火箭橇轨道系统瞬态动力学特性研究
2020-01-10余元元叶俊杰张雨诗赵良玉
余元元,叶俊杰,张雨诗,赵良玉
(1.航宇救生装备有限公司, 湖北 襄阳 441003; 2.北京理工大学 宇航学院, 北京 100081; 3.辽沈工业集团有限公司, 沈阳 110045)
火箭橇是一种以火箭发动机为动力,在地面专用轨道上模拟运动体高速飞行的大型地面试验系统。火箭橇试验既能够克服普通室内试验无法完全得到武器系统动态性能数据的缺陷,又能弥补一般室外飞行试验很难准确获取真实、重复性数据的不足。同时,火箭橇的运载能力、运行速度、加速度、测试环境等均易于控制,可以较好地考核运动体在多种工作状态下的性能。因此,火箭橇试验在导弹设计、航空救生、航天发射等领域得到了广泛应用。
火箭橇沿滑轨高速运动时,受轨道不平顺及滑块与滑轨之间碰撞等因素的影响,其动态载荷呈现出随机性、冲击性以及激励力幅大且激励频带宽等特点[1]。也正因为如此,火箭橇在滑轨上高速运行时会导致轨道系统剧烈振动[2],严重时甚至导致滑轨断裂和试验失败。如美国霍洛曼空军基地的高精度滑橇测试轨道(HHSTT)试验,就在几乎相同的运行速度(1 158 m/s)下分别发生过两次滑轨断裂事故[3],在造成巨大经济损失的同时,还被迫取消了一系列的PAC-3试验安排,对PAC-3的研制进度造成了严重影响。火箭橇轨道系统的动力学特性也由此引起了国内外研究人员的注意。Laird等[4-5]利用hydrocodeCTH软件对超音速条件下运行的火箭橇与轨道之间的撞击过程进行了建模和仿真,获得了与试验结果高度吻合的计算结果。Szmerekovsky等[6-8]对运行在超音速条件下的火箭橇滑轨建立数学模型并进行分析,得出刨削现象对火箭橇滑轨的影响。Yeo等[9]通过建立滑块与滑轨撞击的三维有限元模型,模拟了火箭橇运行速度高达1 500 m/s条件下滑块与滑轨之间的撞击反弹现象,并指出滑轨的损伤程度与火箭橇的运行速度相关。Lamb[10]对HHSTT发生的两次有传感器测量数据记录的轨道断裂事故进行了深入研究,并指出共振是导致滑轨断裂的一个因素。刘洪等[11]建立了火箭橇滑轨中弹性波传播特性数学模型,给出了频率-速度与频率-时间通频带。张雨诗等[12]基于特定的火箭橇滑轨截面建立了滑轨有限元模型并采用数值方法分析其振动特性,得到了可能导致滑轨共振和pinned-pinned振动的火箭橇危险运行速度。
目前,关于火箭橇轨道系统振动特性的研究成果主要通过频域分析的方法得到,火箭橇结构对动载荷的实时响应,尤其是对时变冲击载荷的响应研究尚显不足。为了深入研究火箭橇轨道系统的动力学特性,本文针对具体的轨道截面建立了滑轨的有限元模型,利用生死单元法对其进行瞬态动力学分析,获得了火箭橇轨道系统对冲击动载荷的响应,并给出了火箭橇轨道系统的时域分析结果,为避免火箭橇高速试验时发生滑轨断裂提供了理论参考。
1 火箭橇轨道系统的有限元模型
本文选取HHSTT为研究对象。火箭橇轨道由垂向金属扣件和横向金属扣件固定在分段固接的混凝土地基上。彼此间隔0.15m的一对垂向扣件和横向扣件构成一个扣件组,扣件组以1.25 m的间隔距离沿着轨道均布排列以实现对轨道的固定,火箭橇轨道的具体结构及主要部件的材料参数见参考文献[12]。
本文基于ANSYS软件对火箭橇轨道系统进行有限元建模,图1为火箭橇滑轨瞬态动力学分析模型。考虑到滑轨由周期性扣件支撑,且滑轨具有不可忽略的横截面积,故将其取为采用beam188单元表示的周期性Timoshenko梁模型,以在有限元分析时考虑剪切变形对滑轨的影响。将垂向扣件和横向扣件简化为弹簧单元,仅考虑二者的单轴拉压及其所提供的弹性作用,不考虑弯曲和扭转,故将其选为Combine14单元,横向约束和垂向约束同样如图1所示。同时在弹簧单元一端施加固定约束,另一端与轨道节点相连,而在轨道两侧施加固定约束。
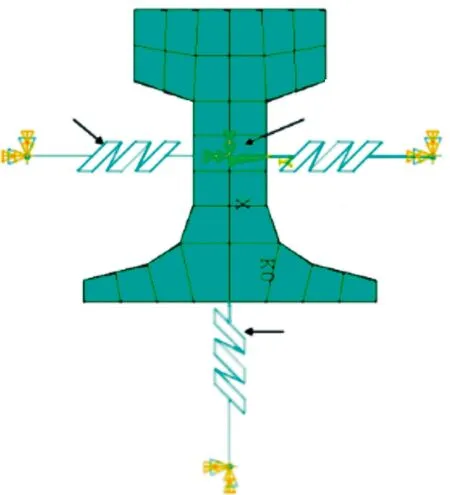
图1 火箭橇滑轨瞬态动力学分析模型
2 瞬态动力学分析方法
2.1 基本原理
瞬态动力学分析(亦称时间历程分析)用于确定结构在承受随时间变化载荷时的动力学响应,是一个时域分析过程。该分析能考虑材料非线性特征的情况下,根据输入的时变载荷最终输出变形体的应力和应变值[13]。瞬态动力学分析通过考虑载荷和时间的相关性凸显惯性力和阻尼的影响,并通过求解被分析对象在时变载荷下的基本运动方程来完成[14]。
瞬态动力学分析的基本运动方程为

(1)

基于有限差分法进行New mark积分,则在从n时刻到n+1时刻的一个时间间隔内,节点加速度、速度和位移的迭代关系如下:
(2)
(3)
其中,α和δ是New mark积分法的两个参数,分别满足
(4)
(5)
式中,γ为阻尼衰减系数,默认值为0.1。
2.2 生死单元法及移动载荷加载方案
生死单元法的核心思想是通过单元“生”和“死”的两种状态来模拟力的实际作用情况。生死单元法可以记录前一施工步中结构的变形状态、内力、位移,并可将前一施工步中的变形、内力应用于后一施工步。通过不断将模型中的单元进行“杀死”(将其刚度矩阵或其他分析特性乘以一个很小的因子)和“出生”(在模型中重新激活),来模拟火箭橇对轨道的撞击过程,并通过瞬态动力学分析模拟轨道系统真实工作情况下的动力学特性。
本文以单滑块火箭橇为研究对象,并将其简化为一个质量单元;忽略火箭橇运行过程中的速度变化,假设移动荷载为固定荷载值的移动荷载列,不考虑轨道不平顺对轨道振动的影响。如图2所示,沿火箭橇运行方向循环加载固定值载荷。在求解过程中,先根据火箭橇的运行速度与冲击频率,确定质量单元的位置与时间步长,并建立所有的质量单元。质量单元通过弹簧单元与滑轨上对应的节点相连。选择TRANS瞬态动力学模块作为求解器,并采用FULL法求解。打开大变形模式,根据运行速度设置时间步长。在分析过程中,首先“杀死”所有质量单元,激活第一个质量单元,进行求解;再次“杀死”所有质量单元,激活第二个质量单元,增加时间步,再进行求解;利用*do…*enddo循环语句不断更新时间和质量单元,完成整个运动过程的仿真。

图2 单滑块火箭橇的动态仿真模型示意图
3 瞬态动力学分析结果
根据参考文献[12]中求解出的危险速度、危险频率,通过设置时间步长和每个步长运行的距离来分析滑轨的动态响应,得到了垂向位移随时间变化曲线、垂向加速度随时间变化曲线、垂向位移随运行速度变化曲线以及垂向加速度随运行速度变化曲线。
3.1 火箭橇运动时滑轨振动位移分析
图3为火箭橇以危险速度616.1 m/s运行,冲击频率为244 Hz时,火箭橇中距滑轨左端125 m、150 m、175 m处的垂直方向位移随时间变化曲线。由三条曲线可以看出,在火箭橇运行到相应的信号接收点之前,此处几乎没有振动。当火箭橇滑行到相应的信号接收点时,此时滑轨由于火箭橇滑块的冲击引起大幅度振动,最大位移为1.6×10-5m左右。随着火箭橇远离,振幅逐渐减弱。从图3可以看出火箭橇滑轨的振幅衰减规律符合常阻尼振动衰减特点。

图3 速度为616.1 m/s垂向位移随时间变化曲线
图4为火箭橇以危险速度616.1 m/s运行,冲击频率为244 Hz时,火箭橇动态仿真中每个时刻滑轨的最大垂向位移随时间变化曲线,可以看出最大垂向位移位于5.59×10-6m与4.53×10-5m间,整个过程中的最大垂向位移为4.53×10-5m,且最大垂向位移呈周期性变化,表明载荷以一定周期作用在滑轨上时会激励出周期性波动。

图4 速度为616.1 m/s最大垂向位移随时间变化曲线
图5为滑轨中垂直方向最大垂向位移出现的位置随时间变化情况,由图5可以看出,最大垂向位移点沿着火箭橇的运行方向移动。
图6和图7分别为火箭橇运行速度为598 m/s和640 m/s,冲击频率为244 Hz时,火箭橇动态仿真中每个时刻滑轨的最大垂向位移随时间变化曲线。由图6可知,运行速度为598 m/s时,最大垂向位移位于4×10-6m与2.1×10-5m之间;由图7可以看出,运行速度为640 m/s时,最大垂向位移位于4.5×10-6m与2.3×10-5m之间。两者都比运行速度为616.1 m/s时的最大振幅4.53×10-5m要小。

图6 速度为598 m/s最大垂向位移随时间变化曲线

图7 速度为640 m/s最大垂向位移随时间变化曲线
火箭橇运行速度为598~640 m/s,冲击频率为244 Hz时,图8为整个运行过程期间滑轨中最大垂向位移随运行速度变化曲线。由图8可以看出,在速度为616.1 m/s时,滑轨中的振幅最大,616.1 m/s是冲击频率为244 Hz时所对应的危险速度,这也证明了参考文献[12]中关于危险速度的结论。

图8 598~640 m/s最大垂向位移随运行速度变化曲线
3.2 火箭橇运动时滑轨振动加速度分析
图9为火箭橇以危险速度616.1 m/s运行,冲击频率为244 Hz时,火箭橇滑轨距滑轨最左端125 m、150 m、175 m处的垂向加速度随时间变化曲线。由三条曲线可以看出,在火箭橇运行到相应的信号接收点之前,此处几乎没有振动。当火箭橇滑行到相应的信号接收点时,此时由于火箭橇的冲击引起大幅度振动,该点加速度最大。随着火箭橇远离,加速度逐渐减弱,振幅衰减规律符合常阻尼振动衰减特点。火箭橇轨道系统在火箭橇滑块冲击下所激励的垂向加速度分析结果和垂向位移分析结果相符合。

图9 速度为616.1 m/s垂向位移随时间变化曲线
图10为火箭橇运行速度为598~640 m/s,冲击频率为244 Hz时,整个滑行过程中滑轨中最大垂向加速度随运行速度变化曲线。

图10 598~640 m/s最大垂向加速度随运行速度变化曲线
由图10可以看出,在运行速度为616.1 m/s时,滑轨中的加速度最大,与垂向位移分析结果相符。
4 结论
1) 火箭橇对滑轨冲击过程中产生的最大垂向位移呈周期性变化,这是因为载荷以一定周期作用在滑轨上时激励出的周期性波动。
2) 考虑火箭橇运行速度在598~640 m/s,仿真得到火箭橇轨道系统产生最大垂向位移的位置和火箭橇运动情况一致,且在不同的运行速度下,滑轨最大垂向位移和最大垂向加速度的数值也不同,并均以危险运行速度616.1 m/s运行时取得最大值。
3) 本文仅考虑了单滑块火箭橇常值速度运行下的情况,后续研究中有必要分析多滑块和时变速度下的滑轨瞬态动力学特性。
4) 本文考虑火箭橇的运行速度在598~640 m/s,在后续分析研究中有必要扩大速度范围,为高速火箭橇试验提供更大范围的参考数据。