受电弓与接触网系统方案设计方法及其应用
2020-02-26关金发田志军吴积钦
关金发,田志军,吴积钦
(1.中铁第一勘察设计院集团有限公司电气化设计处, 西安 710043; 2.西南交通大学电气工程学院,成都 610031)
高速列车依靠受电弓与接触网滑动接触不间断的传输电能实现动力牵引与再生制动。弓网动态运行可靠性是限制列车高速运行的一个重要因素。而弓网系统方案设计决定了弓网系统的固有可靠性,是接触网设计阶段的必要环节、接触网全寿命周期管理的重要依据。TB 10621—2014《高速铁路设计规范》[1]、GB/T 32578—2016《轨道交通地面装置 电力牵引架空接触网》[2]和TB 10009—2016《铁路电力牵引供电设计规范》[3]中明确提出需利用弓网仿真方法对接触网进行系统设计。而在具体的弓网系统设计中受电弓和接触网的技术参数较多,且需同时满足受电弓、接触网和弓网接口的设计依据,多参数组合的多个弓网系统方案需满足多项设计依据,为提高设计效率和弓网系统固有可靠性,需研究一套合理的弓网系统设计方法或设计流程。
高鸣[4]、朱飞雄[5-6]介绍了国内外高速铁路接触网的设计参数,但并未给出选取依据。李文豪、关金发等利用了弓网动力学仿真技术,比较不同弓网技术参数和外部环境的弓网动态性能指标,得到系统匹配性最优的弓网技术参数[7-13],但仿真前的弓网技术参数输入未给出选取依据;蒋先国[14]、吴积钦[15]论述了弓网系统设计的主要计算方法,并利用弓网动力学仿真得到最终接触网系统方案,但未形成完整的弓网系统设计方法,且未考虑受电弓、外部环境对弓网系统的影响。
基于以上研究,首先根据相关标准,分析弓网动态性能的评价依据,通过理论计算,研究受电弓、接触网内部各技术参数的设计依据,按照一定的设计流程和步骤,筛选满足设计目标与设计依据的接触网初步设计方案;然后利用弓网动力学仿真技术,研究受电弓、接触网和外部环境的三者动态耦合关系,得到初步设计方案弓网动态性能指标;参照性能指标评价依据,比选得到最终技术性和经济性最佳的弓网系统设计方案,为新建铁路线路与中国高铁走出去的弓网系统方案提供一种科学合理的设计方法。
1 弓网系统方案设计方法
1.1 弓网系统方案设计流程
弓网系统方案设计方法由设计目标、设计依据、设计流程、设计步骤、计算方法组成。弓网系统方案设计的流程如图1所示。
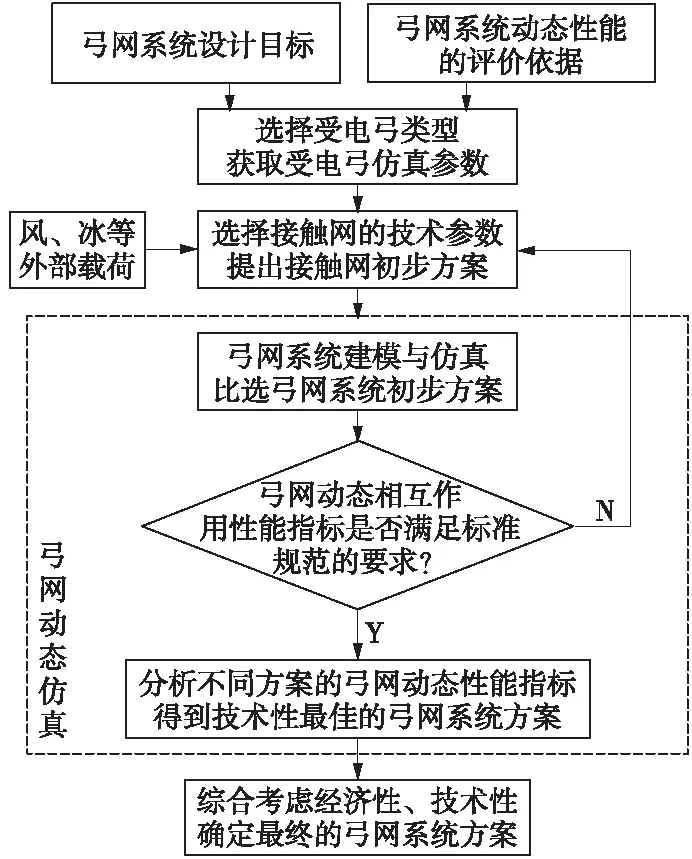
图1 弓网系统方案设计流程
弓网系统设计目标是受电弓运行在最高设计速度及以下与接触网维持良好的动态相互作用。最终被设计出来的弓网系统方案首先是满足弓网系统动态性能指标的评价依据,其次要求接触力标准差尽量小,以实现良好的弓网接触质量。
1.2 弓网动态性能评价依据
弓网系统动态性能指标包括接触力的统计量、定位点抬升统计量、燃弧统计量和离线率。根据TB 10621—2014《高速铁路设计规范》和IEC 62486—2017《Technical criteria for the interaction between pantograph and overhead line (to achieve free access)》[16],弓网系统动态性能指标的评价依据如表1所示。
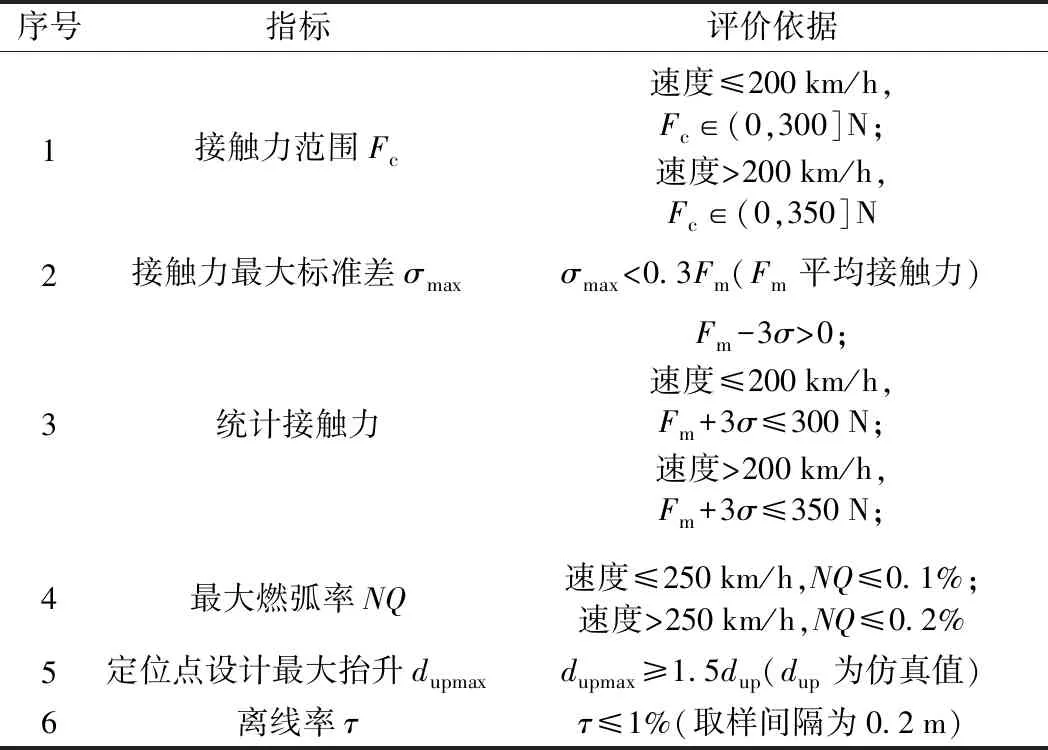
表1 弓网动态性能评价依据
燃弧率可隐含在最小允许动态接触力表1中条件6中,因为一般弓网燃弧的前提是弓网接触力为0,即用离线率τ替代燃弧率。
接着根据设计速度等级,确定高速列车上与速度等级匹配的使用的受电弓类型、数量及技术参数。
在接触网技术参数选择前应确定接触线、承力索线型的最小截面,考虑接触线磨损至80%标称截面下悬挂线索应能满足牵引供电系统额定载流量和短路载流量的要求。
接触网的动态特性取决于设定受电弓条件下的接触网悬挂参数、支持装置的系统设计[1]。在受电弓技术参数确定后,接触网需设计与之匹配的技术方案。
1.3 接触网技术参数设计依据
接触网技术参数的设计步骤及设计依据如表2所示。以下针对几个关键步骤进行重点分析。

表2 接触网技术参数设计步骤及依据
(1) 接触线线型与张力
首先根据载流量选定接触线的截面,参考TB 10621—2014《高速铁路设计规范》中规定接触网最高设计速度不应超过接触线波动传播速度的70%,由式(1)可计算出接触线最小工作张力。标准UIC 799—2002Characteristicsofa.c.overheadcontactsystemsforhigh-speedlinesworkedatspeedsofover200 km/h[17]中规定速度大于300 km/h,多普勒系数需大于0.17,反射系数小于0.4,放大系数小于2.3。通过式(2)验算多普勒系数α是否满足标准要求。

(1)
式中vmax——最高设计速度,m·s-1;
Cp——接触线波动传播速度,m·s-1;
∑z——接触线工作张力之和,N;
∑m——接触线单位长度质量之和,kg·m-1。

(2)
接触线最小工作张力与拉断力的关系
Tw=TBmin×0.479 2
(3)
式中Tw——接触线最小工作张力/N;
TBmin——接触线最小工作张力的拉断力/N。
由TB/T 2805—2017《电气化铁道用铜及铜合金接触线》[18]选择接触线截面和拉断力相对应的接触线材料。
(2)承力索线型与张力
确定了接触线待选的材料和张力后,通过反射系数r可以计算出承力索的最大工作张力。
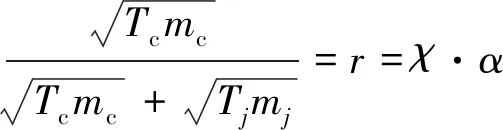
(4)
式中Tc——承力索张力,N;
mc——承力索单位长度自重,kg·m-1;
Tj——接触线张力,N;
mj——接触线单位长度自重,kg·m-1;
χ——放大系数。
承力索最大工作张力与拉断力的关系
Fw=FBmin×0.455 2
(5)
式中Fw——承力索最大工作张力,N;
FBmin——承力索最大工作张力的拉断力,N。
由TB/T 3111—2017《电气化铁道用铜及铜合金绞线》[19]选择承力索截面和拉断力相对应的承力索材料。
(3)跨距及弹性吊索
接触网最大跨距可通过风偏计算得到,直线区段,等拉出值的接触悬挂风偏与跨距关系见式(6),也可采用接触网仿真等其他计算方法计算不同工况的风偏值。

(6)
式中emax——接触悬挂最大风偏,m;
Pc——承力索单位长度风负载,N;
Pj——接触线单位长度风负载,N;
Ptd_span——弹性吊索单位长度风负载,N;
Pd_span——吊弦单位长度风负载,N;
l——跨距,m;
Tj——接触线张力,N;
Tc——承力索张力,N;
a——拉出值,m。
接触线最大风偏应满足弓头允许的工作范围。利用式(6)计算得到最大风偏跨距。根据TB 10621—2014《高速铁路设计规范》和GB/T 32578—2016《轨道交通地面装置 电力牵引架空接触网》,弹性不均匀系数需满足表3中给出的范围。根据弹性不均匀系数的设计依据,可以确定简链跨距和弹链跨距,以及弹性吊索线型、长度与张力,即完成表2中第4,5步。弹性不均匀系数的计算尚未见解析算法,现阶段需利用有限元法,建立相关的接触网仿真模型,进行一跨内弹性值的计算。

表3 接触网弹性不均匀系数设计依据
(4)拉出值与定位结构
拉出值受到定位器的受力限制,是一个中间调整参数,等“之”字值直线区段拉出值计算见式(7)。若定位结构是限位定位,对定位器角度有一定要求,根据定位器角度的正弦值与定位器长度的乘积等于限位定位器的极限抬升量,极限抬升量与1.5相除的值应大于最高速度下受电弓通过定位点的最大抬升量。
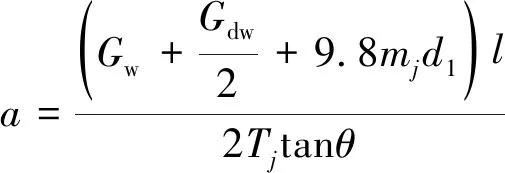
(7)
式中Gw——定位线夹自重,N;
Gdw——定位器自重,N;
d1——定位点距第1吊弦的距离,m;
θ——定位器角度,(°)。
1.4 弓网动力学仿真及方案确定
利用计算机仿真技术,建立初步方案的弓网动力学仿真模型,进行仿真计算,获取不同初步设计方案的弓网动态性能指标,与动态性能指标的评价依据相比较,得到弓网动态性能最佳的初步设计方案。经外部载荷的校验计算,动态性能指标仍能满足标准要求,则输出为技术性最佳的弓网系统方案。若所有初步方案均不能满足标准要求,则重新调整接触网技术参数选取。
在保证弓网系统方案满足标准要求的前提下,考虑放大跨距值、拉出值、锚段长度等数值,综合经济性与技术性确定最终的弓网系统方案。
2 弓网系统方案设计方法应用
应用第1节的弓网系统方案设计方法,设计满足双弓运行速度为380 km/h的弓网系统方案。
首先提出弓网系统的初步设计方案。假设适应380 km/h的受电弓选用SSS400+与CX-GI型,弓间距取最小值200 m。经牵引供电计算得到的承力索与接触线的截面积分别不小于95 mm2和120 mm2。按照弓网系统设计流程及接触网技术参数设计依据,得到4个接触网技术参数的初步设计方案,如表4所示。

表4 接触网技术参数初步设计方案
重点比选中间区段的弓网系统方案,锚段关节和外部载荷在本应用中暂不讨论。
根据弓网系统方案设计方法,进行弓网动力学仿真模型建立并求解,获取不同弓网初步方案的动态性能指标。
为保证弓网动力学仿真结果的准确性,弓网动力学仿真系统应根据EN 50318—2002validationofsimulationofthedynamicinteractionbetweenpantographandoverheadcontactline[20]的确认流程,进行有效的验证。基于已确认的弓网动力学仿真系统[21],进行弓网初步方案的动态仿真。
首先建立SSS400+型和CX-GI型受电弓的仿真模型。SSS400+型、CX-GI型受电弓仿真模型及参数如表5、表6所示。受电弓的总气动力按照0.000 97v2选取,v为受电弓运行速度。

表5 SSS400+型受电弓仿真模型及参数
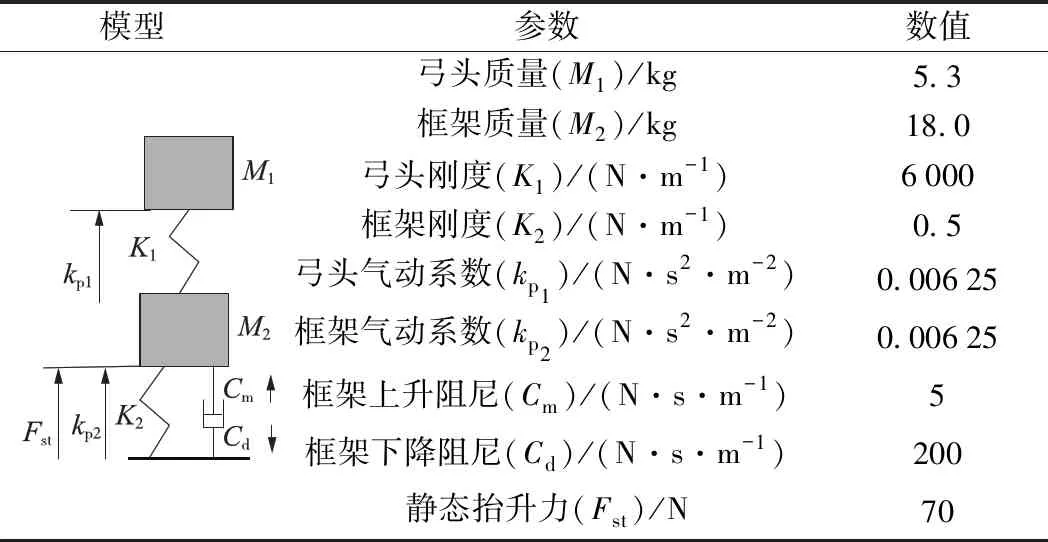
表6 CX-GI型受电弓仿真模型及参数
根据表4参数,建立4种接触网初步方案的接触网仿真模型,简链锚段长度暂取1 360 m,简链弓网动态性能指标统计520~840 m,弹链锚段长度暂取1 400 m,弹链弓网动态性能指标统计500~900 m。其中方案1和方案2的接触网仿真模型如图2、图3所示。
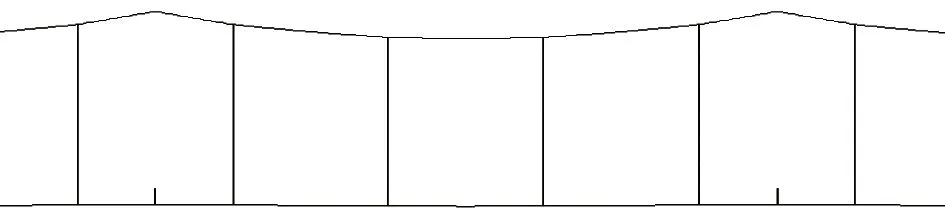
图2 初步方案1接触网仿真模型

图3 初步方案2接触网仿真模型
2种受电弓仿真模型双弓分别通过4种接触网仿真模型,一共8种仿真工况,通过弓网动力学仿真,得到各种工况的弓网动态性能指标。一般双弓运行后弓的接触力波动较大,以下比较后弓接触力波形。其中SSS400+型受电弓后弓通过方案1和方案3的弹性链型悬挂接触网获得的接触力曲线如图4所示,方案3的后弓接触力波动较方案1的大。SSS400+型受电弓后弓通过方案2和方案3的简单链型悬挂接触网获得的接触力曲线如图5所示,方案4的后弓接触力波动较方案1的大。对比图4和图5,弹性链型悬挂接触网的接触力波动相对简单链型悬挂接触网较小。
对比两种受电弓通过方案3同种接触网的接触力曲线,如图6所示。SSS400+型后弓的接触力波动相对CX-GI型后弓较小。

图4 SSS400+后弓通过方案1和方案3的接触力曲线
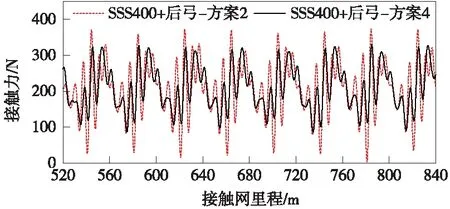
图5 SSS400+后弓通过方案2和方案4的接触力曲线

图6 SSS400+和CX-GI后弓通过方案3的接触力曲线
统计8种弓网动态性能指标如表7、表8所示,同种类型受电弓通过弹性链形悬挂接触网的接触力标准差比简单链型悬挂接触网较小;不同类型受电弓通过同种弹性链型悬挂接触网,CX-GI型受电弓的接触力标准差比SSS400+型受电弓较大。8组弓网系统方案中,有SSS400+型、CX-GI型受电弓通过方案1接触网与SSS400+型受电弓通过方案3接触网的接触力统计指标满足表1所提出的弓网动态性能指标范围。综合以上分析,仅有接触网方案1的技术参数能同时满足两种受电弓双弓运行速度380 km/h的弓网动态性能要求。

表7 SSS400+型受电弓弓网仿真结果

表8 CX-GI型受电弓弓网仿真结果
由方案1的定位点最大抬升量131 mm计算,定位点设计最大抬升量为197 mm,取整为200 mm。定位结构设计需同时满足200 mm的定位点允许最大抬升、拉出值200 mm和定位器长度1.15 m的要求。
3 结论
(1) 根据弓网系统相关标准,利用接触网振动理论和弓网动力学仿真技术,提出弓网系统方案的设计目标、设计依据、设计流程、设计步骤,形成弓网系统方案的通用性设计方法,预测弓网系统的动态性能,提高弓网系统的固有可靠性。
(2) 应用弓网系统方案设计方法,设计满足两种受电弓双弓运行速度为380 km/h的弓网系统建议方案。具体方案为:SSS400+和CX-GI型受电弓,弓间距为200 m;接触网标称跨距为50 m;接触线使用CTCZ120 mm2,张力为27 kN;承力索使用JTM95 mm2,张力为15 kN;弹性吊索使用JTMH35 mm2,长度18 m,张力3.5 kN;吊弦使用JTMH10 mm2,数量为5根;结构高度为1.6 m;定位点设计最大抬升量为200 mm;拉出值为200 mm。
