星载高分辨频率步进SAR成像技术
2020-01-17丁泽刚
龙 腾 丁泽刚 肖 枫 王 岩 李 喆
(北京理工大学信息与电子学院雷达技术研究所 北京 100081)
(北京理工大学嵌入式实时信息处理技术北京市重点实验室 北京 100081)
1 引言
合成孔径雷达[1-3]是一种2维高分辨率微波成像雷达,它利用脉冲压缩技术实现距离向高分辨,利用合成孔径技术实现方位向高分辨。自1951年合成孔径的概念被Wiley[4]提出以来,合成孔径雷达一直在向着高分辨、宽测绘带的方向发展。目前典型的机载SAR系统已实现分米级甚至厘米级分辨率成像,其中美国Sandia实验室和General Atomics公司联合开发的Lynx SAR可实现0.1 m分辨率成像[5],德国Frounhofer高频物理与雷达技术研究所研制的PAMIR可实现0.05 m分辨率成像[6]。星载SAR系统目前也发展到了分米级分辨率成像的水平,其中美国FIA系统实现了优于0.3 m分辨率成像,德国TerraSAR-X实现了方位向0.16 m分辨率成像[7]。
高分辨率能增强SAR图像的地物表征能力,但也会给星载SAR的系统设计和信号处理带来新的问题。一方面,星载SAR的距离向分辨率取决于雷达信号带宽。受限于现有的器件水平,过大的信号带宽会给系统的发射、接收和处理带来极大困难。为降低硬件压力,可以使用频率步进技术,发射多个不同载频的子带信号,再使用子带拼接技术将子带回波合成为宽带回波[8,9]。目前世界上很多高分辨系统都采用了频率步进体制,以PAMIR系统为例,该系统最初能通过5个子带实现1.8 GHz的信号带宽[6],在2011年系统升级后其带宽进一步提升到3.6 GHz。然而在实际工程中,频率步进体制将带来脉冲重复频率增加、子带间能量泄露与子带间幅相误差等问题。这些问题会导致距离向测绘带宽度减小、脉冲压缩质量下降。因此,频率步进信号的时序设计以及精确的子带拼接方法是实现距离高分辨的关键技术。
另一方面,星载SAR的方位向分辨率取决于合成孔径时间。采用聚束模式或滑聚模式能够在波束宽度受限的情况下,通过波束控制的方式增大合成孔径时间,从而突破条带模式方位分辨率的限制。然而,由于星载SAR轨道弯曲严重、电波传输环境复杂,长合成孔径时间成像会受到诸多非理想因素的影响,例如成像参数空变[10]、“Stop-go”模型误差[11]、对流层传输延迟[11]与电离层导致的色散[12]。这些非理想因素大多存在时空变化的特性,它们会在信号中引入相位误差并在合成孔径时间内积累,最终导致距离徙动校正失败或图像散焦。因此,非理想因素的分析和补偿也是实现星载SAR高分辨成像所必须解决的问题。
针对上述问题,本文针对星载高分辨频率步进SAR的特点,介绍了频率步进信号的时序设计方法和子带拼接原理,给出了一种高分辨率成像算法与非理想因素补偿方法,最后进行了算法仿真和性能分析验证。本文结构如下:第2节介绍频率步进信号时序设计和子带拼接技术原理;第3节给出了星载高分辨率频率步进SAR成像算法与非理想因素补偿方法;第4节给出了成像仿真和性能分析验证;第5节对全文进行总结。
2 频率步进信号设计与子带拼接技术原理
2.1 高分辨星载SAR频率步进信号设计
频率步进技术能够实现大带宽信号发射,但同时也会引入脉冲重复频率增加、子带间能量泄露与子带间幅相误差等问题,而合理的信号时序设计能够在一定程度上减轻上述问题的影响。根据发射和接收信号的子带时序关系,频率步进SAR系统可分为3种基本工作模式:子带并发、脉内子带串发和脉间子带串发[13]。
(1)子带并发模式
各子带被调制到不同载频上,在同一时刻通过不同天线孔径发射出去,接收时使用N个独立接收通道接收对应的N个子带并进行解调处理,从而获得各子带的基带信号。子带并发模式的时序关系如图1所示,其中Tp为脉冲宽度,Bi为单子带带宽,B为总带宽。这种模式的优点是能节省发射脉冲的时间,不需要因为子带分割发射而增加系统脉冲重复频率,不影响系统时序设计。缺点是多子带同时发射或接收会导致射频兼容性问题以及能量泄露问题,进而影响子带拼接效果。
(2)脉内子带串发模式
各子带信号以一个大于脉冲宽度的时间间隔在一个PRT内顺序发射,接收时采用N子带接收机同时接收。脉内子带串发模式的工作时序如图2所示,其中ΔT为子带间的发射时间间隔。这种模式由于在发射子带间设置了保护时间,因此可以避免发射子带之间的射频兼容性问题,但由于各子带回波仍然只能通过滤波的方式在频域区分,接收时子带间的频谱泄漏问题仍然存在。
(3)脉间子带串发模式
该模式每个PRT仅发射/接收1个脉冲,其工作时序如图3所示。由于发射/接收子带在时间上完全分离,因此可以完全避免子带之间发射和接收的干扰。然而,脉间串发方式会增加系统所需PRF,进而导致距离向测绘带宽度减小。
对于子带数目较多的系统,上述3种方法难以在降低子带间干扰的同时保证测绘带宽度。此时可以将脉内子带串发和脉间子带串发结合,即使用交替串发模式。具体来说,可将所有子带分为两个或多个组合,组合内子带频谱互不相邻,可采用脉内子带串发的方式发射,不同组合则采用脉间串发的方式发射。通过这种方式,交替串发模式能够在避免子带间干扰的同时维持可接受的距离向带宽。

图2 脉内子带串发Fig.2 Sequential subpulses transmitted in PRT

图3 脉间子带串发Fig.3 Sequential subpulses transmitted interpulse

图4 高分辨率星载SAR子带交替串发设计结果Fig.4 Design result of subpulses transmitted alternatively for high resolution spaceborne SAR
以2.4 GHz的总带宽为例,若单子带带宽为400 MHz,则一共需要6个子带。若采用脉间串发模式,系统的PRF会增大为原来的6倍,测绘带宽度将降低为原来的1/6。若采用交替串发模式,将各子带按照中心频率的高低编号为1-6,可如图4所示,在奇数PRT中发射子带1,3和5,在偶数PRT中发射子带2,4和6。由于每个PRT内仅有3个互不相邻的子带,因此仅需设置3个通道进行回波接收和AD采样,且3个通道间不存在互相干扰的问题。此外,由于PRF仅增加了1倍,距离向测绘带宽仍然可以接受。
2.2 高分辨星载SAR频率步进信号子带拼接
频率步进信号的子带拼接处理可分为频域拼接[8]和时域拼接[9]两种方法。这两种方法都能够实现良好的拼接效果,因此可以根据后续处理算法选择合适的方法。由于频域拼接原理直观,因此论文采用频域拼接方法。
频域拼接方法的思路是,利用距离向信号脉压后相位为常数的特点,先将各子带信号进行脉压,然后变换到频域进行频谱拼接。在频域合成一个宽带信号脉压频谱后,再对频谱拼接处的相位跳变进行补偿,最终可得到宽带信号的脉压结果。
设第n个频点解调后的回波信号为

其中,t1为距离向时间轴,Tp是脉冲宽度,fc(n)是第n个频点的载频,Kr是距离向调频率,R是目标斜距,t0=2(R-Rmin)/c,Rmin是起始采样距离,c是光速,td(n)是第n个子带与第1个子带间的延迟。
对回波信号进行傅里叶变换,得到子带信号频谱Sn(f)

为进行脉冲压缩与时域对齐,将子带回波频谱与式(3)相乘

得到脉压后子带频谱

为了适应合成后的信号带宽,脉压后需对信号进行升采样。升采样倍数与子带数相等,升采样后信号形式不变。
设f0为第1个子带的载频,对于第n个频点,其载频为

为了恢复各子带的频率步进关系,在进行频谱叠加之前需进行频移操作,各子带的频率偏移量fshift(n)为

其中,N为子带数量。
频移后第n个频点的频域表达式为

将式(5)和式(6)代入式(7)得
式(8)最后1个指数项表明,频移后各子带频谱相位之间仍存在跳变。这会导致拼接信号脉压结果出现栅瓣。因此,为保证子带拼接时相位的连续性,需要对跳变相位进行补偿。补偿项可以表示为
补偿后的频域表达式为

将补偿后的各子带信号在频域叠加求和,即可得到带宽为N·B的宽带信号

需要说明的是,上述分析中假设不同子带的斜距是相同的。事实上,脉间串发时卫星的位置变化不可忽略,由此导致的斜距误差需要在子带拼接时进行补偿。另外,子带间幅相误差也会对子带拼接造成影响,相关分析将在第4节给出。
3 高分辨星载SAR系统设计和成像算法流程
3.1 高分辨星载SAR系统设计
星载SAR方位向分辨率由合成孔径时间决定。在波束宽度受限的情况下,传统条带模式难以满足高分辨成像需求,因此系统需要采用滑动聚束模式。将滑动聚束SAR波足速度与卫星速度之比定义为聚束因子A,那么滑动聚束SAR的分辨率可表示为

其中,Da为方位向天线尺寸。
以前面论证的子带交替串发系统为例,其距离向信号带宽为2.4 GHz。设方位向天线尺寸为10 m,那么若要在方位向实现与距离向匹配的高分辨率,聚束因子需设计在1/40左右,此时单点多普勒带宽为1400 Hz。考虑星下点回波时隙保护约束、发射信号时隙保护约束以及交替串发带来的PRF提升,可确定PRF范围为3000~4000 Hz。
在高分辨滑动聚束模式下,成像幅宽大,斜距历程变化大。如果采用固定PRF和固定采样延迟,会大大增加回波窗口长度,进而导致波位设计失败。这一问题需要通过变重频[14]方法解决,即在整个孔径过程中多次变换PRF和起始采样时刻,以适应回波延迟的变化。为使距离向点数对齐,系统接收回波时长为固定值。为确保回波接收完整,一般取整个合成孔径内的最大值为系统接收回波时长。
综上,高分辨率滑动聚束典型参数总结如表1所示。
3.2 高分辨星载SAR成像算法流程
由于星载SAR轨道弯曲严重、电波传输环境复杂,因此长合成孔径时间成像时会受到诸多非理想因素的影响,例如轨道弯曲、“Stop-go”假设误差、对流层误差和电离层误差。
(1)轨道弯曲
由于星载SAR几何关系的复杂性,星载SAR等效速度随方位空变、随高程空变的现象不能忽略,如图5所示。传统基于双曲线斜距模型的成像方法由于没有考虑等效速度的方位空变性,此时不再适用。文献[9]把超高分辨率情况下轨道弯曲导致的误差视为运动误差,并提出一种基于运动补偿的成像方法。另外,考虑到卫星上GPS定轨精度可达到厘米级[15],在构建投影网格时也能将DEM考虑在内,因此采用时域和其快速算法成像也是一种有效的处理方法。

表1 高分辨率宽测绘带滑动聚束典型参数Tab.1 Typical parameters for sliding spotlight SAR with high resolution and wide swath
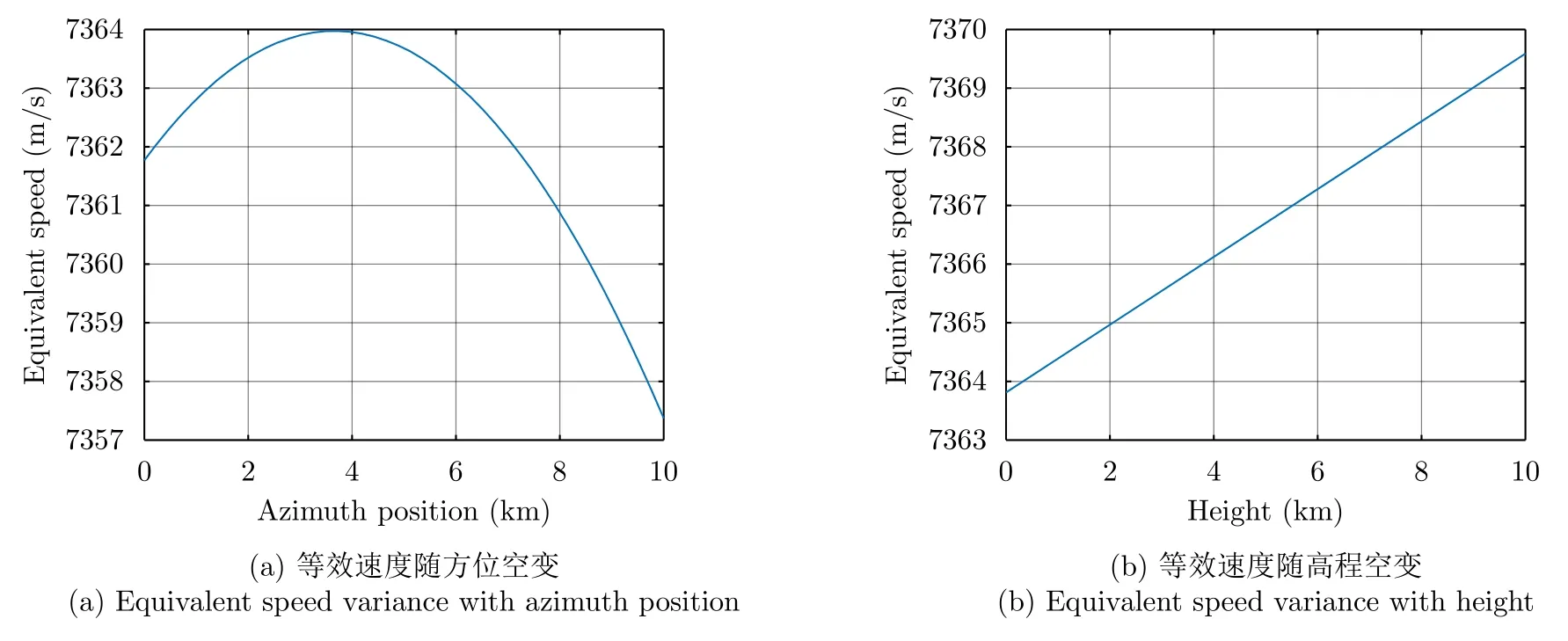
图5 轨道弯曲引起的等效速度空变Fig.5 Equivalent speed variance caused by curved orbit
(2)“Stop-go”假设误差[11]
在传统SAR成像算法中,通常假设平台在发射脉冲到接收回波期间是静止的,这种假设被称为“Stop-go”假设。当星载SAR分辨率提高到分米级时,“Stop-go”假设引入的误差不可忽略。
在慢时间方面,平台发射脉冲和接收脉冲的位置不同,因此目标在图像中会产生方位向偏移。由于不同距离门对应的延迟不同,上述方位向偏移会随着目标斜距而变化,如图6所示。“Stop-go”误差可以在距离多普勒域中通过式(13)进行校正

其中,r为距离轴,fa为方位向频率轴。

图6 “Stop-go”误差引起的方位向偏移Fig.6 Azimuth migration caused by stop-go error
在快时间方面,由于发射脉冲期间平台的运动,脉冲本身会产生频偏,频偏量等于瞬时多普勒频率。当多普勒带宽较大时,这一偏移会导致距离徙动校正失败,因此需要在2维频域进行校正。
(3)对流层误差
大气层中的对流层是影响电磁波传输的主要因素,它处于大气层的低层,高度约为10~14 km,电磁波在其中传输会产生明显的折射现象。对米级分辨率星载SAR来说,对流层折射现象对SAR成像的影响可以忽略。然而当雷达分辨率达到分米级时,该折射现象将引起合成孔径时间内的斜距误差,进而造成距离徙动校正失败和方位向散焦。在表2所示的典型大气参数下,当雷达工作时间为100 s时,电磁波传输路径延迟变化如图7所示。由图7可见,场景中心点在10 s合成孔径时间内斜距误差0.07 m,场景边缘点斜距误差在合成孔径时间内达到1.6 m,远超过1个距离单元,因此这样的斜距误差必须补偿。若方位向波束宽度内目标的斜距误差差异可以忽略,可以在回波域通过乘以相位exp(j4πΔR(ta)/λ)补偿,其中ΔR(ta)为随时间变化的斜距误差。

表2 典型大气参数Tab.2 Typical atmosphere parameters

图7 星载高分辨率SAR 100 s工作期间典型折射率下斜距误差的变化图Fig.7 Range error variance of spaceborne high resolution SAR in typical refractive index during 100 s operation
(4)电离层误差
地球的电离层高度约为60~2000 km,这也是现有所有星载SAR的运行轨道高度范围,因此星载SAR的发射和接收回波均要经过电离层。对于分辨率较低的星载SAR,电离层延迟引起的色散效应非常小,所以很少考虑其对成像的影响。然而,当分辨率达到分米级,信号带宽达到2.4 GHz时,电离层的散射效应对信号脉压的影响不能再忽略。根据卡普曼(Chapman)模型,电磁波在电离层中传播的延迟Δt可表示为

其中,K为常数,c为光速,f为信号频率,α为雷达下视角,TEC为电离层的积分电子含量。
电磁波传输延迟随频率的变化表明,可将电离层理解为一种色散介质,根据信号传播理论并考虑星载SAR信号的双程传播现象,由电离层色散效应导致的距离频域相位误差 Δφ为

由式(15)可以看到,电离层误差会在距离频域中引入随频率变化的相位误差,将相位误差进行泰勒展开,其二次项及高次项会导致图像散焦。表1所示参数对应的二次误差相位随TEC变化曲线如图8所示。由图8可见在TEC超过28 TECU时电离层带来的相位误差就会超过π/4,从而造成散焦。因此对于2.4 GHz带宽信号而言,当TEC达到28 TECU以上时,需要对电离层误差进行补偿。

图8 电离层导致的二次相位误差Fig.8 Quadratic phase error caused by ionosphere error
对于电离层误差,可以采用中国相关科研机构发布的TEC测量数据来补偿相关附加频域相位,还可以采用自聚焦的手段估计TEC,进而补偿电离层影响。
考虑到利用频域算法解决等效速度空变问题过于复杂[10],论文拟采用基于BP算法[16]的星载高分辨频率步进SAR成像。算法流程图如图9所示,首先进行对流层误差的补偿;接着在进行电离层误差补偿的同时完成子带拼接;再采用插值方法将方位向分段变重频信号恢复成均匀信号;进而进行距离向脉压;最后根据外部DEM实现空变的地形精确BP成像。
4 高分辨星载频率步进SAR成像仿真和性能分析
4.1 子带拼接仿真与误差分析
首先根据表1所示参数进行频率步进信号子带拼接的仿真。仿真采用子带交替串发模式,通过6个子带拼接得到2.4 GHz的总带宽,实现距离向高分辨率成像。子带信号与合成后宽带信号的频谱如图10(a)所示,可见单子带带宽为400 MHz而6子带合成后带宽达到2.4 GHz;子带信号脉压结果和合成后宽带信号脉压结果如图10(b)所示,旁瓣抑制采用-25 dB泰勒窗,可见合成后信号主瓣变窄,分辨率提升。

图9 高分辨率滑动聚束星载SAR成像算法总流程Fig.9 Flow chart of high resolution sliding spotlight spaceborne SAR imaging algorithm
需要说明的是,串发模式中各个子带收发位置并不一样,因此子带信号之间存在一定的斜距误差,且该误差在斜视角最大时(即刚开始工作时)达到最大。在表1所示参数下进行计算,可知此时沿轨道方向各个子带收发位置最大差异为1.9 m,对场景中目标斜距差为0.9 m,此时的斜距误差无法忽略。斜距误差引入的相位误差可以在各子带分别乘以相位exp(j4πΔR(ta)/λ)进行补偿,而包络误差则需要在距离频域乘以相应的时移因子进行校正。斜距误差主要导致的是子带间相位不连续,因此要保证子带拼接效果,斜距补偿精度需在次波长级。
此外,如第2节所述,实际系统通道间的不一致性会导致子带间存在幅相误差。为便于分析,在6个子带中取出两个子带,单独加入0 dB,10 dB,20 dB的幅度误差和0 rad,π/4 rad,π/2 rad的相位误差,经过子带拼接和脉冲压缩后,结果如图11所示。由图11可见,子带间的幅度误差会造成主瓣展宽、旁瓣提升和波形变化,而相位误差会造成旁瓣不对称。因此,在实际多通道系统中需要结合定标或者一些幅相误差估计和栅瓣抑制手段[17,18]来避免此类问题。
4.2 高分辨成像仿真与误差分析
首先使用表1所示参数对典型参数下的对流层误差进行点目标仿真,成像结果如图12所示。由图12可见,对流层误差能够引起明显的方位向散焦。此外,随着场景的增大,方位向边缘目标的对流层误差空变性也会增大,当合成孔径时间内的斜距误差变化超过1个距离单元时,会导致距离徙动校正失败。因此,在高分辨成像过程中,必须采取适当措施对对流层引入的斜距误差进行补偿。

图10 信号子带拼接前后对比Fig.10 Stepped frequency subband signal and simulation result of synthetic bandwidth

图11 加入幅相误差的子带拼接结果Fig.11 Compressed synthetic signal with amplitude errors and phase errors

图12 加入对流层误差的成像结果Fig.12 Imaging result with troposphere error
为分析电离层对成像的影响,分别对电子含量为0 TECU,20 TECU,40 TECU和60 TECU的情况进行仿真,成像结果如图13所示。由图13可见,在未补偿电离层误差的情况下,信号色散效应明显,图像有严重的主瓣展宽和旁瓣升高。因此,为了实现良好的聚焦效果,需采用自聚焦等手段进行电离层相位补偿,且补偿精度优于10 TECU。一般来说,自聚焦算法精度与信号信噪比、图像内容等因素相关。对于信噪比为0 dB的点目标信号来说,最大对比度算法的补偿精度能达到3 TECU以内,但对于相同信噪比的真实场景来说,算法性能会有所下降。
在分米级分辨率下,BP算法的成像网格中需要包含DEM信息,而DEM的精度也会对成像质量产生影响。图14展示了高程误差0 m,10 m,20 m,30 m时的成像结果,可见当存在DEM误差时,图像方位向会有散焦现象。要实现良好的聚焦效果,DEM的精度需达到10 m以上。
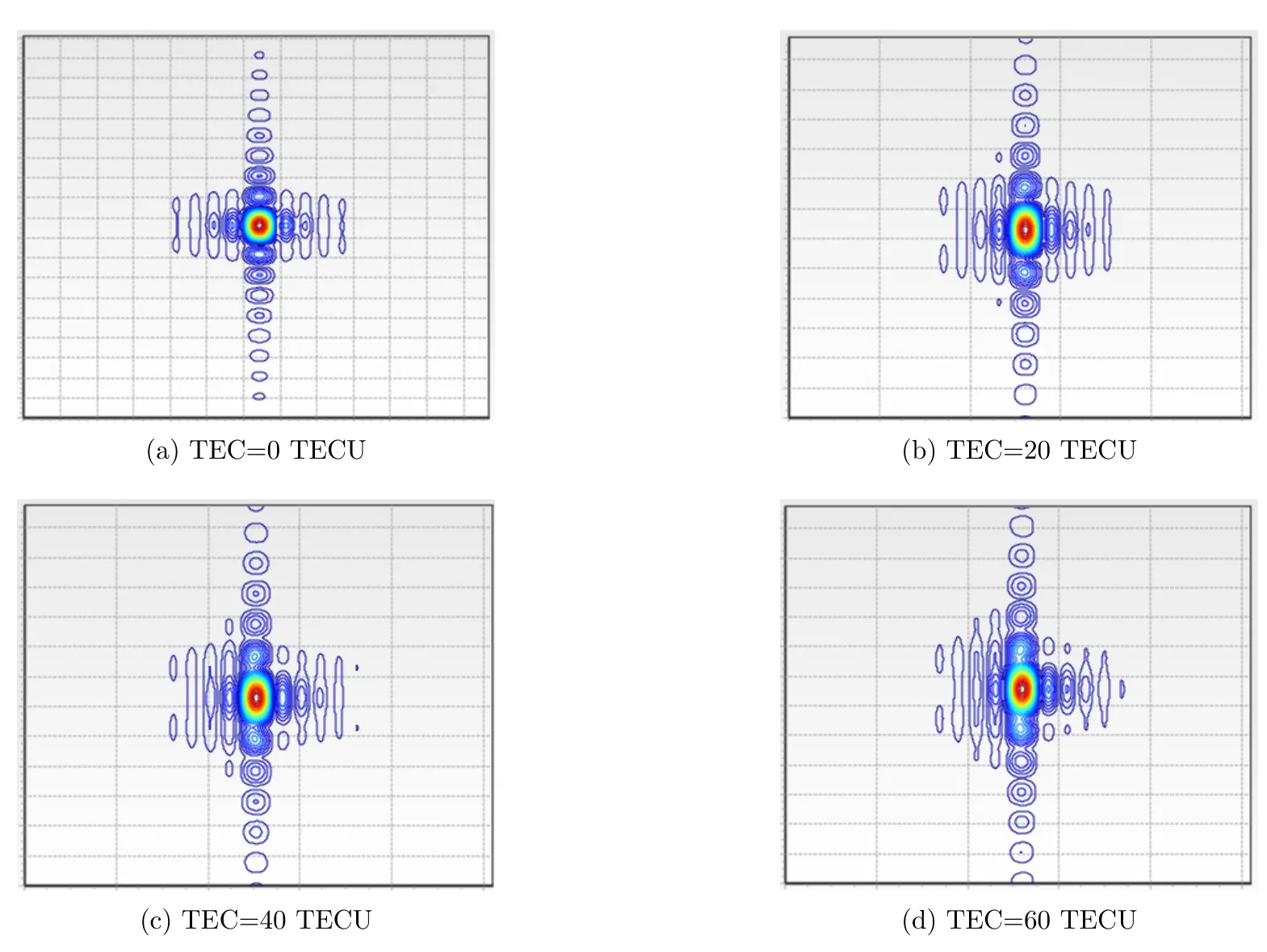
图13 加入不同电离层误差的成像结果Fig.13 Imaging results with different ionosphere errors

图14 加入不同大小DEM误差的成像结果Fig.14 Imaging results with different DEM errors
最后,进行高分辨率滑动聚束SAR的BP成像仿真。由于大场景数据量巨大,这里只仿真了2 km幅宽的场景,场景中设置3×3点阵,点目标两维间距为1 km。对仿真场景进行BP成像时,两维均加-25 dB的泰勒窗,成像结果如图15所示。
为评估该成像处理算法的有效性,取点阵中4个角点以及中心点对成像指标进行评估,结果如表3所示。由评估结果可见该成像算法能够满足高分辨率的成像要求,成像指标良好。
5 结束语
本文针对星载高分辨频率步进SAR成像的特点,分析了频率步进信号时序设计方法和子带拼接原理,给出了一种基于BP算法的高分辨星载SAR成像处理流程,分析了轨道弯曲、“Stop-go”假设误差、对流层误差、电离层误差和地形起伏等非理想因素的影响和补偿方法,并通过计算机仿真对所提方法进行了仿真验证。相关分析有助于高分辨率星载SAR成像处理和工程实现。

图15 高分辨率滑动聚束星载SAR点阵目标成像结果图Fig.15 Imaging result of dot targets with high resolution sliding spotlight spaceborne SAR

表3 高分辨滑动聚束成像评估结果Tab.3 Evaluation results of high resolution sliding spotlight imaging