北斗系统融合单点性能分析
2020-01-14王枭轩陆兆峰左小清杨泽楠布金伟谢文斌
王枭轩,陆兆峰,左小清,杨泽楠,布金伟,谢文斌
(1.昆明理工大学国土资源工程学院,云南 昆明 650093; 2.浙江省测绘大队,浙江 杭州 310030)
1 引 言
近年来,随着BeiDou导航系统的出现,和美国GPS、欧盟的GALILEO和俄罗斯的GLONASS共称为导航四大系统,使得多系统GNSS融合精密定位将成为未来GNSS精密定位技术的发展趋势[1-2]。单点定位时,定位精度受可见卫星数目的影响较大,在有建筑物或树木的遮挡区域,单系统的可见卫星数目大大减少,导致单系统定位无法获得可靠的定位结果,多系统定位通过增加可见卫星数和改善卫星空间几何结构来提高定位的精度[3]。王阅兵等对于BDS和GPS进行了单点定位的分析,可以得到北斗系统的精密单点定位要低于GPS,但可以满足定位精度为几个厘米的要求[4]。王浩源等对BDS+GALILEO进行了单点定位分析,可以得到双系统比GPS单系统定位精度高[5]。张小红等对GPS/GLONASS组合精密单点定位说明了定位精度和收敛速度较单系统GPS精密单点有显著改善[6]。陈浩等对BDS+GPS组合单点定位研究,可以得出组合系统卫星的定位精度和空间几何分布优于单系统[7]。
国内外学者对GLONASS、GPS多系统融合定位的研究较多,而对BDS与其他系统组合定位的研究却较少。因此,本文从高度截止角为15°、20°、25°、30°、40°的情况下,进行了BDS、BDS/GALILEO、BDS/GPS、BDS/GLONASS和BDS/GALILEO/GLONASS五种模式伪距单点定位解算,并对其定位精度进行了比较。
2 BDS多模融合伪距单点定位解算
BDS时间基准采用北斗时(BDT),BDT以国际单位制(SI)秒(s)为基本单位,无闰秒,以周和周内秒为单位连续计数,但BDT的起算历元为2006-01-01T00:00:00秒(星期日)的协调世界时UTC[8]。GPS时间系统(GPST)属于原子时系统(AIT)[9],但与国际原子时(AIT)具有不同的原点,任一瞬间GPST与AIT间均有一常量偏差,AIT又与UTC有一定关系。GLONASS时间系统(GLONASST)属于UTC时间系统,但是GLONASS控制部分的特性,使GLONASST与俄罗斯维持的协调世界时UTC存在3个小时的整数差,此外它们还存在系统差[10]。GALILEO的时间系统采用GST时(Galileo System Time),GALILEO起算历元为UT1999.8.22(00:00:00),此时的GST比UTC提前 13 s[11]。综上所述,GPS、BDS、GLONASS、GALILEO的时间基准都能和UTC形成一定的联系。将UTC作为中间变量,即可实现不同时间系统的统一,UTC作为中间变量的转换关系如式(1)所示。
(1)
BDS坐标系采用的是2000中国大地坐标系统(CGCS2000),CGCS2000的定义与国际地球参考系统(ITRS)相一致。GPS坐标系统采用美国世界大地坐标系统(WGS84)。GLONASS坐标系统原采用苏联的1985地心坐标系(SGS85)。GALILEO的坐标基准采用GTRF(Galileo Terrestrial Reference Frame)坐标系,但是各自定义的坐标系与实际使用的坐标系必然存在误差[12]。因此,要进行坐标的统一化处理。本文采用七参数布尔沙模型(Bursa Model)对坐标进行统一转换如式(2)[13]:
(2)
式中:X11、Y11和Z11为原始坐标,X1、Y1和Z1为转换后坐标,△X、△Y和△Z是3个平移参数;εx、εy和εz为旋转参数;k为尺度参数。
通过坐标系定义比较,我们可以认为,CGCS2000和WGS84是相容的,在坐标系的实现精度范围内,CGCS2000和WGS84坐标系是一致的。GTRF坐标系精度与CGCS2000坐标系也同一水平,如果对精度要求不高的可以认为WGS-84坐标系、GTRF坐标系和CGCS2000坐标系同属一个坐标系。但是PZ-90和WGS84存在20 m左右的差异,因此采用公式7对PZ-90和WGS84进行坐标系的转换。
3 数据的处理与分析
3.1 数据来源
本实验采用参考站ANMG、CUT0和GMSD点采集的数据,观测时间分别为2016年8月9日0时0分0秒~2016年8月10日0时0分0秒、2016年9月9日0时0分0秒~2016年9月10日0时0分0秒和2016年8月20日0时0分0秒~2016年8月21日0时0分0秒,数据采样间隔都是30 s。本文在卫星截止高度角为15°、20°、25°、30°、40°的情况下,分别对BDS(C)、BDS+GLONASS(CR)组合、BDS+GALILEO(CE)组合、BDS+GPS(CG)组合、BDS+GLONASS+GALILEO(CRE)组合进行卫星可见数、精度因子PDOP均值、单点定位精度、RMS值分析。
3.2 可见卫星数与PDOP值分析
(1)多星融合的卫星数分析
文中对参考站ANMG的观测数据进行统计分析,在同一个时空基准下,不同的高度截止角(分别设10°、15°、20°、25°、30°、40°)下对BDS、BDS/GPS、BDS/GLONASS、BDS/GALILEO、BDS/GALILEO/GLONASS系统的可见卫星数进行统计,在不同的高度截止角下各系统平均观测到的卫星个数的统计如图1所示。
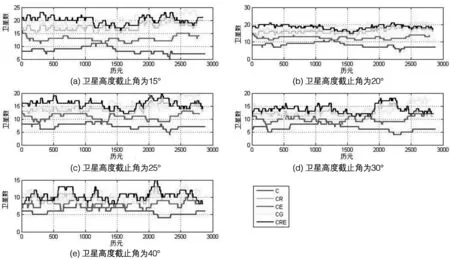
图1 不同系统卫星可见数情况
从图1可知,单系统的卫星可见数较双系统少,而双系统的可见卫星数目较三系统又有了明显减少,其中,BDS/GLONASS/GALILEO(CRE)组合的可见卫星数最多,在截止卫星高度角为15°时,其可见卫星数达16颗~23颗,较双系统和单系统有了很大提高。在截止卫星高度角40°时,BDS/GLONASS/GALILEO(CRE)可见卫星数目依然较多,但在部分时刻可见卫星数为5颗,无法进行三系统伪距单点定位,其次是BDS/GPS(CG)组合,CG组合在所选取的所有截止卫星高度角下均可进行定位。由此可知,在双系统融合中,BDS/GPS的融合性是最好的。BDS对于增加可见卫星数目做的贡献较大,这与卫星数量多有很大关系,随着截止高度角的增加,可见卫星数目呈下降趋势,但是在不同截止卫星高度角下,随着卫星数的增加定位精度越高。
因此,随着卫星截止高度角的增加,卫星可见数在不断减少,在不同的截止高度角下,BDS+GLONASS+GALILEO(CRE)组合定位的卫星可见数都是最多的,除此之外是BDS+GPS(CG)组合、BDS+GALILEO(CE)组合、GLONASS+BDS(CG)组合、BDS(C),同时可见BDS对于卫星可见数的贡献很大。
(2)PDOP值分析
单系统、双系统与三系统卫星在不同高度截止角下的平均PDOP值对比情况如图2所示。从图2可知,在高度截止角小于25°的情况下,三系统卫星融合以后相比单系统和双系统的平均PDOP值明显变小。在高度截止角为30°的情况下,除单系统BDS外,双系统和三系统的平均PDOP值都小于6,且三系统相比双系统波动相对稳定,三系统卫星相比双系统的平均PDOP值小1。但当高度截止角达到40°时,BDS无法满足定位精度的要求,GPS/GLONASS出现进行定位解算的精度最差,BDS/GALILEO也出现了很大的波动,平均PDOP值快达到6,BDS/GPS波动虽然没有BDS/GLONASS和BDS/GALILEO明显,但平均PDOP值快达到6,而三系统卫星融合相比双系统的平均PDOP值小于6,相对比较稳定。因此,高度截止角比较大的情况下,双系统和单系统已经无法满足高精度定位需求,而三系统卫星融合仍然可以得到较低且比较稳定的PDOP值,使定位精度提高。
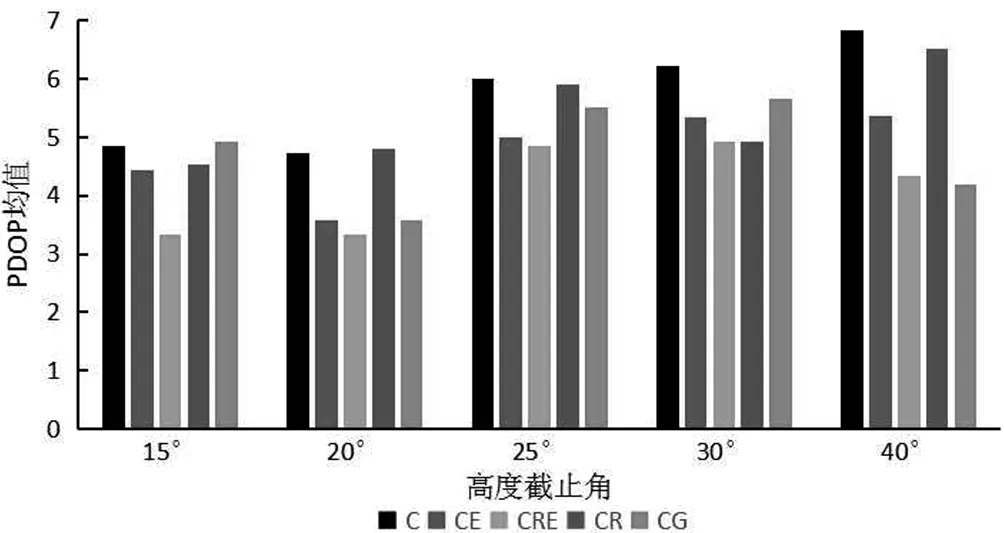
图2 在不同高度截止角下的平均PDOP值
3.3 不同截止卫星高度角度单点定位精度分析
本次研究选择测站截止高度角15°、20°、25°、30°、40°五种情况,对BDS(C)、BDS+GLONASS(CR)组合、BDS+GALILEO(CE)组合、BDS+GALILEO(RE)组合、BDS+GPS(CG)组合、BDS+GLONASS+GALILEO(CRE)组合模式东方向,北方向,天方向的三维坐标偏差变化情况进行分析(图3和图4)。
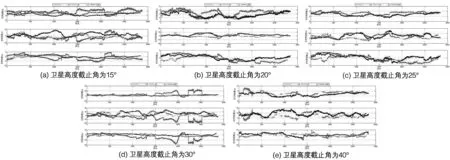
图3 外符合偏离度分析

图4 内符合偏离度均值分析
图3中外符合偏离度分析发现,当高度截止角15°时,东方向、北方向和天方向稳定性最好,三维坐标偏差也最小,但BDS(C)和GLONASS+BDS(CR)组合的稳定性相对较差。图3(b)和图3(c)中发现,在截止高度角20°时各种组合模式稳定性比截止高度角25°好。图3(d)和图3(e)发现组合模式稳定性都较差,波动较大。但是BDS+GLONASS+GALILEO(CRE)组合模式的稳定性最高,但是北方向上也出现了较大的波动,但三维坐标偏差方向上定位精度都比单系统和双系统好。图4中内符合偏离度均值分析发现,当高度截止角15°时,单系统在东方向、北方向和天方向的偏差较多系统最小,但多系统比单系统的定位精度高。当高度截止角25°时,单系统较多系统的偏离度开始逐渐加大,多系统中,双系统也较三系统的偏差开始逐步加大。
实验结果表明,当卫星截止高度角小于25°的情况下,各组合模式的稳定性都是最好的。在截止高度角大于30°的情况下,单系统稳定性较多系统差,而多系统中,BDS+GPS(CG)组合模式的稳定性最差,BDS+GLONASS+GALILEO(CRE)组合模式的稳定性仍然是最高的,这主要是因为在组合模式下BDS+GLONASS+GALILEO(CRE)的空间卫星几何分布较好。
3.4 相同测站不同时段RMS值分析
对ANMG测站截至高度角15°、30°时 10 min、 15 min、 30 min、 1 h、 2 h、 4 h、 6 h和 12 h,8个时段RMS值进行统计如图5所示。
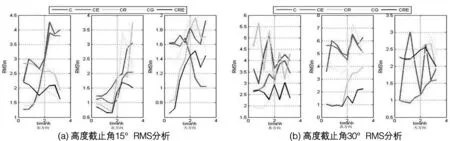
图5 单点定位精度及收敛速度
从图5(a)可看出,在截止高度角15°时,单系统和多系统都能满足定位精度。在多系统中,BDS/GALILEO(CE)的定位精度和收敛速度都要优于BDS/GLONASS(CR)。BDS+GALILEO(CE)、BDS+GPS(CG)、BDS+GLONASS+GALILEO(CRE)定位模式的RMS值较小,且较稳定,其中BDS+GLONASS+GALILEO(CRE)定位可以较快地达到较高精度。在图5(b)可看出,在截止高度角30°时,BDS+GLONASS+GALILEO(CRE)定位模式的RMS值相对较小,且较稳定,GLONASS+BDS(CR)组合的精度较差,而且波动比较大。
在东方向,在截止高度角15°时,BDS(C)、BDS+GALILEO(CE)、BDS+GPS(CG)、BDS+GLONASS(CR)、BDS+GLONASS+GALILEO(CRE)定位模式的RMS值较小,在 2 m~6 m之间,BDS+GLONASS+GALILEO(CRE)的RMS值在 60 min之前为所有系统中最小的。在截止高度角30°时,BDS+GLONASS+GALILEO(CRE)定位模式的RMS值较小,定位稳定,但是BDS+GLONASS(CE)和BDS(C)RMS的值波动较大,定位精度差。在北方向,在截止高度角15°时和截止高度角30°时,BDS+GLONASS+GALILEO(CRE)RMS值最小,为 0.71 m~3 m,BDS+GLONASS(CR)的RMS值最大,且波动较大。在天方向,在截止高度角15°时和截止高度角30°时,BDS+GLONASS(CR)和BDS+GLONASS+GALILEO(CRE)的RMS值最小,且随着时间的增加呈下降趋势GLONASS+BDS(CR)RMS值最大,且波动较大。
3.5 不同测站不同时段RMS值分析
对ANMG、CUT0和GMSD测站截止高度角15°、30°时, 12 h这个时段RMS值进行统计如图6、图7所示。

图6 高度截止角15°不同测站RMS分析
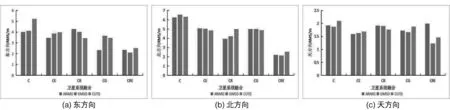
图7 高度截止角30°不同测站RMS分析
由图6可知,截止高度角15°时,在三个方向上3个测站,多系统的定位精度都高于单系统,其中BDS+GLONASS+GALILEO(CRE)是定位精度最稳定的。在东方向上,BDS(C)和BDS+GALILEO(CE)定位中,CUT0测站是定位最优的;BDS+GLONASS(CR)和BDS+GPS(CG)定位中,ANMG测站是定位最优的;BDS+GLONASS+GALILEO(CRE)定位中,GMSD测站是定位最优的。在北方向上,BDS(C)和BDS+GPS(CG)定位中,ANMG测站是定位最优的;BDS+GALILEO(CE)和BDS+GLONASS+GALILEO(CRE)定位中,GMSD测站是定位最优的;BDS+GLONASS(CR)定位中,CUT0测站是定位最优的。在天方向上,BDS+GPS(CG)和BDS+GALILEO(CE)定位中,ANMG测站是定位最优的;BDS+GLONASS(CR)和BDS+GLONASS+GALILEO(CRE)定位中,CUT0测站是定位最优的;BDS(C)定位中,,GMSD测站是定位最优的。
由图7可知,在截止高度角30°时,在三个方向上3个测站,多系统的定位精度都高于单系统,其中BDS+GLONASS+GALILEO(CRE)是定位精度最稳定的。在东方向上,BDS(C)、BDS+GPS(CG)和BDS+GALILEO(CE)定位中,ANMG测站是定位最优的;BDS+GLONASS(CR)定位中,CUT0测站是定位最优的;BDS+GLONASS+GALILEO(CRE)定位中,CUT0测站是定位最优的。在北方向上,BDS(C)和BDS+GLONASS(CR)定位中,ANMG测站是定位最优的;BDS+GPS(CG)和BDS+GALILEO(CE)定位中,GMSD测站是定位最优的;BDS+GLONASS+GALILEO(CRE)定位中,CUT0测站是定位最优的。在天方向上,BDS(C)、BDS+GPS(CG)和BDS+GLONASS+GALILEO(CRE)定位中,GMSD测站是定位最优的;BDS+GALILEO(CE)定位中,ANMG测站是定位最优的;BDS+GLONASS(CR)定位中,GMSD测站是定位最优的。
4 结 语
本文通过BDS融合多系统融合精密单点性能分析,重点研究卫星可见数、精度因子PDOP均值、单点定位精度、RMS值。最终得出以下结论:①系统中随着卫星截止高度角的增加,可见卫星数目减少,定位精度下降。BDS/GLONASS/GALILEO组合系统卫星可见数较双系统和单系统有明显增加且历元可用度最高。②在15°、20°、25°、30°、40°截止高度角下,随着截止卫星高度角的度数的增加,三维坐标偏差逐渐变小小,且定位结果更稳定,且BDS/GLONASS/GALILEO组合系统稳定性最高。③在15°、20°、25°、30°、40°截止高度角下,ANMG、GMSD和CUT0测站RMSE对比分析可知,组合系统较单系统精度高,其中BDS/GLONASS/GALILEO定位精度是最高的。④三系统的PDOP均值都比单系统和双系统的PDOP均值小而且稳定,得到三系统定位的数据精度和质量都比双系统和单系统定位具有一定的优势。
