计参数

表2 剩余加速度
基于上述设计参数及所配置的列车剩余加速度,利用计算平台得到实际线路条件下的供电分区设计情况见图8。可以看出,在所设定的京沪线路中,高速磁浮列车共可以分为16个牵引供电分区,每个供电分区根据实际线路运行条件的不同采用不同的变流器容量及变压器变比。
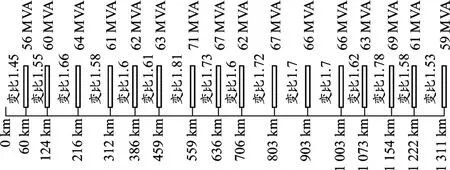
图8 供电分区设计
在不同的供电分区中,由于其变流器容量不同,且列车的速度、驱动功率等均不相同,因此需要单独考虑每个供电分区的实际情况来设计电机定子段长度。以第1供电分区和第5供电分区为例,所展示的定子段见图9。可以看出,第1供电分区采用1 356 m的定子段长度,第5供电分区采用1 283 m的定子段长度。与目前高速磁浮列车常采用的1 200 m定子段长度近似。同时,由于磁浮列车特殊的换步需求,因此使得其左右两侧的轨道定子段采用交错布置。

图9 定子段设计
5 结论
高速磁浮列车采用长定子直线同步电机进行牵引运行,实际过程中,需要对变流器设备的安装位置及牵引电机定子段的长度进行设计以满足磁浮列车实际的运行需求。本文通过分析高速磁浮列车供电系统及牵引电机的结构,建立了电机的等效电路图及电机矢量图。在此基础上,根据列车的牵引、电制动特性曲线及列车的阻力特性,并结合磁浮列车最小时分运行特点,提出了一种高速磁浮列车供电分区及定子段设计方法,通过配置列车顶层指标,计算列车全线速度、距离、驱动功率,从而依据行车原则及电机特性完成对列车供电分区及定子段的划分。基于此方法设计开发了高速磁浮列车牵引运行仿真平台,并以京沪线的线路条件为例进行了供电分区及定子段的设计,验证了设计方法的可行性,为后续高速磁浮列车的设计及应用提供理论帮助。