无人机机载激光雷达扫描系统在抽水蓄能电站工程中的应用研究
2020-02-22
(中国电建集团中南勘测设计研究院有限公司,湖南长沙 410014)
0.引言
在抽水蓄能电站工程建设中,地形复杂、传统测绘工作难度较大、人力物力成本高而效率低,已经不满足社会发展需求。近年来,随着无人机技术的快速发展,传统测绘已经向信息化测绘迈进,航测以其高效率、低成本、成果多样的特点,在测绘领域得到了全面的应用。特别是无人机航测,相比传统航测又是巨大的进步,现在可以实现免像控高精度的测量。但抽水蓄能电站工程环境一般都是密林山区,测绘难度大,无人机航测无法拍摄到植被茂密的地面,因此无法获取次此环境中的地表地形,而机载激光雷达技术可以弥补这方面的不足。
机载激光雷达(LiDAR)集成了GPS、IMU、激光扫描仪、数码相机等光谱成像设备[1-3]。激光扫描设备装置可记录一个单发射脉冲返回的首回波、中间多个回波与最后回波,通过对每个回波时刻记录,可同时获得多个高程信息,将IMU/DGPS系统和激光扫描技术进行集成,飞机向前飞行时,扫描仪横向对地面发射连续的激光束,同时接受地面反射回波,IMU/DGPS系统记录每一个激光发射点的瞬间空间位置和姿态,从而可计算得到激光反射点的空间位置(三维坐标点云)。
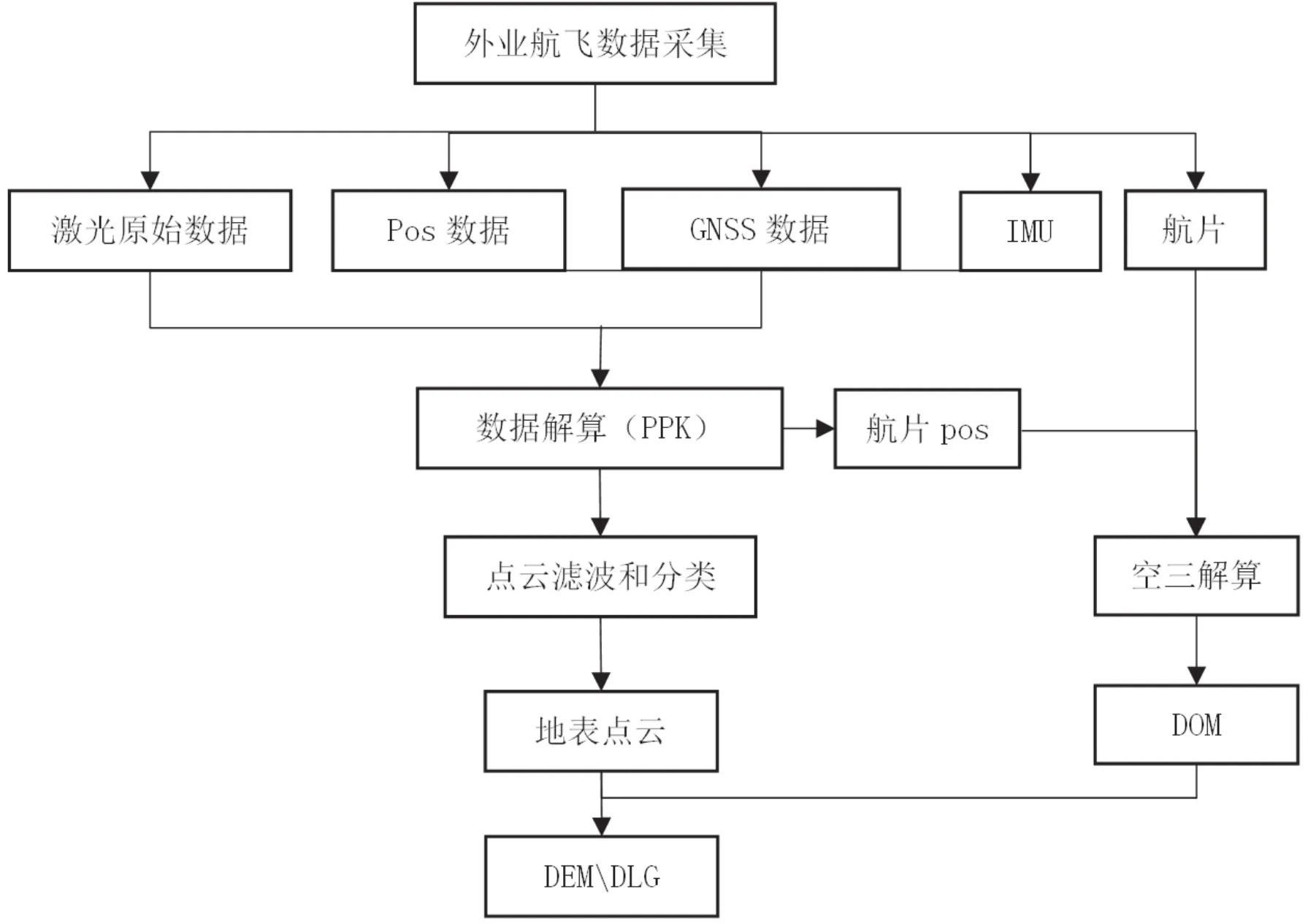
图1 地表点云获取技术流程
应用分类(Classification)技术在原始三维坐标点云数据中移除建筑物、人造物、覆盖植物等测点数据,即可获得地面数字高程模型(Digital Elevation Model, DEM),据此可以生产常规的地形图(DLG)等测绘产品。产品拓展还可用于三维设计、建设征地勘测定界、数据库数据融合叠加及对比分析、断面数据提取、工程量计算、库容计算、施工进度汇报等。
机载激光雷达(LiDAR)的技术优势有[4-5]:(1)穿透性强。激光雷达能够很好的穿透植被区域,获取植被下的地面数据;(2)数据获取面积大,速度快。利用无人机平台能够快速获取大面积的点云数据;(3)精度高。利用高精度的GPS/IMU传感器,激光雷达获取的数据具有较高的相对精度和绝对精度。
1.试验区概况
抽水蓄能电站是利用电力负荷低谷时的电能抽水至上水库,在电力负荷高峰期再放水至下水库发电的水电站,又称蓄能式水电站。典型抽水蓄能电站由上、下水库、引水洞、发电厂房、输变电设施等结构组成。
本文试验区抽水蓄能电站上、下水库落差约700m,平均海拔约800m,工程勘察范围面积约12km2,工程区地势起伏、沟谷纵横、山高坡陡、植被茂盛。
2.试验方法
为满足可研设计质量和进度要求,需在短期内完成抽水蓄能电站工程范围12km2的1:500地形测量工作。经技术设计,常规测量作业难度大,摄影测量很难满足高程精度要求,无人机搭载轻型激光雷达方案具备作业成本低、设备起降简单、机动灵活、低航高、单位面积点云密度大等优点。最终确定采用无人机机载激光雷达扫描系统进行测绘,具体技术流程如图1。
2.1 航飞采集点云数据和数码影像
(1)根据测区范围、地形地物条件、成图精度等要求进行分区设计、航高设计、航带划分、航线设计、重叠度设计等。
(2)选取气象条件良好的合适时间段开展航飞作业。
(3)定位定姿设备采用中海达的海达数云Hi-POS组合导航系统,机载GPS记录无人机飞行轨迹,通过事后差分获取系统的位置和姿态参数。
(4)激光扫描测量。设置好飞行速度、扫描镜的摆动方向和摆动角度、激光脉冲频率、激光反射镜转动速度,无人机沿航线飞行时,激光发生器不停发射激光通过扫描镜运动反射,使激光束扫向不同角度。激光束遇到物体反射回来,被激光雷达设备上感应单元接收,根据激光发射到接收的时间差,测出距离。
(5)通过搭载的数码相机按无人机摄影方式获取影像,与激光扫描仪的定位定姿设备同步记录影像曝光时刻位置和姿态。
2.2 数据处理
将基站GPS采集的静态数据和机载设备采集的实时POS数据进行差分解算,得到飞行的轨迹数据,再利用点云融合软件将轨迹和原始激光数据融合出点云数据。点云数据经过分类处理、编辑,提取有效的地面高程点后生成数字高程模型(DEM)。
2.2.1 DGPS解算
利用GPS静态数据和机载实时获取的POS数据以及基站的已知坐标进行PPK后差分结算,得到高精度的POS数据。
2.2.2 数据融合
采用数据融合软件进行激光数据融合,生成点云文件。激光器的角度和位置偏移量是出厂前由设备检验人员进行严格标定获得。
2.2.3 点云分类
先使用Terrasoild软件的T-scan模块对点云数据进行自动分类[6-8]。
再结合T-model模块,用地面点生成可编辑的模型(Editable model),参考模型及点云来进行手动精细分类,得到地表点云,进而利用地表点云生成DEM[9-10]。
2.2.4 制作DOM和DLG
通过机载的POS设备,得到相机拍照时刻的外方位元素,结合原始影像,刺入少量控制点,进行空中三角测量处理,输出正摄影像(DOM)。
由于现场高差较大,采用立体采集的方式采集道路、田埂、地类界等地物信息,结合DEM得到DLG。
由于建筑物的层数材质、涵洞出水口等信息无法从点云和正射影像图中识别出来,还需要进行外业调绘补测。
3.数据检验和分析
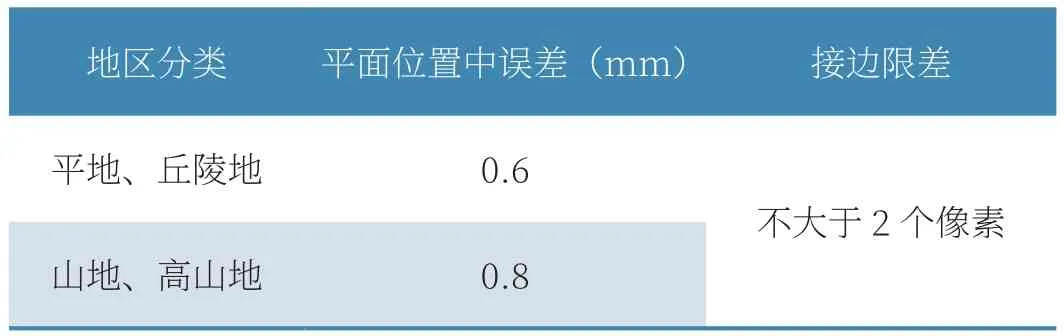
表1 1:500 DOM精度要求
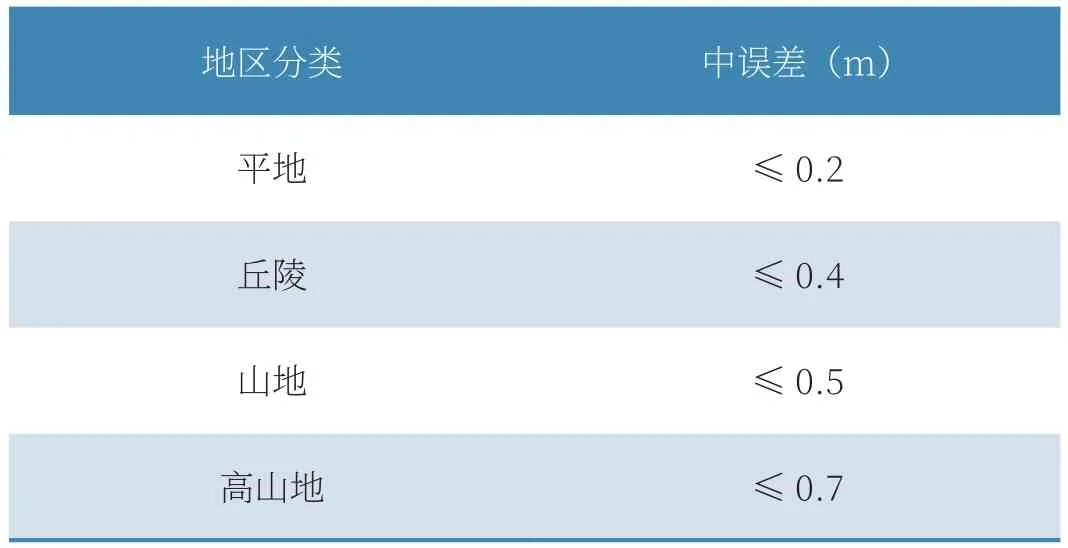
表2 1:500 DEM高程插值精度
根据上一节的技术流程,获取了试验区的地表点云、DEM和DOM。为检验扫描成图的精度,按照航测1:500比例尺成图的平面位置中误差和高程插值精度要求(见表1和表2所示),通过对居民区、无植被区、不同类型不同郁闭度植被区实测了检查点,精度统计如表3所示。点云数据都是离散的三维点,不容易比较平面精度。借助点云编辑处理软件,切片自动提取房屋轮廓,比较房角的平面位置。
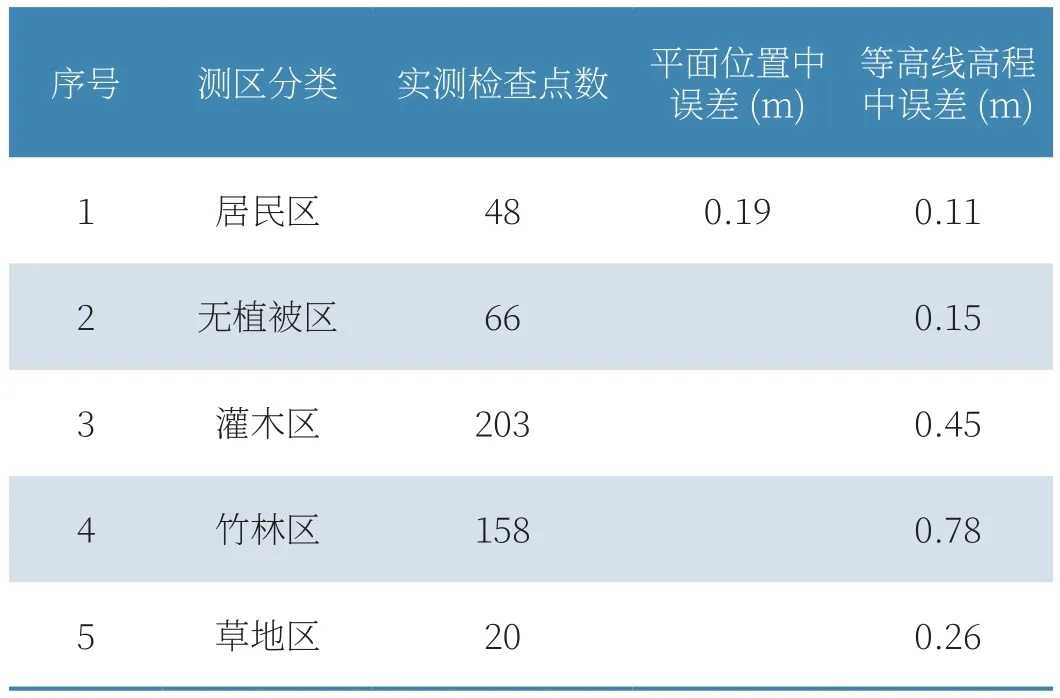
表3 扫描成图精度统计
从表3可以看出,竹林区郁闭度高,激光穿透性差,获取地面反射点稀少,影响地形精度,实测检查等高线高程中误差超限。此类局部区域通过实测成图替换激光扫描成图,以满足1:500地形图精度要求。
4.结论和展望
(1)无人机机载激光雷达扫描系统在抽水蓄能电站1:500地形图测绘中比传统人工测量外业效率高(自动扫描)、比摄影测量精度好(可穿透树障)。
(2)为满足1:500地形图测绘平面和高程精度要求,应根据地形情况和植被情况增加布设航线。抽水蓄能电站地形起伏大,实际重叠度和覆盖范围会因地形起伏而减小。布设航线应考虑实际重叠情况,避免产生航飞漏洞。航线宜垂直山沟水流方向,至少应保证山沟正上方有航线,植被高而密时,应加密航线,保证5m~10m间距内有激光束能穿透树障到达地面。
(3)当局部测区激光束无法穿透密集植被、水面无法反射回波、点状地物无法分辨等情况下,应采用人工实测的方法采集测点数据,与点云数据融合进行DLG生产。
(4)点云数据海量,内业数据处理工作量大,合理的分区处理,既能提高效率又能保证点云精度。