基于多标记像素匹配的高分辨率遥感图像道路提取
2020-02-28赵泉华
杨 蕴,李 玉,赵泉华
(辽宁工程技术大学测绘与地理科学学院遥感科学与应用研究所,辽宁阜新123000)
0 引 言
随着遥感技术的发展,新一代遥感传感器提供非常高的分辨率,可以获得大量具有精细空间结构的光谱数据.为了利用这些数据,准确且有效的信息提取方法在遥感应用中至关重要,而道路提取作为高分辨率遥感图像信息提取的新兴领域,对于交通规划、灾害管理和汽车导航等具有重要意义.但从高分辨率遥感图像中提取道路存在较多困难,因为道路易受光照变化的影响,各路段可能具有不同的颜色,道路标志线等局部特征也增加了提取难度.因此,需要开发新的方法来提取高分辨率遥感图像中的道路.
近十几年来,基于视觉的道路提取一直很活跃,提出了许多方法,可粗略的分为3 类:基于手工、半自动和自动的方法.基于手工法是由专家手工完成,但高分辨率遥感图像的道路手工提取是一项复杂而艰巨任务,逐渐被人们弃用,而具有较大自动化程度的道路提取方法已成为遥感应用的一个研究热点.在已有文献中,自动方法意味着一个完全自动的过程.如杨先武等[1]提出了一种基于频率域的高分辨率遥感影像城市道路提取方法,利用高通滤波器对图像进行锐化增强,突出道路的边缘信息,再对增强后的图像二值化以提取路段.周家香等[2]提出了一种高分辨率遥感影像城区道路网提取方法,首先利用Mean-Shift算法和直方图准则选择阈值进行二值化分割实现道路粗提取,后通过构造多方向形态学滤波对分割结果进行精细化处理.理论上,道路全自动提取方法不需要人为干预,但这是不切实际的,因为高分辨率图像的使用对自动提取道路添加了一些限制因素,如背景覆盖,道路上的车辆及其阴影等复杂因素.
在半自动方法中,人为给予一些先验信息,例如种子点,在道路的正确识别中起着重要作用.如施海亮等[3]提出基于Snakes 模型的高分辨率遥感影像城区道路提取方法,以人为选定的初始种子点开始,利用Snakes模型进行线性特征提取.由于模型的非凸性,它有可能收敛到局部极值点甚至发散,但其最大的缺陷是无法进行拓扑变化,不能适用于类型复杂且形状各异的道路.谭仁龙等[4]针对基于滑动矩形模板匹配提取效果不佳的问题,提出一种基于滑动圆形模板的半自动道路提取方法,取得了较好的结果.但由于滑动圆形模板的形状限制,使其在道路边缘处理不佳;由于模板的单一性,使其难以从具有复杂场景的高分辨率遥感图像中完整地提取不同类型的道路.
为能够对复杂场景中的不同类型道路进行完整提取,提出一种基于多标记像素匹配的高分辨率遥感图像道路提取方法.首先,为了减少光照变化对提取的影响,选取与照明强度弱相关的色相特征作为初始匹配项;然后,以矩形框的方式标记不同类型的道路,利用t检验法剔除其匹配项中由于不同颜色的道路标志线、窨井盖和反光物等引起的异常值,从而确定阈值来匹配道路像素点,利用局部纹理算子对匹配结果进行筛选;最后,利用道路区域的形态特征对匹配结果进行优化处理得到最终提取结果.
1 算法描述
设I=(is:s∈S)为定义在图像域S,大小为M×N的待提取彩色遥感图像,其中,S={s=(m,n):m=1,2,…,M,n=1,2,…,N},M和N分别是I的行数和列数,s为像素索引,(m,n)表示像素格点位置,is为第s个像素的RGB 矢量,is=(isR,isG,isB)T,isR、isG和isB分别是is在RGB空间的三通道值.
1.1 颜色空间转换
为降低照明变化导致I颜色值的可变性,将I由RGB 颜色空间转换到Lab 颜色空间.由于RGB颜色空间不能直接转换为Lab 颜色空间,需将RGB颜色空间先转换到XYZ颜色空间,而常用的转换矩阵有BT2020、BT709 和DCIP3 这3 种类型[5].BT709 矩阵可将RGB 和XYZ 在同等范围映射,故利用BT709矩阵进行转换.对任一像素is存在如下关系

式中:(is)XYZ表示is的XYZ 矢量,和isZ分别是is在XYZ 空间的三通道值.将其由XYZ 颜色空间转换到Lab 颜色空间,关系式为

式中:下标L,a,b 表示Lab 颜色空间的三通道;(is)L表示从黑色到白色的亮度,(is)L∈[0,100] ;(is)a和(is)b为像素s的色相特征,它们提供与照明无关的像素颜色信息;Xn,Yn和Zn是参考白点的刺激值(用于标准化);映射函数f(∙)的表达式为
1.2 多类型道路标记
以绘制矩形框的方式在I中对不同类型的道路进行手动标记,作为匹配模板,记为R={R1,R2,…,Rk,…,RK} ,k为标记框索引,K为手动标记矩形框个数.对任一标记框Rk,k∈{1,2,…,K},利用1.1 节的颜色空间转换公式获取其在Lab颜色空间a 通道和b 通道的不同元素,构成向量Uka=(ak1,ak2,…,akl,…,aKL),Ukb=(bk1,bk2,…,bkl,…,bKL),其中,l为元素索引,akl和bkl分别是第k个标记框在a 通道和b 通道的第l个值,L为不同元素的个数.Rk可能包括不同颜色的其他目标,在Uka和Ukb内表现为异常值,若以这些异常值为模板,对后续的像素标记会造成不可逆的错误.因此,利用t 检验法剔除Uka和Ukb内由噪声引起的异常值.
对Uka=(ak1,ak2,…,akl,…,aKL),假设其第j(j∈{1,2,…,L} )个值akj为可疑异常值,分别计算其不包含akj的均值ak和标准偏差σk,即

当统计量满足关系式

则akj为异常值,Cp(L)为统计量的临界值,可表示为

式中:tp(L-2 )是自由度为(L-2 )的t分布的p分位数[5],遍历Uka的所有值对第k个标记矩形框在a通道中的异常值进行剔除,记为.同理对Ukb=(bk1,bk2,…,bkl,…,bkL)处理得到b 通道中剔除异常值的.
1.3 多标记像素匹配
对第k个道路模板,以和为种子点来匹配各像素点,取其区间值为阈值,即
式中:Tka和Tkb分别是以第k(k∈{1,2,…,K})个标记矩形框构建的道路模板阈值,对任一像素is,将(is)a和(is)b与阈值相比较,若其都在阈值区间,即

式中:⋂表示“且”.若满足式(12),则标记此像素为道路点.遍历所有像素点,从而得到对不同类型道路的粗匹配结果E={e(m,n):m=1,2,…,M,n=1,2,…,N} ,e(m,n)∈{0,255}.e(m,n)=255,标记为道路;e(m,n)=0,标记为非道路.
E中确定的道路像素点利用文献[6]提出的面向局部纹理特征与模板的纹理特征相比较,由皮尔森积矩相关系数为准则对其进行筛选.以LO(R,P)作为像素点的局部纹理描述符,其中,R为像素邻域的半径,P为邻域内的像素数目.对任一待定道路像素点e,其图像位置为(xe,ye),邻域像素p的坐标为(xp,yp),ie和ip是像素e和p的光谱矢量,计算ie和ip之间的绝对差异dp为

式中:ieR、ipR,ieG、ipG和ieB、ipB分别是像素e和p的RGB 空间三通道值.由此可得像素e处的局部纹理描述符 ,同理计算矩形模板Rk中各像素点的差异,然后计算所有沿同一方向的差异的平均值,即

对待选像素点e,计算Le和Lk的皮尔逊积矩相关系数,可表示为

1.4 道路识别
高分辨遥感图像场景具有复杂性,使一些对象在光谱或纹理上与道路极其相似,造成道路粗提取结果E′中存在大小不同的零星伪道路区域,为此利用道路区域大范围连通特点和形态特征对E′进行精细化处理.
利用道路区域大范围连通特点,对E′进行栅格扫描,搜索像素值e′(m,n =)255 且位置相邻的像素点组成连通区域,以像素为单位统计每个区域的面积.如果小于阈值,那么此区域就被删除,大于阈值的被保留,同理删除图像背景中较小连通区域.去除小面积伪道路的提取结果为E1,基于连通域标定的伪道路去除算法流程如图1所示.
对去除小面积伪道路后的提取结果进行精确道路识别,由最小外接矩形窗紧致包络E1中的连通区域,利用矩形窗的几何结构近似表征所包络连通区域的形态特征[7].根据道路条带状的形态学特征,用于识别道路区域的分类准则为

式中:Lr和Wr分别是第r个矩形窗的长和宽;T为最小外接矩形窗长宽比的阈值,本文T >5,大于T的被判定为真实道路,反之为伪道路.由此得到道路最终提取结果Z={z(m,n):m=1,2,…,M,n=1,2,…,N}.
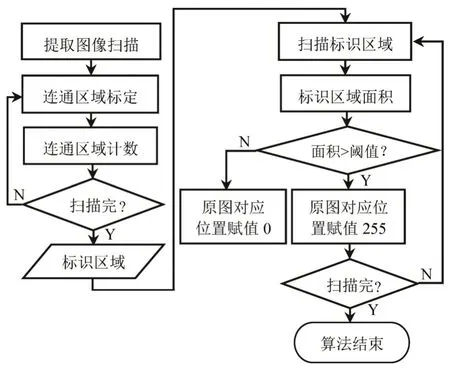
图1 基于连通域标定的伪道路去除算法流程Fig.1 Flow chart of pseudo road removal algorithm based on connected domain calibration
2 实验讨论与分析
本文实验运行环境为Windows 7,32位操作系统,具有4 G 内存,处理器为Intel(R)Core(TM)CPU 32 G 的个人计算机.通过MATLAB R2015b编写程序对包含不同类型道路区域的高分辨率遥感图像进行提取实验.
2.1 实验数据及设置
采用从中景视图网获取的高分辨彩色遥感影像数据对本文方法进行验证.图2为4幅含有不同类型道路的高分辨率遥感图像,其中,图2(a)和(b)是分辨率为0.5 m,尺度分别为981 pixel×954 pixel和400 pixel × 600 pixel 的WordView-2 图像,图2(c)和(d)是分辨率为0.4 m,尺度分别为512 pixel×385pixel和320pixel×353pixel的GeoEye-1图像.
为验证所提方法的优越性,利用全自动方法[2]和滑动圆形模板匹配的方法[4]作为对比算法,对结果从视觉和统计分析角度进行比较.文献[2]的方法说明进行半自动化提取的必要性,文献[4]的方法表明,结合像素光谱和纹理的像素匹配在识别完整度和提取精度方面的优势.
2.2 道路标记
由图2的原始图像可以看出,在同一场景下可含有不同类型的道路,其颜色和纹理不同,这不利于道路的完整提取.为此,将不同类型的道路以绘制矩形框(本文选择15 pixel×15 pixel)的方式对图3(a1)~(d1)进行标记,其中对图3(a1)~(d1)的标记框个数K分别为4、4、3和3,各标记结果的放大图如图3(a2)~(d2)所示.
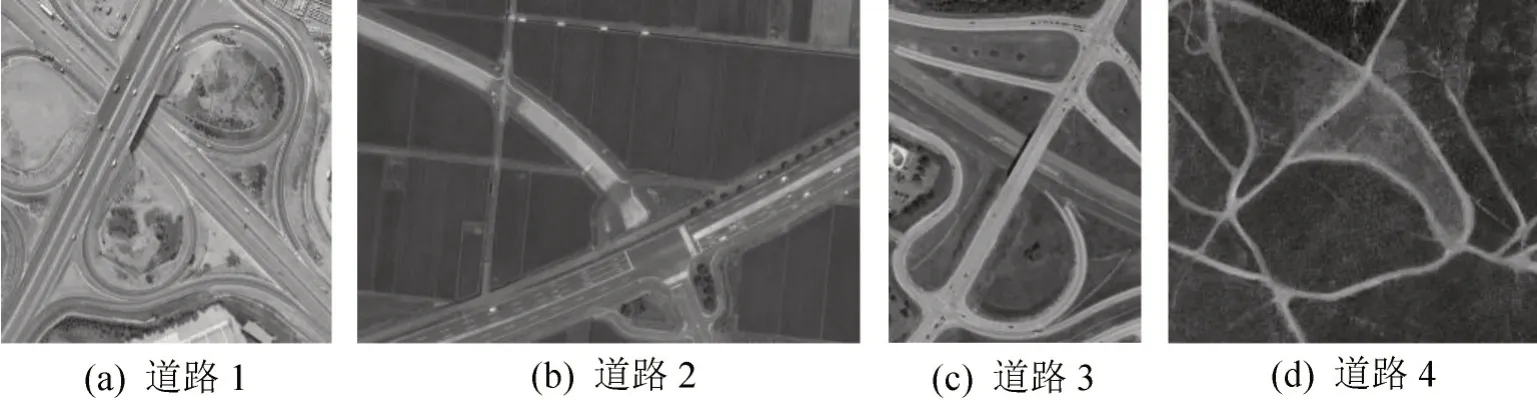
图2 原始图像Fig.2 Original image

图3 道路标记Fig.3 Road marking
2.3 本文方法实验结果及分析
本文方法提取的道路粗结果如图4(a1)~(d1)所示,由于光谱特征的相似,使得粗提取结果中存在零星的伪道路,为此利用道路区域大范围连通特点和其形态特征对粗提取结果进行精细化处理,结果如图4(a2)~(d2)所示.

图4 本文方法提取结果Fig.4 Extraction results of this paper
为了在视觉上对本文方法进行定性评价,将提取的道路结果叠加在原始图像上,结果如图5(a)~(d)所示.
由叠加图可以看出,本文方法提取结果涵盖了图中所有类型的道路,且提取结果边界与实际道路边界几乎完全吻合,说明本文方法在提取道路类型的完备性和提取道路边界定位的准确性.

图5 本文方法定性评价结果Fig.5 Qualitative evaluation results of this paper
对提出方法进行定量评价,采用Modava提出的一种基于邻域像素的评价标准[8],将手工提取道路的边界线用作评价的标准边缘,以其为中心建立半径为5 pixel 的缓冲区,计算所提取的道路边界线落入不同半径缓冲区的累加百分比,其结果如表1所示.由表1可以看出,本文方法得到的边界线与手工边界线在半径为2 pixel 时,精度均达到80%以上,说明本文方法具有较高的准确性.

表1 本文方法在不同缓冲区半径内的提取精度Table1 Extraction accuracy of this method in different buffer radius
2.4 对比算法道路提取结果及分析
对比算法实验结果如图6所示,由图6和图4(a2)~(d2)对比可以看出:文献[2]和[4]的方法在提取具有显著性视觉特征的道路时,具有类似的结果;在提取不具有显著性视觉特征的道路时,正确率和完整性方面文献[2]比文献[4]更低;文献[4]虽在精度上有所提高,但由于模板自身几何特性,使道路边界呈现模板的轮廓形状,特别是在如道路4场景中,道路宽度较小,形态变化较大,造成相邻道路被连通.相比而言,本文以手工标记为模板,在综合考虑色相和纹理特征的基础上,以像素为基元进行匹配,可以很好地实现不同类型道路的提取.
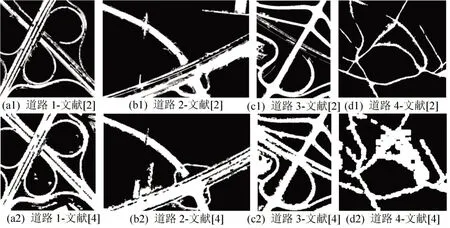
图6 文献[2]和文献[4]提取结果Fig.6 Extraction results of in Ref.[2]and Ref.[4]
将图6提取结果叠加在原始图像上,结果如图7 所示.由图7和图5对比可以看出,与文献[2]和[4] 方法相比,本文方法提取得到的边界线与实际边界线的吻合性更好.因此,验证了所提方法的可行性和有效性.
同样,基于邻域像素的评价标准对对比算法进行定量评价,结果如表2所示.

图7 文献[2]和文献[4]方法定性评价结果Fig.7 Qualitative evaluation results of in Ref.[2]and Ref.[4]

表2 对比算法在不同缓冲区半径内的提取精度Table2 Extraction accuracy of comparison algorithms in different buffer radius
对比表1和表2可以看出:当完全重叠时,文献[2]、文献[4]和本文方法的平均提取精度分别为9.26%、14.06%和26.24%,考虑到标准边界线的偏差,三者的提取精度相差不大;当达到半径为2 pixel 时,文献[2]和[4]平均提取精度分别为50.57%和62.24%,本文方法均已达到80%以上,说明本文方法具有较高的准确性.随着缓冲区的半径增大,本文方法提取精度始终大于文献[2]和[4],且优越性更加显著.
3 结 论
本文针对高分辨率遥感图像的道路提取不完整和误提取问题,提出一种基于多标记像素匹配的高分辨率遥感图像道路提取方法.利用简单地标记多类型道路提供正确的匹配模板,由色相特征的像素匹配可达到道路区域的过提取效果,后经局部纹理特征对匹配像素进行筛选降低了计算复杂度,充分利用道路区域的形态特征对真实道路区域进行划定,为高分辨遥感图像的道路提取问题提供了一个较为可行的解决方案.
