局部闭链码垛机器人轨迹规划
2020-02-18余亮王鹏张龙
余亮 王鹏 张龙

摘 要:基于任务需求及生产现场布置方案,完成机器人弧线过渡路径规划.依据路径规划结果,以机器人在目标轨迹上运行周期时间最短为目标,选择正弦、多项式及修正梯形三种加速度运动规律进行优选.在此基础上,通过运动学逆解将操作空间轨迹规划映射到关节空间,得到机器人各关节在目标轨迹上的位移、速度和加速度时变关系.
关键词:码垛机器人;轨迹规划;运动规律
中图分类号:TP242.2 文献标识码:A 文章编号:1673-260X(2020)01-0032-04
机器人轨迹规划[1],是指机器人末端在工作过程中的位姿变化取向、路径及运动规律的人为设定.轨迹规划可归结为关节空间规划和操作空间规划两类[2],关节空间下轨迹规划是指以机器人关节角度的函数来描述机器人轨迹[3],操作空间轨迹规划是指用时间函数表示机器人末端运动规律.由于码垛机器人其运动学逆解较简单,故选择在操作空间下进行轨迹规划.
操作空间下轨迹规划通常包括以下两方面[4]:(1)路径规划,即根据机器人的任务需求以及工作空间范围,选择一条满足路径和障碍约束且较为合理的路径;(2)运动规律优选,即在路径规划基础上,完成机器人运动规律和控制策略的优选,并且通过运动学逆解生成机器人运动的位移、速度和加速度实时值.对于运动规律研究,通常可采用简谐组合运动规律和多项式运动规律等.
机器人轨迹规划是保证其高速精确运动的前提,国内外学者对此做了大量深入地研究.韩江等[5]提出一种采用高次多项式和B样条混合插值的优化方法,能够使机器人关节运动学参数连续无突变.吕鲲等[6]采用三次样条插值法,提出一种使机器人轨迹最优的规划方法对各关节进行轨迹规划.Kahn和Roth[7]就对PTP运动时间最优的轨迹规划问题做了探讨.Wong和Fu[8]使用分层正交空间方法研究了三维路径规划.Bobrow I E[9]依据时间最小准则优化了机器人运动路径.
上述研究主要针对的是机器人路径规划和算法效率,对于不同运动规律对运行周期的影响缺乏深入研究.因此,从路径规划及运动规律优选两个层面出发,在完成码垛机器人路径规划的同时,以运行周期时间最短为目标,探讨不同运动规律对于机器人运行周期时间的影响,对于提高机器人工作效率具有十分重要的意义.本文以PT1300型码垛机器人[10]为例,机器人在运动过程中,速度必须平稳过度且不能产生突变,以免造成冲击和震动,这就要求其运动规律至少应满足以下两点[11]:(1)末端执行器始末两点速度、加速度为零;(2)位移曲线对时间的一阶、二阶导数连续,三阶导数(Jerk)有上界.据此,本文选取正弦、3-4-5次多项式和修正梯形三种加速度模式作为运动规律优选对象,以求在相同条件下,从三者中选取使得机器人运行周期时间最短的运动规律.最后,依据路径规划及运动规律优选结果,得到时间最优运动规律下,各关节在目标轨迹上的位移,速度和加速度时变关系.
2 路径规划
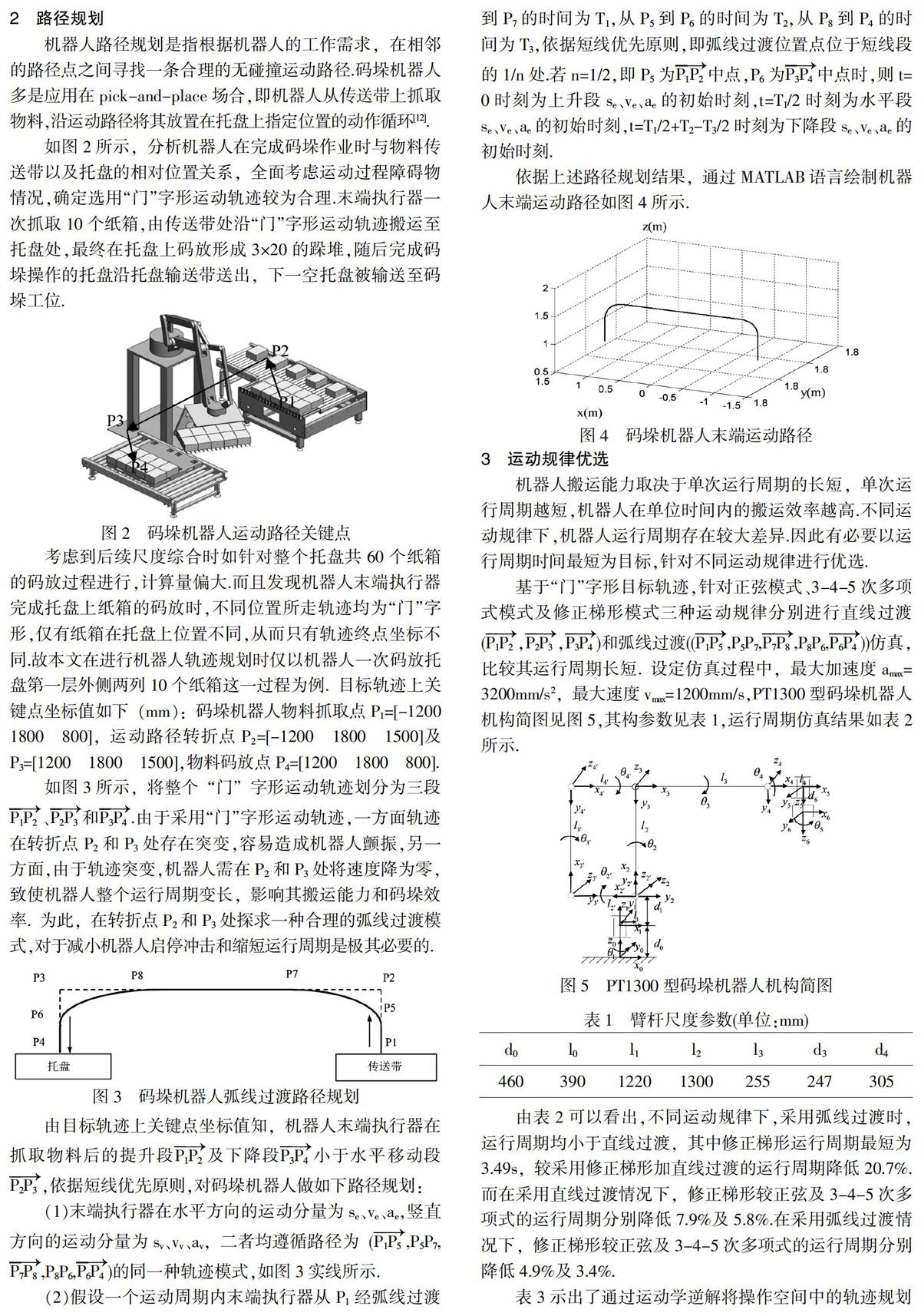
机器人路径规划是指根据机器人的工作需求,在相邻的路径点之间寻找一条合理的无碰撞运动路径.码垛机器人多是应用在pick-and-place场合,即机器人从传送带上抓取物料,沿运动路径将其放置在托盘上指定位置的动作循环[12].
如图2所示,分析机器人在完成码垛作业时与物料传送带以及托盘的相对位置关系,全面考虑运动过程障碍物情况,确定选用“门”字形运动轨迹较为合理.末端执行器一次抓取10个纸箱,由传送带处沿“门”字形运动轨迹搬运至托盘处,最终在托盘上码放形成3×20的跺堆,随后完成码垛操作的托盘沿托盘输送带送出,下一空托盘被输送至码垛工位.
考虑到后续尺度综合时如针对整个托盘共60个纸箱的码放过程进行,计算量偏大.而且发现机器人末端执行器完成托盘上纸箱的码放时,不同位置所走轨迹均为“门”字形,仅有纸箱在托盘上位置不同,从而只有轨迹终点坐标不同.故本文在进行机器人轨迹规划时仅以机器人一次码放托盘第一层外侧两列10个纸箱这一过程为例.目标轨迹上关键点坐标值如下(mm):码垛机器人物料抓取点P1=[-1200 1800 800],运动路径转折点P2=[-1200 1800 1500]及P3=[1200 1800 1500],物料码放点P4=[1200 1800 800].
如图3所示,将整个“门”字形运动轨迹划分为三段、和由于采用“门”字形运动轨迹,一方面轨迹在转折点P2和P3处存在突变,容易造成机器人颤振,另一方面,由于轨迹突变,机器人需在P2和P3处将速度降为零,致使机器人整个运行周期变长,影响其搬运能力和码垛效率.为此,在转折点P2和P3处探求一种合理的弧线过渡模式,对于减小机器人启停冲击和缩短运行周期是极其必要的.
由目标轨迹上关键点坐标值知,机器人末端执行器在抓取物料后的提升段及下降段小于水平移动段,依据短线优先原则,对码垛机器人做如下路径规划:
(1)末端执行器在水平方向的运动分量為se、ve、ae,竖直方向的运动分量为sv、vv、av,二者均遵循路径为的同一种轨迹模式,如图3实线所示.
(2)假设一个运动周期内末端执行器从P1经弧线过渡到P7的时间为T1,从P5到P6的时间为T2,从P8到P4的时间为T3,依据短线优先原则,即弧线过渡位置点位于短线段的1/n处.若n=1/2,即P5为中点,P6为中点时,则t=0时刻为上升段se、ve、ae的初始时刻,t=T1/2时刻为水平段se、ve、ae的初始时刻,t=T1/2+T2-T3/2时刻为下降段se、ve、ae的初始时刻.
依据上述路径规划结果,通过MATLAB语言绘制机器人末端运动路径如图4所示.
3 运动规律优选
机器人搬运能力取决于单次运行周期的长短,单次运行周期越短,机器人在单位时间内的搬运效率越高.不同运动规律下,机器人运行周期存在较大差异.因此有必要以运行周期时间最短为目标,针对不同运动规律进行优选.
基于“门”字形目标轨迹,针对正弦模式、3-4-5次多项式模式及修正梯形模式三种运动规律分别进行直线过渡()和弧线过渡((,P5P7,,P8P6,))仿真,比较其运行周期长短.设定仿真过程中,最大加速度amax=3200mm/s2,最大速度vmax=1200mm/s,PT1300型码垛机器人机构简图见图5,其构参数见表1,运行周期仿真结果如表2所示.
由表2可以看出,不同运动规律下,采用弧线过渡时,运行周期均小于直线过渡,其中修正梯形运行周期最短为3.49s,较采用修正梯形加直线过渡的运行周期降低20.7%.而在采用直线过渡情况下,修正梯形较正弦及3-4-5次多项式的运行周期分别降低7.9%及5.8%.在采用弧线过渡情况下,修正梯形较正弦及3-4-5次多项式的运行周期分别降低4.9%及3.4%.
表3示出了通过运动学逆解将操作空间中的轨迹规划映射到关节空间后,修正梯形运动规律下,采用不同过渡模式时各关节的最大角速度及角加速度.由表中可看出,采用修正梯形运动规律加弧线过渡时,各关节最大角速度、最大角加速度较直线过渡无明显增加,对关节力矩影响不大,但运行周期时间较直线过渡却大幅缩短.
依据路径规划及运动规律优选结果,得到修正梯形加弧线过渡模式下,机器人在“门”字形目标轨迹上的位移,速度和加速度时变关系.如图6所示.
4 总结
以四自由度含局部闭链式码垛机器人搬运动作及生产现场布置方案为依据,对码垛机器人轨迹规划,得到如下结论:
1)依据物料搬运需求,提出一种对减少启停冲击及运行周期的机器人弧线过渡路径规划.
2)在路径规划基础上,以码垛机器人运行周期时间最短为目标,针对正弦、3-4-5次多项式及修正梯形三种运动规律进行运动规律优选,结果表明,相同条件下,弧线过渡比直线过渡运行周期明显缩短,同时在弧线过渡模式下,采用修正梯形运动规律在运行周期上明显优于正弦和3-4-5次多项式运动规律.
3)依据轨迹规划结果,得到修正梯形运动规律下,机器人在“门”字形目标轨迹上的位移,速度和加速度时变关系.
参考文献:
〔1〕Pfeifer F, A concept for manipulator trajectory planning[C], IEEE J. Rob. Auto, 1987,3: 325~330.
〔2〕Adam M, Jozef K, Basics of robotics: Theory and components of manipulators and robots[M]. Springer Wien New York Press, 1999,343~377.
〔3〕周旋.工業机器人最优轨迹规划问题研究[D].沈阳建筑大学,2016.
〔4〕孙玉德.以低能耗为目标的码垛机器人轨迹优化[D].天津大学,2017.
〔5〕韩江,谷涛涛,夏链,董方方.基于混合插值的工业机器人关节轨迹规划算法[J].中国机械工程,2018,29(12):1460-1466.
〔6〕吕鲲,陈宗元,张业明.装砖码垛机器人时间-冲击最优轨迹规划[J].机械工程师,2019(09):1-4+8.
〔7〕Kahn M E, Roth B. The near-minimum time control of open loop articulated kinematic chains[J]. ASME, Trans Journal of Dynamic Systems, Measurement, and Control,1971,93(3):164-172.
〔8〕Wong E.K, Fu K. S, A hierarchical orthogonal space approach to three dimensional path planning [J]. IEEE J. Rob. 1986,8 (30): 42~53.
〔9〕Bobrow I E, Optimal robot path planning using the minimum-time criterion[J]. IEEE J. Rob. Aut. 1988,4:443~450.
〔10〕张良安,单家正,马寅东,等.PT1300型局部闭链式码垛机器人动力学分析[J].山东科技大学学报,2013,32(02):79-84.
〔11〕张利敏.基于动力学指标的Delta高速并联机械手集成优化设计方法研究[D].天津大学,2011.
〔12〕洪超,钟昇,周鹏飞,等.激光切割机光路系统设计[J].锻压装备与制造技术,2013,48(01):56-59.
