三峡升船机船厢对接停位及运行分析
2020-02-26郑琴霞鄢玲祉吕小虎
郑琴霞,鄢玲祉,吕小虎,王 贝
(长江三峡通航管理局,湖北 宜昌 443002)
1 运行工艺
三峡升船机于2016年9月开始试通航。船厢有效尺寸120 m×18 m×3.5 m(长×宽×水深),提升质量1.55万t,最大提升高度113 m,能通过3 000 t排水量的船舶。三峡升船机布置在水利枢纽左岸,与双线五级船闸共同组成三峡水利枢纽永久通航设施,上游通航水位145~175 m,下游通航水位62~73.8 m,且水位变率可达0.5 mh。如此幅度的水位变化和变率在国内外都属少见,尤其是下游引航道非恒定流作用十分突出,水位变动常常给船厢对接停位带来很大的影响[1-3]。
升船机运行工艺过程为:在船厢处于与航道对接的状态下船舶进入船厢,船厢解除对接状态,船厢上行(或下行)停至另一端航道水位高度,将船厢与之对接,船舶即可驶出船厢;待下一艘船进厢后再将船厢解除对接状态,如此循环往复。三峡升船机采用自动化的控制方式,由集控站远程操作实现船舶过坝运行[4]。下行过厢过程如图1所示。

图1下行过厢过程
船厢高度与航道水位之间的偏差可以作为准确船厢停位的判断依据。船厢上行或下行时以船厢标准水面(3.5 m水深)为参考,以航道水位为目标位,通过控制船厢高度与航道水位偏差来实现对准确停位的控制。船厢如果停位过高或过低,对航道水位变化的抵抗力降低,对接后略大的水位波动都可能导致船厢失水或者过载。船厢停位与航道水位偏差大小的控制是研究的重点。
2 船厢对接停位
2.1 对接停位装置
采用一种带有伺服系统且具有高精度和灵敏度的浮动标志镜,以及与之匹配使用的一组反射式光电开关来实现对接运行位置校验和减速停位的控制[5]。浮动标志镜安装在上下闸首工作大门,实时跟踪指示航道水位,反射式光电开关B0、B1、B2、B3、B4安装固定在船厢上游或下游与标志镜相对的位置(图2)。
B0、B1、B2、B3、B4用于给驱动单元提供行程检验、正常减速、快速减速、准确停位及紧急停机的检验信号,驱动单元接到信号后迅速采取对应措施达到减速、停位及保护的目的。它们之间的相对位置关系根据驱动单元设定的速度控制过程决定,s1→3、s2→3、s3→4上下游均设置相同,分别为2.0、0.5、0.2 m。因上下游的差异,在s0→1设置上有所不同,上、下游分别为1.5、1.6 m。
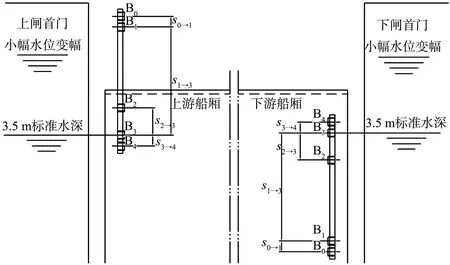
注:sm→n为开关Bm到Bn的距离。
2.2 实时水位自动对位控制
船厢在自动对接运行时,根据航道水位设定目标位置,按照给定速度控制图运行,在船厢即将到达停位点前,船厢上的信号开关B0、B1、B2等将依次经过浮动标志镜:驱动单元接收到B0信号时,将校验位置同时计算出减速点;接收到B1信号时,开始减速。在减速阶段,驱动单元一方面监控船厢速度进行停机保护;接收到B2信号时,若速度v仍然在vm2以上(vm为船厢正常升降的额定速度,vm=0.2 ms),执行快速停机程序;接收到B3信号时,若速度仍不为0,再次启动快速停机程序;接收到B4信号时,迅速执行紧急停机程序。
同时,驱动单元判断船厢位置与航道水位的差值是否满足准确停位要求。准确停位信号是船厢对接停位效果的综合反馈,后续流程只有接收到此信号才能正常进行。原自动对位控制程序里,仅在接收到B3信号时判断船厢位置与航道水位偏差,且要求偏差在0.1 m以内。自动对位控制原理如图3所示,要求同时满足速度、位移和偏差量的判断,严格的控制条件用以充分保证三峡升船机对接停位的安全。
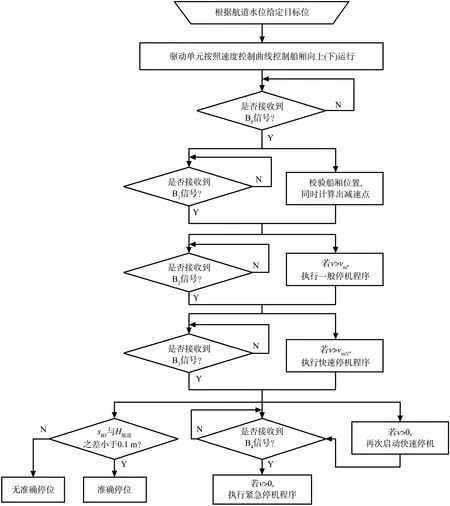
图3 优化前自动对位控制原理
2.3 准确停位优化
原自动对位仅在接收到B3信号时判断船厢位置与航道水位的关系,且要求满足0.1 m的偏差,控制条件过于严苛,在实船试航和试通航初期,经常发生准确停位信号不到而要重新对位的故障。后来,在原基础上逐渐优化,系统的速度控制过程不变,仅对准确停位的判断条件进行优化,优化后的控制原理如图4所示。
1)将B3信号时的偏差从0.10 m逐渐放宽至0.15 m、再到0.20 m;
2)增加了对B2信号时的偏差判断,将此时船厢的位置加(下行为减)s2→3的距离与航道水位之差在0.15 m以内(相当于预判B3信号的偏差);
3)考虑到小行程重新对接的情况,对仅有B3信号时,同正常对接的偏差要求;
4)补充人为干预的控制措施,即停位时若出现偏差大故障或对点超时故障,人工复位后再次判断偏差,若满足同样可以获取准确停位信号。
优化以后,船厢停位故障大大减少,初期阶段几乎每天都出现,迄今除非水位波动剧烈或者装置卡阻,已很少出现此类故障。

图4 优化后自动对位控制原理
3 上下游对接运行情况及分析
3.1 对接运行情况
为直观地了解对接运行的情况,首先定量分析船厢对接期间航道水位变动情况,同时研究对接停位期间船厢的运行状态。
1)分别采集船厢向上和向下运行过程中航道水位的变化值(表1)。
可见,上游变幅较稳,基本在0.02~0.03 m范围内,且幅值不大,均值0.024 m。下游变幅明显高出上游且变化较大,平均变幅0.2 m,最大幅值超出0.3 m。
2)采集对接停位期间船厢位移和驱动电机速度2种参数,为增加可比性,以检测到B0信号为时间起点,以此时的船厢位置为参照零点,采用差值法对位移进行处理,向上为正值,向下为负值。为区别运行方向的不同,将驱动电机速度标为正负,规定正值时船厢上行,负值时船厢下行。船厢位移、驱动电机速度随时间的变化曲线如图5、6所示。
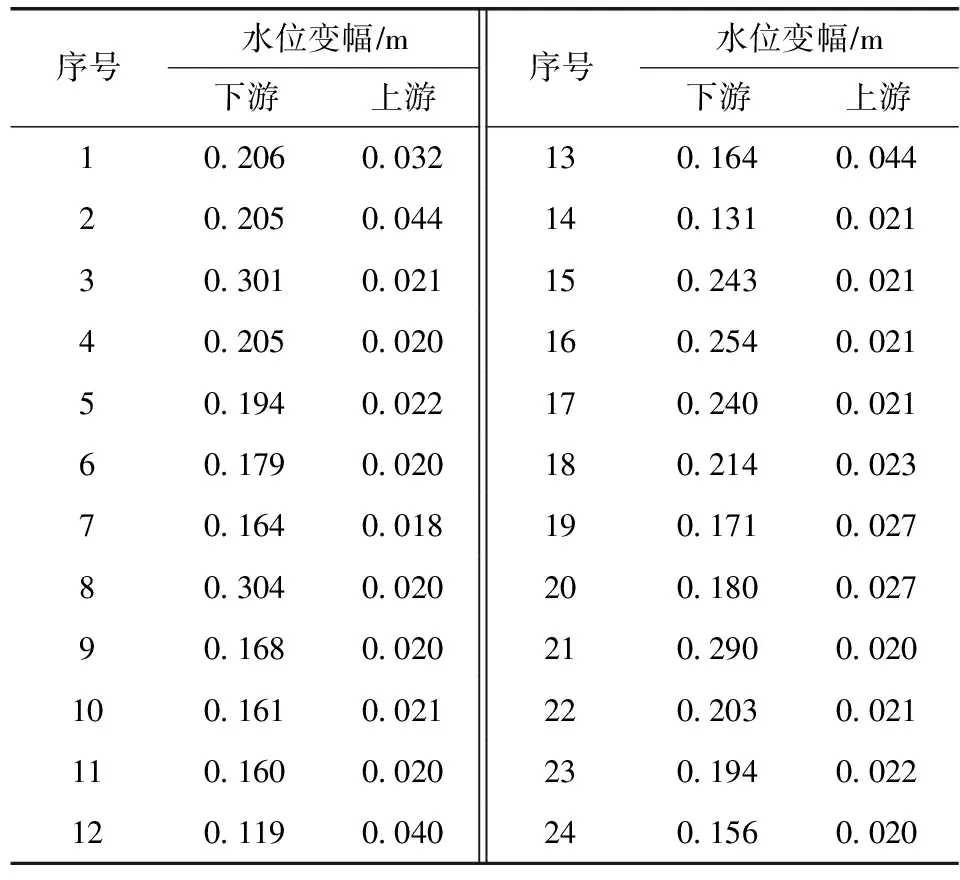
表1 船厢运行阶段上下游水位变幅 m

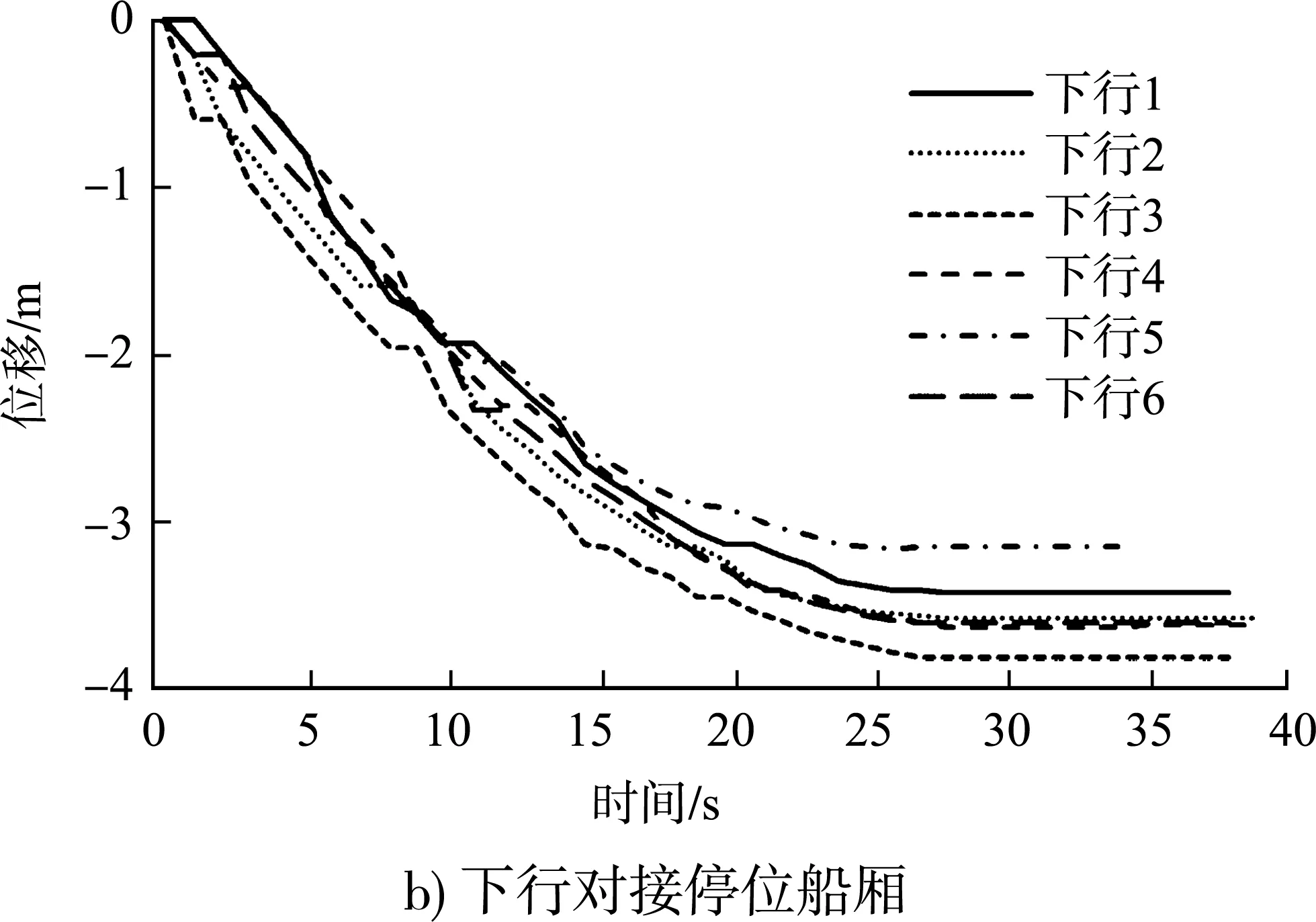
注:每条位移曲线分别为一次对接停位,即从B0到停止的过程。
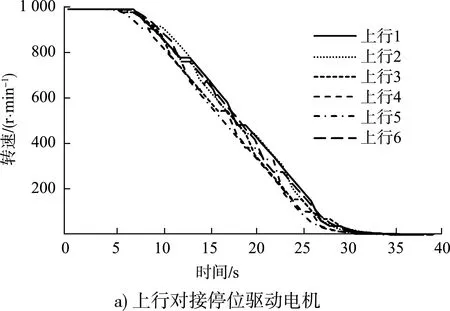
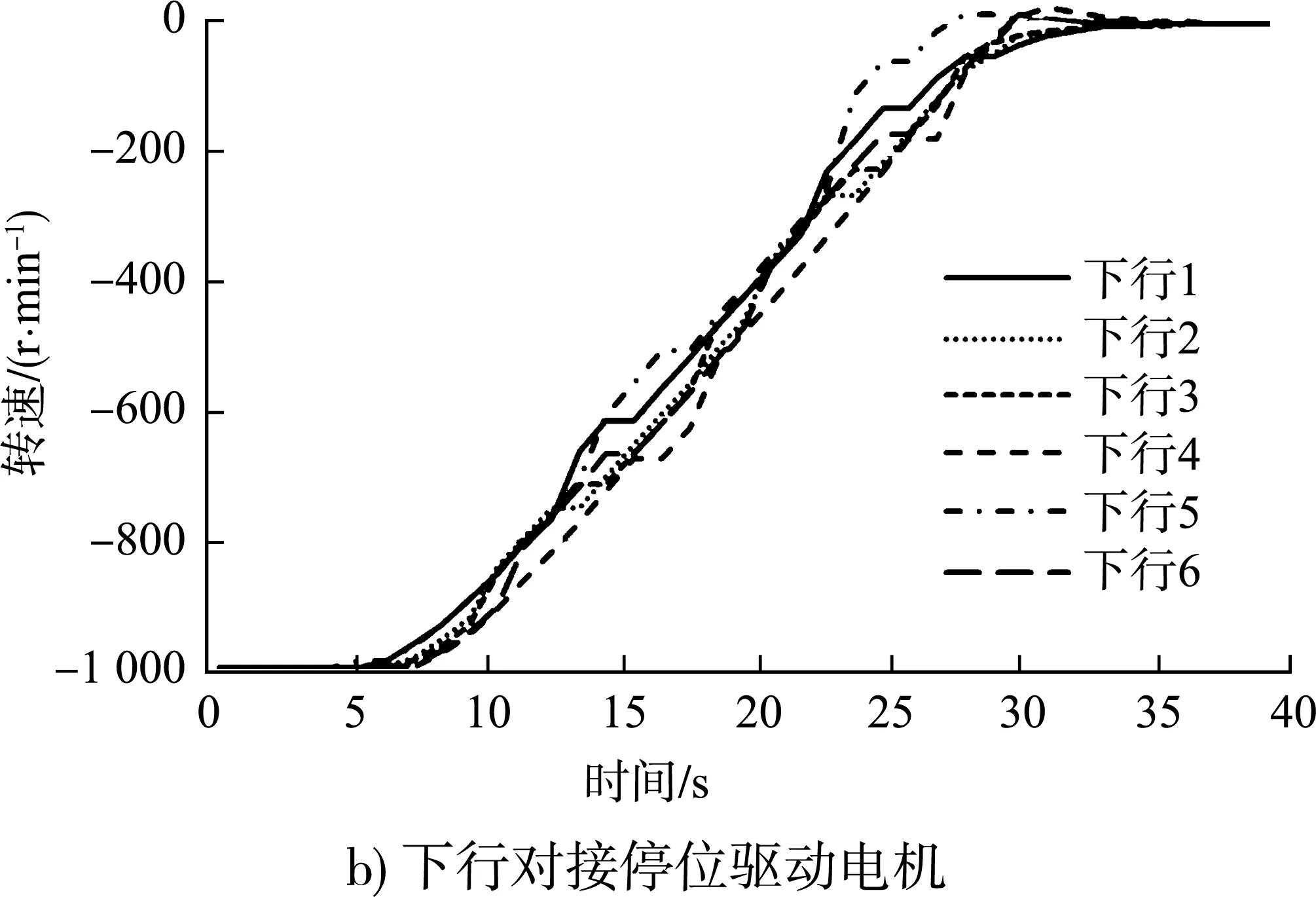
注:每条转速曲线分别为一次对接停位,即从B0到停止的过程。
从图5可以看出,从接收B0至最后停止这一过程中,上行时船厢的位移趋于3.5 m,下行船厢位移趋于3.6 m。从图6可以看出,下行对接停止前驱动电机,减速平滑度较差,且转速存在从负值到正值的突变,船厢从下行向上行的转变,向上运行的电机转速高达25 rmin,船厢上行10~15 mm。此变化发生在停止前10 s左右。
3.2 结果分析
上游对接,航道水位变幅较小,船厢停位比较集中,稳定性更好,因而驱动电机运行也较平稳。相比而言,下游对接时,航道水位变幅突出,船厢停位比较离散,驱动电机在停止前速度变化明显,甚至出现反向运行的现象。承船厢总体质量庞大,这种不均匀的减速和瞬时反向运行需要克服很大的惯性,对船厢驱动设备会有很大影响。从速度变化的角度看,适当修正下行减速停位的速度控制过程、降低斜率可以弱化速度突变的程度,增加运行的平滑性,减轻对设备的影响。
4 结论
1)为了使船厢对接运行能够适应一定的航道水位变化,将停位(B3)时船厢与航道水位的偏差依次设置为0.10、0.15、0.20 m,将B2时的航道水位偏差转化为B3,同时将偏差约束在0.15 m判断,2种结果均作为准确停位的评价标准。通航运行实践表明,该控制方法既能保证运行的安全性,又能减少停位故障的发生。且增加复位再次判断偏差的人为干预措施,可以减少不必要的重新对接,有效地提高了运行效率。
2)下游水位变动在对接停位期间存在对设备的影响。可以适当修正下行减速停位的速度控制过程、降低速度曲线斜率,以弱化速度突变的程度,增加运行的平滑性,从而减轻对设备的影响。