轮毂电机驱动汽车直接横摆力矩控制研究
2020-01-11谭洪亮
谭洪亮 曹 也
(1.合肥工业大学 机械工程学院,合肥230009;2.合肥工业大学 汽车与交通工程学院,合肥 230009)
安全、节能和环保是汽车发展的方向和主题,由于过于依赖化学能源,导致环境污染严重,且随着机动车辆数量的增加,交通事故发生率上升.这对汽车的节能、安全提出了更高的要求,也受到企业、高校科研机构的重视[1].轮毂电机驱动电动汽车与传统内燃机汽车和集中式驱动电动汽车相比,具有每个驱动轮输出转矩可独立控制、电机响应快速等优点,这为直接横摆力矩控制的实现提供了更好的基础[2].通过直接控制电机的输出驱动转矩,使车辆产生附加横摆力矩,提高车辆的操纵稳定性.
在车辆动力学控制中,一些问题难以直接用数学模型进行表达.而模糊控制可以很好地解决这一问题,模糊控制[3]具有鲁棒性强、便于操作等优点.基于此,文中设计了一种轮毂电机驱动汽车操纵稳定性控制策略,以车辆横摆角速度和质心侧偏角为控制目标,设计基于模糊控制的直接横摆力矩控制器,得出期望附加横摆力矩;以轮胎利用率最低为目标进行转矩优化分配,最后通过进行双移线工况仿真,验证控制策略的可行性和有效性.
1整车七自由度模型
七自由度整车动力学模型,如图1所示.
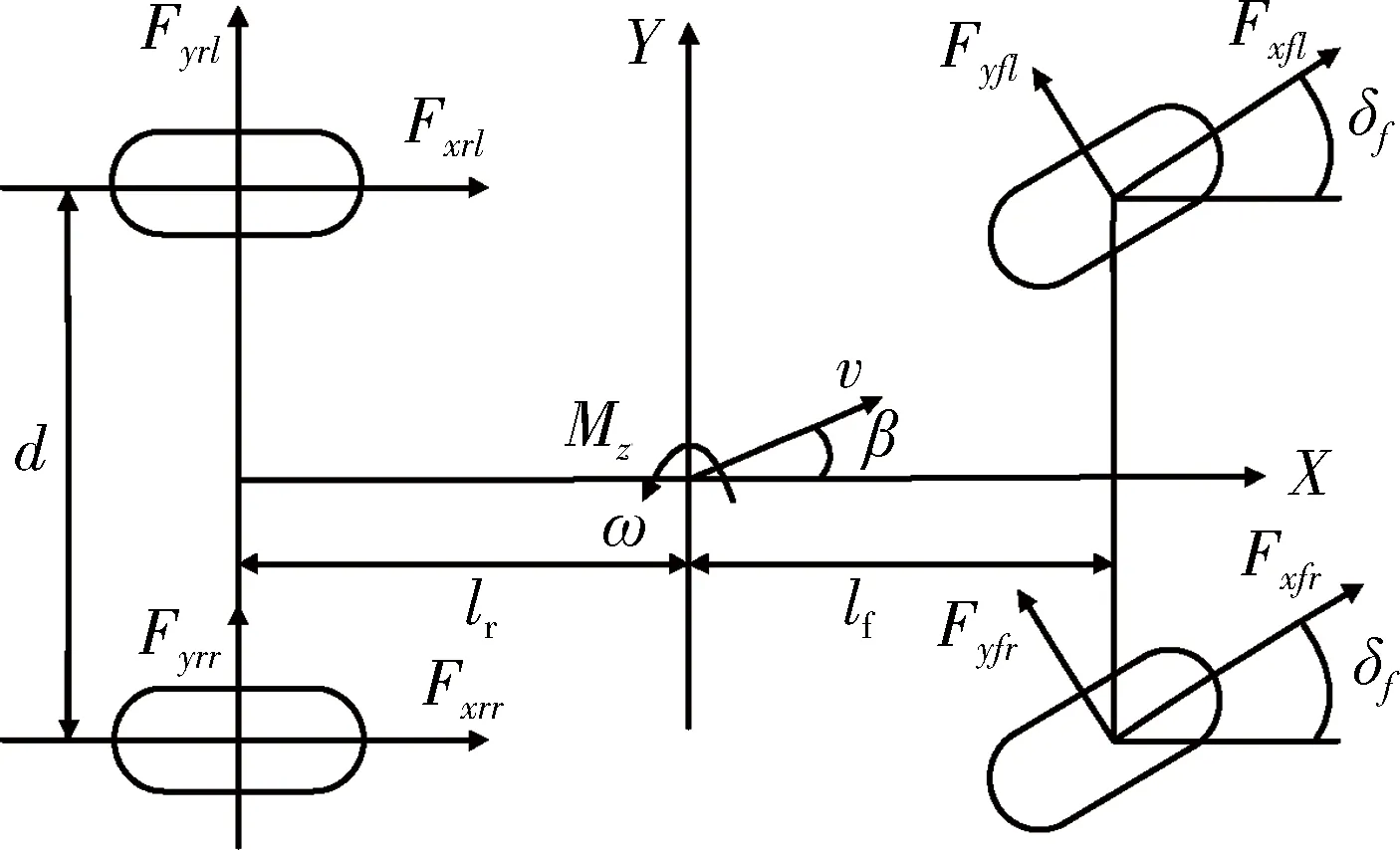
图1 七自由度整车动力学模型
汽车运动方程:
(1)
式中:
F′xfl=Fxflcosδf-Fyflsinδf;
F′yfl=Fxflsinδf+Fyflcosδf;
F′xfr=Fxfrcosδf-Fyfrsinδf;
F′yfr=Fxfrsinδf+Fyfrcosδf.
车轮运动方程:
(2)
车轮滑移率:
Sij=(reγij-vwij)/vwij
(3)
车轮侧偏角:
(4)
车辆质心侧偏角:
β=arctanvy/vx.
(5)
采用Dugoff轮胎模型,公式如下:
(6)
(7)
(8)

(9)
忽略惯性阻力矩和空气升力的作用,得出汽车转弯时各轮胎垂向载荷公式:
(10)
式中:vx为车辆质心处纵向速度;vy为车辆质心处侧向速度;β为质心侧偏角;δf为前轮转角;ωr为横摆角速度;m为整车质量;Fxij、Fyij为车轮纵向力和侧向力;Mz为横摆力矩,Iz为整车绕铅垂轴转动惯量;lf、lr为汽车质心至前、后轴距离;d为前后轮轮距;Jγ为轮胎转动惯量;Ffij为滚动阻力;re为轮胎滚动半径;Tdrl、Tdrr为车轮驱动力矩;γij为车轮转动角速度;αij为轮胎的侧偏角;Sij为轮胎的滑移率;Cxij、Cyij为各个轮胎的纵向和侧向刚度;Fzij为各个轮胎的垂直载荷;μHij为路面最大附着系数;vwij为车轮中心速度;Fzij为四个车轮的垂直载荷,ax、ay分别为汽车的纵向加速度以及侧向加速度;h为汽车质心距地面的高度;ij=fl、fr、rl、rr.
2 横摆力矩控制器设计
文中选用双输入单输出的模糊控制结构,得出为维持车辆稳定需要的附加横摆力矩Mz,模糊控制器的输入为实际横摆角速度与期望横摆角速度的差值Δω和实际质心侧偏角与期望质心侧偏角的差值Δβ,输出为期望附加横摆力矩Mz.以二自由度模型作为参考模型得出质心侧偏角和横摆角速度参考值,其值参考文章[4]得出.
根据前人经验[5],取输入量Δω的基本论域为[-6,6],Δβ的基本论域为[-3,3].输出横摆力矩Mz的论域为[-6,6],输入输出变量的语言为{负大、负中、负小、零、正小、正中、正大},对应的模糊子集为{NB、NM、NS、ZO、PS、PM、PB}.对应的语言规则设定依据为:当横摆角速度差值Δω为负大(NB),质心侧偏角差值Δβ为负大(NB),此时,输出的附加横摆力矩Mz为正大(PB).具体模糊控制规则如表1所示.

表1 模糊控制规则
模糊控制系统采用Mamdani方法,采用“man-mix”方法进行推理,通过重心法去模糊化,最终得到模糊控制器输出Mz.
3 转矩优化分配设计
转矩分配能够将车辆行驶所需的总驱动转矩和期望附加横摆力矩分配给各车轮,转矩分配有多种分配方式[6],本文的优化目标从轮胎利用率方面考虑,应使轮胎利用率尽量减小,保证车辆处于良好的附着状态,提高车辆稳定性.轮胎利用率为:
(11)
忽略轮胎横向力,则可简化为:
(12)
车辆在行驶过程中,通常各轮胎的路面附着系数相同.
则目标函数可简化为:
.
(13)
约束条件设计为:
(14)
式中:Tt为总驱动转矩;Tdimax为单个轮毂电机输出的最大转矩.Ci为各车轮的权重系数.
4 仿真分析
为了验证控制策略的有效性,进行仿真验证.双移线工况能够很好的表现出车辆的操纵稳定性,通过仿真双移线工况,验证所提出控制策略的有效性和可行性.

表2 整车参数
进行车速90 km/h、路面附着系数为0.8时的双移线工况仿真.仿真结果如图2-6所示.

图2 汽车行驶路径
从图2-4可看出,通过对比有控制和无控制时车辆行驶路径、横摆角速度和质心侧偏角状态量跟踪期望值的效果,相比于无控制时,横摆角速度最大偏差减小40%,质心侧偏角最大偏差减小33%,从图5、图6可知,为了使轮胎利用率较低,车辆前后轮转矩存在差异.仿真结果表明设计的直接横摆力矩控制策略能提高车辆的操纵稳定性.

图3 横摆角速度

图4 质心侧偏角

图5 前轮转矩

图6 后轮转矩
5 结 论
1)未对车辆进行稳定性控制时,车辆的行驶轨迹、质心侧偏角和横摆角速度与期望值偏差较大,此时车辆操纵稳定性较差,而进行直接横摆力矩控制时,车辆的行驶轨迹、质心侧偏角和横摆角速度能够较好跟踪期望值.
2)以轮胎利用率最小为目标函数,进行转矩优化分配,为了使总的轮胎利用率较低,前后轮分配转矩不同,且转向行驶时,同轴车轮转矩出现转矩差以产生不同车速和为保持车辆操纵稳定性所需的期望附加横摆力矩.
