半主动导引头快速数字化雷达误差提取方法
2020-01-14俞列宸强晶晶贺义海肖玲华
俞列宸, 强晶晶, 贺义海, 肖玲华
(上海无线电设备研究所,上海201109)
0 引言
半主动寻的制导是目前地空导弹中应用较为普遍的一种体制,在战术导弹中占有重要地位,半主动雷达导引头是半主动寻的制导系统中的一个重要部件。随着对数据处理实时性、减少控制环节延迟要求的提高,照射频次快的半主动雷达导引头逐渐受到海军、陆军、空军等不同军种以及国内外各种科研单位的重视[1-3]。
单脉冲比幅和差测角为目前半主动雷达导引头中最为常见的雷达误差提取方法之一,比幅和差测角是通过计算和差差三通道中,回波信号的的幅度比和相位差,判断目标处于雷达导引头天线阵面中的相对位置,来提取雷达误差[3]。
国内外现役的半主动雷达导引头,伴随着数字化导引头技术的发展,全数字化半主动雷达导引头逐渐崭露头角。传统的数字化半主动雷达导引头将接收到的射频信号混频至中频后,对其进行数字化采样,对采样后的数字化信号进行FFT处理,根据和通道FFT处理结果进行恒虚警处理获取目标信号的频率信息,并提取两路差通道中对应频率点上的FFT处理结果实部和虚部。而后,导引头信号处理机可以计算的到三通道在目标频点上的幅度和相位,利用比幅和差测角原理,计算得到相应的雷达误差[2]。
然而,FFT处理和恒虚警检测需要花费较多的时间,导致传统数字化半主动雷达导引头雷达误差提取时间较长,不适用于对实时性要求较高的、照射频次快的间断照射半主动导引头。本文提出的方法,能够有效的解决该问题,参照模拟半主动雷达导引头雷达误差提取方式,利用数字化的方式快速、准确的提取到雷达误差,以满足照射频次较快的间断照射半主动导引头对实时性的要求。
1 单脉冲比幅和差测角算法
比幅和差测角系统如图1所示。单平面内,采用两个具有相同且彼此部分重叠的波束的天线,其方向图如图2所示。天线的接收信号经过和差网络(和差器),和信号和差信号分别进入和通道与差通道。如果目标处于两个波束的交叠轴OA方向,则两波束接收到的信号强度相等;否则,一个波束接收到的信号强度会高于另一个[4]。

图1 比幅和差式测角系统

图2 单平面内天线方向图
设天线方向性函数为F(θ),等信号轴OA的指向为θ0,则波束1、2的方向性函数可分别写成:

式中:θk为θ0与波束最大方向的偏角。
设目标信号偏离等信号轴OA的夹角为θt,则波束1接收到的回波信号为u1=K1F1(θ)=K1F(θk-θt),波束2接收到的回波信号为u2=K2F2(θ)=K2F(θk+θt)。 和信道内和信号为uΣ=u1+u2=K1F(θk-θt)+K2F(θk+θt),差信道内差信号为uΔ=u1-u2=K1F(θk-θt)-K2F(θk+θt)差信号电平表征目标相对等信号轴的偏角大小,差信号与和信号的相位差(同相或反相)表征目标相对于等信号轴偏角的方向。
根据以上分析,比幅和差测角算法,其角度计算公式可以归结为


2 传统数字化半主动雷达导引头雷达误差提取方法
传统数字化半主动雷达导引头雷达误差提取系统框图如图3所示。测角信道设计采用倒置接收方式,天线接收到的射频信号,先经过噪声系数较小的高放对其进行放大,然后根据系统参数将其混频至中频。中频信号进行放大和滤波后,对其进行数字化采样,分别对三通道采样后的数字化信号数字混频至信号处理基带,通过数字滤波和抽取降低其采样率,通过加窗抑制信号中的旁瓣和杂散,对加窗后的信号进行FFT处理,获得三通道的FFT处理结果。对和通道的FFT处理结果进行恒虚警检测,获取目标信号的频率位置,并从两路差通道FFT处理结果中提取相应频率位置上的实部和虚部,按照式(5)计算得到三通道相应频率位置上的幅度和相位[5]。
式中:re和im分别为对应频率点上FFT结果的实部和虚部;Amp为该点的幅度计算值;Phase为该点的相位计算值。
将计算的到的三通道幅度和相位带入式(3)和式(4),即可提取偏航与俯仰通道的雷达误差。

图3 传统数字化半主动雷达导引头雷达误差提取示意图
3 用于半主动雷达导引头的快速数字化雷达误差提取方法
第2章提到的传统数字化半主动雷达导引头雷达误差提取方法,需要对采样后的数字信号进行FFT处理和恒虚警检测,需要占用较长的处理时间,不适用于对实时性要求较高的、照射频次较快的间断照射导引头。本章提出一种快速数字化雷达误差提取方法,参考模拟半主动雷达导引头雷达误差提取方法,利用数字化的计算方式,减少其数字混频等处理过程,同时不需要进行FFT处理和恒虚警检测,采用数字化的方式提取三通道的幅度和相位信息,根据公式(3)和(4)计算得到相应的雷达误差,能有效的节省算法的处理时间。
设和通道、差通道中回波信号的形式分别可以表示为

式中:aΣ(t)、aΔ1(t)、aΔ2(t)分别为三通道数据的幅度;φΣ(t)、φΔ1(t)、φΔ2(t)分别为三通道数据的相位;φ0Σ、φ0Δ1、φ0Δ2分别为三通道的初始相位;且公式(3)中的φ1=φ0Σ-φ0Δ1;式(4)中的φ2=φ0Σ-φ0Δ2;f0为载波频率。
考虑到两路差通道信号表达形式相似,因此仅用式(6)和式(7)进行本文所提方法的推导,为了方便推导,将式(6)和式(7)中和通道和差1通道的初始相位合为通道相位差φ1进行相关的推导,且φ1满足φ1=φ0Σ-φ0Δ1。
数字化系统可以流水的存储单次照射期积累的所有采样点数据,并对和通道和差1通道的数据进行归一化处理,得

将式(9)和(10)相乘,可得

利用积化和差的公式,可得

通过设计合理的低通滤波器,可以有效滤除4倍载频部分的分量,仅保留式(12)中的后半部分,即
根据式(14)可以得到和通道与差1通道之间相位差的余弦值cos[φΔ1(t)-φΣ(t)+φ1]=2×LPF{ss(t)}。数字化系统在获取和通道和差1通道之间相位差余弦值的同时,通过功率合成可以分别得到和通道和差1通道的幅度信息和。根据以上推导,差1通道雷达误差提取值最终可以表示为

上述推导过程,在数字化系统中均可以通过流水处理的方式进行,系统实现框图如图4所示。

图4 用于半主动雷达导引头的快速数字化雷达误差提取方法流程图
4 仿真试验
对以上所述算法进行单平面的仿真验证,仿真所用参数如下:
导引头积累时间:8 ms;
导引头采样率:10 MHz;
导引头中频信号:28.001 MHz;
目标方位位置:100 m;
目标俯仰位置:5 000 m;
导引头天线中心所在方位位置:0 m;
导引头天线中心所在俯仰位置:0 m;
导引头天线尺寸:200 mm;
和差通道初始相位差:0.2π;
通道信噪比:7 dB;
目标散射功率增益积:100 k W;
数字滤波器带宽:200 k Hz;
数字滤波器带外抑制:80 dB。
仿真得到的通道1和通道2的时域波形图如图5所示。

图5 两通道时域波形图
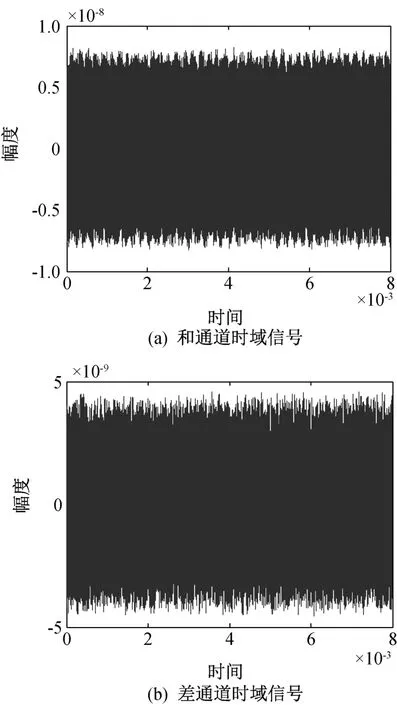
图6 和通道和差通道内信号时域波形图
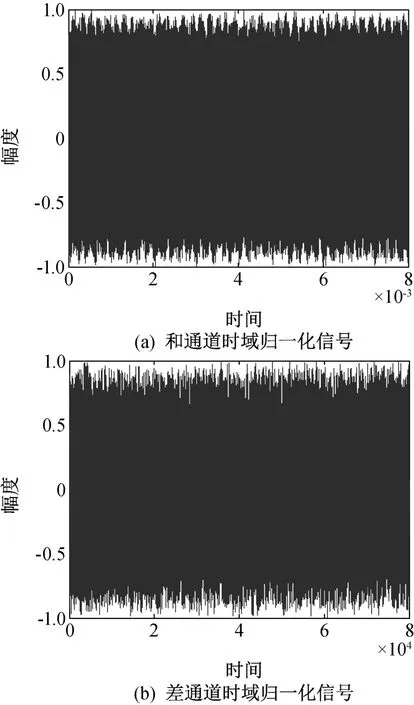
图7 归一化后和通道和差通道波形
将其进行数字和差处理,得到和通道和差通道内信号时域波形图如图6所示。
归一化后的和通道和差通道内信号波形图如图7所示。
通过计算可以得到此时目标偏离天线中心轴线的角度为1.145°,通过本文提出的算法,计算得到雷达误差值为1.022°。
修改仿真时所设置的目标位置,进行多次仿真测试,验证本文所提方法的正确性,仿真测试结果如表1所示。
修改仿真时所设置的通道信噪比,进行多次仿真测试,验证本文所提方法的正确性,仿真测试结果如表2所示。

表1 仿真测试结果

表2 仿真测试结果
5 暗室静态测试
通过仿真测试,验证了本文提出算法的正确性,进一步的,将本文所描述的算法编写成硬件语言,并烧写入Xilinx公司旗下的FPGA(XC5VSX95T),该FPGA芯片包含14万个逻辑单元、块RAM容量高达8 784KB、可用I/O数高达640个,尺寸为35 mm×35 mm。
通过搭建图3和图4所示的回波接收通道,对本文所提算法的正确性、实时性进行验证。
目标偏离天线中心轴方向为[偏航,俯仰]=[-0.65°,0.6°],经过本文所提算法的处理,其雷达误差提取值如图8所示,偏航雷达误差均值为-0.655 66°,俯仰雷达误差均值为0.630 06°。
图9为本文所提算法处理时间的测试结果。其中黑色波门曲线代表照射期同步信号,高电平有效;红色波门曲线代表本文所提算法处理完成标志,高电平有效。图中每两个采样点之间的时间为2 ms。通过分析,本文所提出的算法,在同步波门到来后,(10~12)ms内可以处理完成,并送出雷达误差,即本文所提算法耗时约为(2~4)ms。
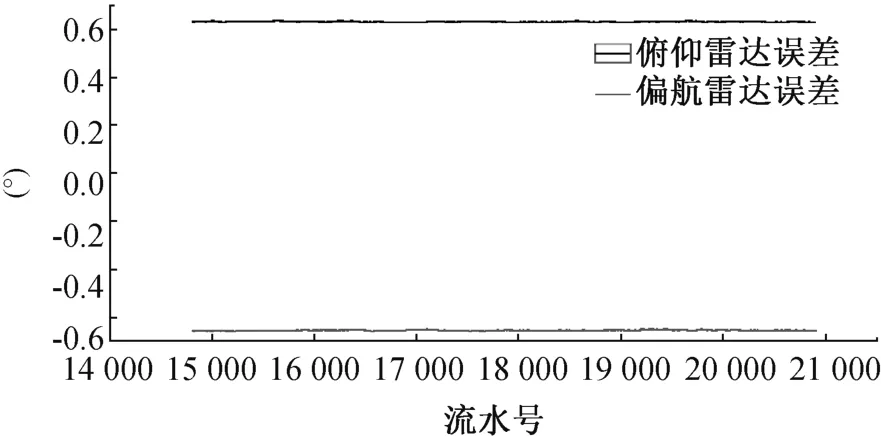
图8 雷达误差提取值

图9 本文所提算法处理时间测试结果
6 结论
本文提出的用于半主动雷达导引头的快速数字化雷达误差提取方法,解决了目前传统数字化半主动雷达导引头雷达误差提取过程复杂、处理时间较长的问题,可以有效的满足照射频次较快的间断照射半主动雷达导引头对实时性的要求,并且雷达误差提取结果与真实值的差异较小。
经过仿真验证和暗室静态测试,验证了本文提出的雷达误差提取方法的正确性、实时性、可行性,可以用于未来战场中的半主动数字雷达导引头。
