大型射电望远镜面形精度测量方法研究综述∗
2020-01-16孔德庆陈志平
汪 赞, 孔德庆, 陈志平
(1.杭州电子科技大学机械工程学院,浙江杭州 310018;2.中国科学院国家天文台,北京 100101)
面形精度是射电望远镜的关键指标,决定了天线效率和最短可观测波长。观测波长λ、天线效率η与面形精度δ之间存在关系η=exp[-(4πδ/λ)2][1],性能优异的射电望远镜面形精度通常须小于最短可观测波长的1/15~1/20[2],而测量精度要达到面形精度的1/3~1/5[3]。可见,射电望远镜的观测波长越短,天线效率越高,对面形测量的要求越高。
随着射电望远镜口径不断增大、工作频段不断提高,面形测量方法也在不断发展以满足日新月异的射电天文与深空探测需求。英国的洛弗尔76 m射电望远镜(The Lovell Telescope)[4]、澳大利亚的帕克斯64 m射电望远镜(Parkes Radio Telescope)[5]、德国的埃费尔斯贝格100 m射电望远镜(Effelsberg Radio Telescope)[6]以及西班牙和法国共建的30 m毫米波射电望远镜(The 30m Millimeter Radio Telescope)[2]的面形测量最初采用经纬仪带尺法或其改进方法;日本的野边山45 m毫米波射电望远镜(Nobeyama 45m Radio Telescope)[7]的面形测量开始使用先进的全站仪;美国的格林班克100 m射电望远镜(The Green Bank Telescope)[8]、阿雷西博305 m射电望远镜(The Arecibo Radio Telescope)[9-10]以及中国的密云50 m[11]、天马65 m[12]、500 m口径球面射电望远镜(The Five-hundred-meter Aperture Spherical radio Telescope,FAST)[13]等的面形测量与调整逐渐采用更为先进的激光测量、摄影测量或微波全息等技术。
纵观面形测量方法的发展历程,可将口径不小于25 m的大型射电望远镜的面形测量方法分为4类:经典测量法、激光测量法、摄影测量法和微波全息法。本文通过对这4类方法的原理及应用进行总结与分析,为不断探索和创新望远镜面形测量方法提供一些参考。
1 大型射电望远镜面形测量方法研究现状
1.1 经典测量法
经典测量法主要包括经纬仪带尺法、经纬仪系统测量法、全站仪测量法、距离交会测量法等等。经典测量法是国内外大型射电望远镜的反射面在初装时通常采用的方法。
1.1.1 经纬仪带尺法
经纬仪带尺法测量原理如图1,利用金属带标尺在反射面上钻孔并放置靶标,然后用放置在反射面顶点上的经纬仪测量各个靶标的角度,据此计算靶标对应点的空间坐标同理想抛物面的偏差[14]。经逐点测量,归算后可以得到反射面面形的均方根差。对于大型射电望远镜,需要测量的靶标有数百甚至上千,一次完整测量通常历时长达8~10 h,测量工作十分艰辛。
国际射电天文研究所的30 m毫米波射电望远镜反射面单块面板制造精度达0.03 mm[15],用改进的经纬仪带尺法对反射面面形精度进行了测量,结果为0.12 mm[16]。20世纪70年代初,德国建成了当时世界上口径最大的可跟踪埃费尔斯贝格100 m射电望远镜,其反射面面形测量最初也是采用经纬仪带尺法,Φ80 m内测得的面形精度优于1 mm[17]。

图1 经纬仪带尺法Fig.1 Sketch of theodolite tape method
1.1.2 经纬仪系统测量法
经纬仪系统测量法基于多台高精度电子经纬仪,结合各种附件与软件系统,根据空间前方交会原理解算空间点坐标。图2为某大型天线面形测量系统布设。该天线面积约600 m2,均分为2个区,4台T3000A经纬仪施测。测量前先标定4台经纬仪的空间相对位置及姿态,系统定向完成后,1和2组合测1区,3和4组合测2区。根据测得的αi,βi,经数据处理可分别获得点P1与P2的三维坐标。经该法调整后的反射面,其面形精度可优于0.5 mm[18]。
中国电子科技集团第54所在研制我国第1个多波束天线时,构建了由T3000A和T2000S电子经纬仪、基准尺、数据传输电缆以及便携式计算机等组成的经纬仪测量系统,将天线面形精度控制在0.67 mm左右[19]。信息工程大学开发了经纬仪系统测量软件MetroIn,并基于该软件对大尺寸天线罩安装过程中的测量数据进行实时处理与分析,指导现场安装[20]。文[21]采用经纬仪系统测量法对Φ25 m天线反射面进行了重力变形测量,得到表面均方根为0.5 mm。
1.1.3 全站仪测量法
全站仪测量法在大型天线变形测量中应用广泛,相较于经纬仪系统测量法,它仅用一台全站仪即可实现所有的一般测量功能,成本较低。此外,它还具有构建系统快、测量时间短、操作简单等优点。测量原理如图3,通过测量水平角α、垂直角β和斜距s计算天线抛物面上待测点P的三维坐标(x=scosβsinα,y=scosβcosα,z=ssinβ)。

图2 经纬仪测量系统布设[18]Fig.2 Sketch of theodolite measurement system

图3 全站仪测量法原理Fig.3 Sketch of total station measurement method
日本的野边山45 m毫米波射电望远镜在安装调试的过程中,通过全站仪可将天线面形精度控制在0.2 mm左右[7]。美国于20世纪60年代建成当时世界上口径最大的固定式射电望远镜阿雷西博,首次安装测量采用全站仪,控制网的绝对精度达1 mm[3]。21世纪初,美国国家射电天文台在格林班克建成了100 m口径的可跟踪射电望远镜,初装时用全站仪结合经纬仪进行测量,得到天线的面形精度约1.1 mm[8]。
1.1.4 距离交会测量法
经纬仪系统、全站仪均是基于角度交会测量,而距离交会测量法是基于距离交会测量。因为角度误差对最终结果的影响随着测量距离的增大而增大,而距离误差则不然,故距离交会测量法的精度一般略高。距离交会测量法的原理如图4,抛物面上待测点不在测距点1、2、3构成的平面上。以点1为坐标原点;1、2连线为x轴;经过点1,由点1、2、3构成的平面的法线为z轴。首先进行系统标定,然后列出观测方程,测量n(n>6)个点共有4n个观测方程,而未知数为3n+6,最后可按最小二乘法求解。
美国国家射电天文台曾用三台测距仪对格林班克射电望远镜的主动反射面进行距离交会测量,面形测量结果的绝对精度优于1 mm[3]。为了掌握天线俯仰转动时的变形情况,工程人员又在天线基础地面上安装了12台特制的测距仪,如图4,使测距精度达到了0.05 mm,并将面形精度控制在0.3 mm以内[23]。
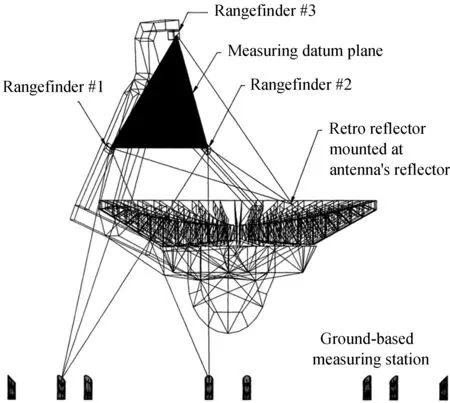
图4 GBT距离交会测量系统[22]Fig.4 GBT′s reflector surface measurement system
1.2 激光测量法
经典测量法施测费时费力,且测量结果好坏与测量人员的操作水平及工作时的情绪状态有很大关系。激光测量法以及后面的摄影测量法、微波全息法均无需人眼瞄准,基本消除了面形测量中人的因素对测量效果的影响,且在测量速度上较经典测量法有很大提高。
1.2.1 激光跟踪测量法
激光跟踪仪的测量原理和全站仪一样,但在测距方式、跟踪方式及结构设计等方面有所不同。激光跟踪测量系统由激光跟踪仪和便携式计算机两部分组成。一台激光跟踪仪包含五大部件:角度测量部件、距离测量部件、跟踪控制部件、控制部件和支撑部件。激光跟踪测量系统的测量精度高、速度快,且不易受人为因素的影响。
文[24]采用美国自动精密工程公司的LTS-3000激光跟踪仪测量系统对某天线进行测量,在测量范围内,其重复测量精度可达5 μm/m;采用绝对坐标测量时,其重复测量精度在10 μm/m左右。文[25]对徕卡激光跟踪仪的底层控制软件EmScon进行二次开发,解决了目标测量点自动快速精确定位问题,并通过模拟实验验证了其精度和测量效率。20世纪70年代,美国的305 m阿雷西博望远镜的面形测量曾尝试采用激光跟踪测量法,但由于当时技术条件的限制,测量单个靶标位置坐标及其误差所需时间约60 s,测得的靶标位置精度从0.8 mm到2.7 mm不等[9]。
1.2.2 激光扫描测量法
激光扫描测量法的本质是测距,按测距原理的不同,可分为非相干式和相干式。前者基于测量激光的飞行时间,后者基于测量激光的相位差。由于光速极快,非相干式测距在中小距离情况下的测距分辨率较低,而相干式测距的测量精度则较高。激光扫描测量法与激光跟踪测量法的不同在于前者不需要靶标作为合作目标,属于非接触式测量。
目前国外已开发了Focus S350,IMAGER 5010C,RIEGL VZ400等多款激光扫描测量产品。文[26]用RIEGL VZ400测量某桥梁挠度变化,当被扫桥底最远处与仪器相距400 m以内时,测量精度可达1 cm。文[27]研究了如何将三维激光扫描技术应用到古建筑变形监测与分析。文[28]就三维激光扫描仪技术的现状和发展、扫描仪原理、误差来源以及点云数据的配准进行了研究,提出利用同名点进行点云数据的配准并进行间接平差,可以获得满足精度的配准坐标。文[29]尝试利用RIEGL VZ400对天马65 m射电望远镜的反射面背架进行测量,在30 m范围内的测量效果较好。尽管运用激光扫描仪测量大型天线面形的实践较少,但从已开发的激光扫描测量产品的性能(表1)来看,在天线测量方面极具应用潜质。
表1 激光扫描测量产品Table 1 Laser scanning products

表1 激光扫描测量产品Table 1 Laser scanning products
Data from: https://www.faro.com/, https://www.zf-laser.com/, https://leica-geosystems.com/, https://www.riegl.com/.
Manufacturer Products type Range Accuracy in length and angle Characteristic FARO Focus S350 Min:0.6 m Max:350 m View field: 360°× 300°Scan rate:97.6 10k dots per second Operating Temperature: +5℃~+40℃Z+F IMAGER 5010C Min:0.3 m Max:187 m 1 mm Horizontal: 19″Vertical: 19″View field: 360°× 320°Scan rate:101.6 10k dots per second Operating Temperature: -10℃~+45℃Leica ScanStation P50 Min:0.4 m Max:>1 km 0.1 mm Horizontal: 1.44″Vertical: 0.72″3 mm Horizontal: 8″Vertical: 8″View field: 360°× 290°Scan rate:100 10k dots per second Operating Temperature: -20℃~+50℃RIEGL VZ-6000 Min:5 m Max:6 km 15 mm Horizontal: 1.8″Vertical: 1.8″View field: 360°× 60°Scan rate:30 10k dots per second Operating Temperature: 0°~+40°
1.3 摄影测量法
摄影测量法是大型建筑物或设备变形测量的通用方法。用摄影测量法对大型射电望远镜反射面进行测量时,首先,需要使用一台或两台工业相机在不同位置进行拍摄,得到天线反射面的两张或多张图像,这些图像称为立体像对[30];然后,用图像处理技术获取图像中天线反射面的像平面信息;最后,利用像平面信息,通过直接线性变换法、空间后方交会-前方交会方法、相对定向-绝对定向方法和光束法平差等坐标变换方法,确定图像中各点对应在物方空间坐标系中的绝对位置,以恢复天线反射面的三维信息。图5为基于近景摄影测量的天线反射面变形检测中的空间坐标转换关系,即摄影获得的天线反射面图像(图中最大矩形框)与天线反射面实际变形表面(图中曲线部分)之间的相互关系。
美国首先将摄影测量技术应用于天线测量。在阿雷西博望远镜的升级测量过程中,用摄影测量法共进行了3次测量,首次测量效果并不理想,得到的天线面形精度为15 mm,较预估值3.2mm有很大差距[31]。后采用CRC1工业相机进行摄像,最终坐标测量面形精度能够达到0.25 mm[32]。国内,文[33]用摄影测量法对毫米波以及亚毫米波天线面形进行测量,根据测量结果调整后的天线面形精度分别达到了0.083 mm和0.0055 mm[33]。文[34]研究了高低温环境下天线面形变形的近景摄影测量与数据处理技术。文[35]提出用仿真数据验证摄影测量精度的整体思路,以摄影距离、摄站环数、摄站间隔和所加像点误差4个参数为输入量,以点位误差为输出量,寻求天马65 m射电望远镜摄影测量的最优布设方案。文[11]采用摄影测量法对密云50 m射电望远镜在俯仰角分别为7°和30°时的反射面面形进行了测量和调整,调整后的面形精度均在2 mm以内。

图5 天线反射面变形摄影测量中各空间坐标系关系Fig.5 Sketch of antenna reflector surface measurement using photogrammetry
1.4 微波全息法
微波全息法属于系统性测量,可消除天线系统其他方面误差,量程大,精度高,测速较快,自动化程度高。微波全息法测量天线面形精度的原理如图6,对于理想抛物面,在焦点上的发射源发出的信号,经抛物面反射到达口径平面,其经历的光程相等(FP1+P1T1=FP2+P2T2)。然而,实际天线反射面并不是理想的抛物面,其理想表面上各点的切线与实际变形表面上对应点的切线间存在一个小的法向误差ε。只要测出发射源发出的信号到达口径面上各点时的相位或相位差,就可以通过运算求解天线面与理想抛物面之间的微小差别。
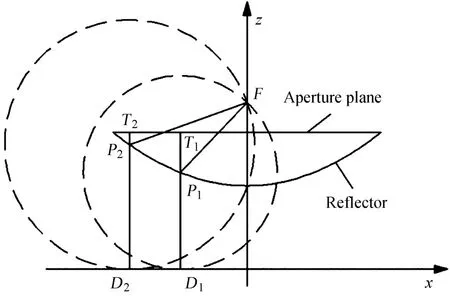
图6 微波全息法的几何原理Fig.6 Sketch of microwave holography
研究表明,可用间接方式测量口径面上的相位值,依据的物理原理是抛物面天线的口径场和远场存在二维傅里叶变换关系[36]。知道复数平面内天线远场的幅度和相位,可通过理论推导出口径场的幅度和相位;反之亦然。远场辐射T与微小表面形变ε的数学关系[13]:

其中,F-1[···]为二维逆傅里叶变换。
微波全息法的理论测量精度可以通过互相关后的信噪比评估[13]:

其中,N为天线网格扫描点数的平方根;RSN(O)为被测天线和参考天线同时指向信号时的互相关输出信噪比。
获取相位差的方法有相位相关法和相位恢复法,前者所需数据为远场幅值和相位分布,测量时参考天线需始终对准信号源;后者所需数据仅为远场幅值,无参考天线,口径场的相位分布根据远场幅度特性通过辐射模型迭代。面形测量结果好坏受相位恢复算法的影响,较为常用的相位恢复算法是米赛尔(Misell)算法[37]。该算法在30 m毫米波射电望远镜反射面面形测量中表现优异,测量结果精度达到0.02 mm[38]。仿真分析表明,米塞尔算法恢复的面形精度基本能满足我国新疆奇台在建的110 m射电望远镜的面形测量需要[39]。
微波全息法在20世纪60年代提出,但直至1977年才由SCOTT等人将其应用于天线面形测量,当时对5 km射电天文干涉阵列天线进行测量,面形精度达到了0.1 mm[40]。文[41]用该法对日本臼田深空中心(Usuda Deep Space Center,UDSC)64 m射电望远镜反射面进行测量与调整,获得了0.54 mm的面形精度。国内,文[42]用相位相关全息法对佘山25 m射电望远镜主反射面进行了测量,调整面板后的面形精度达到0.52 mm[42];而后又用该法对天马65 m射电望远镜的主动面进行测量与调整,将面形均方根值从0.58 mm提升至0.28 mm[11]。
2 大型天线面形测量方法优劣对比与发展趋势分析
2.1 不同面形测量方法优缺点的比较
总结4类面形测量方法的可测范围、精度、测速与其他特点见表2。经典测量法在反射面初装时较为适用,但在后期面板调整和维护时若继续采用此类方法则存在明显不足。激光测量、摄影测量与微波全息技术部分或完全克服了经典测量法的测量范围小、精度低、测速慢、需靶标等缺点;其中,激光扫描法因测速最快,可实现全俯仰角度的测量,微波全息法属于系统性测量(可修正副面的精度)且量程最大,均有光明的应用前景。
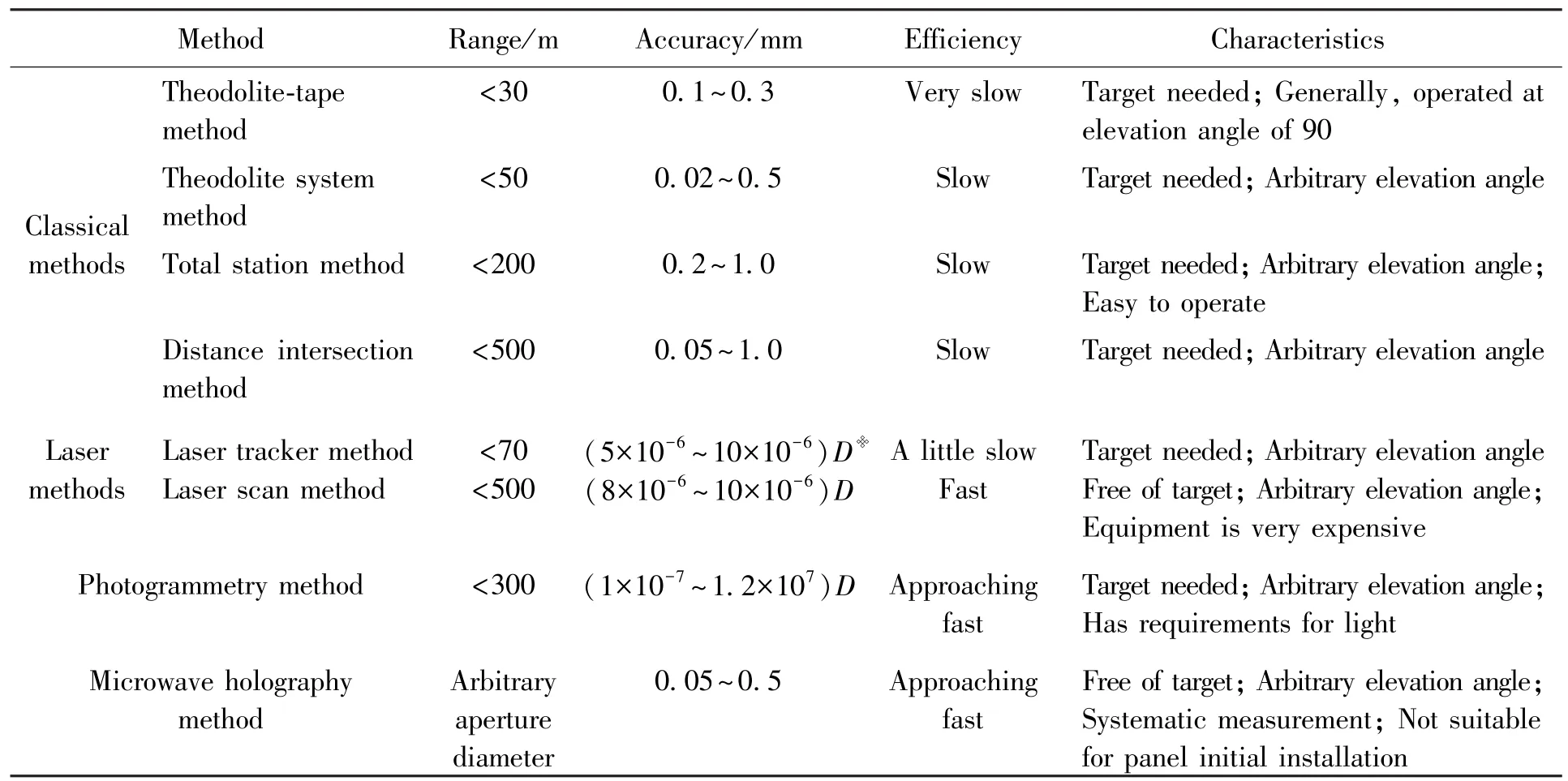
表2 大型天线面形测量方法对比Table 2 The four kinds of reflector surface measurement methods of large antenna
2.2 发展趋势分析
激光扫描、摄影测量和微波全息法是大型天线面形测量方法的主要发展方向,但同时这些方法也存在一些问题需要解决:激光扫描法在大型天线面形测量中的可行性尚需实验验证;摄影测量法的摄距通常在100 m以内,因此大口径天线的人工拍摄工作及后续的相片拼接处理复杂,同时为获得足够高的精度,需设置尽可能多的靶标,增加了测量准备期的工作量;微波全息法通常采用同步卫星作为投射信号源,因此天线俯仰角度受到限制,同时分辨率还受信号源强度和参考天线口径大小的影响。此外,这些方法均受光线、风、温度、沙尘等环境因素的影响。
未来面形测量方法必将朝着实时或准实时、高精度、自动化且不易受环境影响的方向发展。摄影测量法可借助无人机携带工业相机的方式消除拍摄工作的困难;微波全息法可利用特定射电源的宽带信号实现全俯仰测量,弥补利用同步卫星窄带信号测量的不足;激光测量法通过与微波全息法结合,可综合两种方法的优点,进一步提高天线面形测量精度。
3 总 结
本文为不断探索和创新望远镜面形精度测量方法提供了参考。
