半环形翼短距起降无人机设计
2020-01-05岑日进钟小华谢江涛黄衍锦陈中煜
岑日进 钟小华 谢江涛 黄衍锦 陈中煜
(广东白云学院,广东 广州 510450)
0 引言
无人机作业具有成本低、安全风险小、工作效率高等优点,在众多行业中正发挥着越来越重要的作用。根据升力的产生机制,无人机主要分为多旋翼无人机和固定翼无人机2 类。多旋翼无人机具有垂直起降、空中悬停的优点,但因载重量小,续航里程短,导致其不能完成较为繁重的任务。固定翼无人机虽然载重量大、续航里程长,但存在需要跑道来进行起降,并且控制难度较高等问题,限制了其应用的范围[1,6]。该项目设计的无人机,采用半环形翼作为主要升力来源,具有短距起降与载重大的特性,结合飞行控制辅助系统,降低了飞行控制的难度,弥补了已有2 类无人机的不足,预期具有更广泛的应用[3]。
1 无人机整体设计
该项目设计的半环形翼短距起降无人机由机体与飞行控制系统组成。图1 是半环形翼短距起降无人机的三维模型,该无人机采用2 个卡斯特沟槽翼分别置于机身两侧,用于产生无人机的主要升力,2 个电机分别置于半环翼中,在半环形翼外侧拼接一段平直翼用于控制无人机的横滚并增加整体升力,尾翼布局采用双垂尾布局以增加其稳定性,整机长度为12.30 dm,翼展为18.60 dm,机翼总面积为44 dm2,尾力臂为6.78 dm,采用朗宇X2814 三代电机,并搭配好盈天行者50 A 电子调速器、APC 11×5.5 螺旋桨、3S1P 35C 动力电池,总推力约为31.4 N。
2 无人机结构设计
2.1 半环形翼设计
在半环形翼中,动力系统放置在半环翼中,旋转的螺旋桨稳定地引导空气向后通过半环形的通道。半环形翼与电机、螺旋桨的位置关系与气流方向如图2 所示。
通过半环形翼的气流在翼面上产生负压区,机翼上下表面的压力差产生足够的升力。同时螺旋桨的低压侧会吸入各个方向的空气,这时会在机翼表面形成康达效应。从而在半环形翼通道中形成很强的低压区域,并再次产生升力。
2.1.1 半环形翼气动设计
该无人机起飞重量约为2.5 kg,因此在起飞过程中机翼提供的升力Y≥24.5 N,半环翼部分提供约70%的升力,为了满足短距起降的要求,通过计算半环翼部分的翼载荷约Lw=79.5 g/dm2,并结合动力系统的选择和半环形翼与螺旋桨大小的关系,计算得到单个半环形翼的机翼面积为Sc=11.22 dm2,半环形翼的弦长Cc=2.40 dm,并在设计半环翼时确定翼型的固定迎角α=4.2°,环翼的半径r=1.70 dm(几何弦到中心轴的距离)。
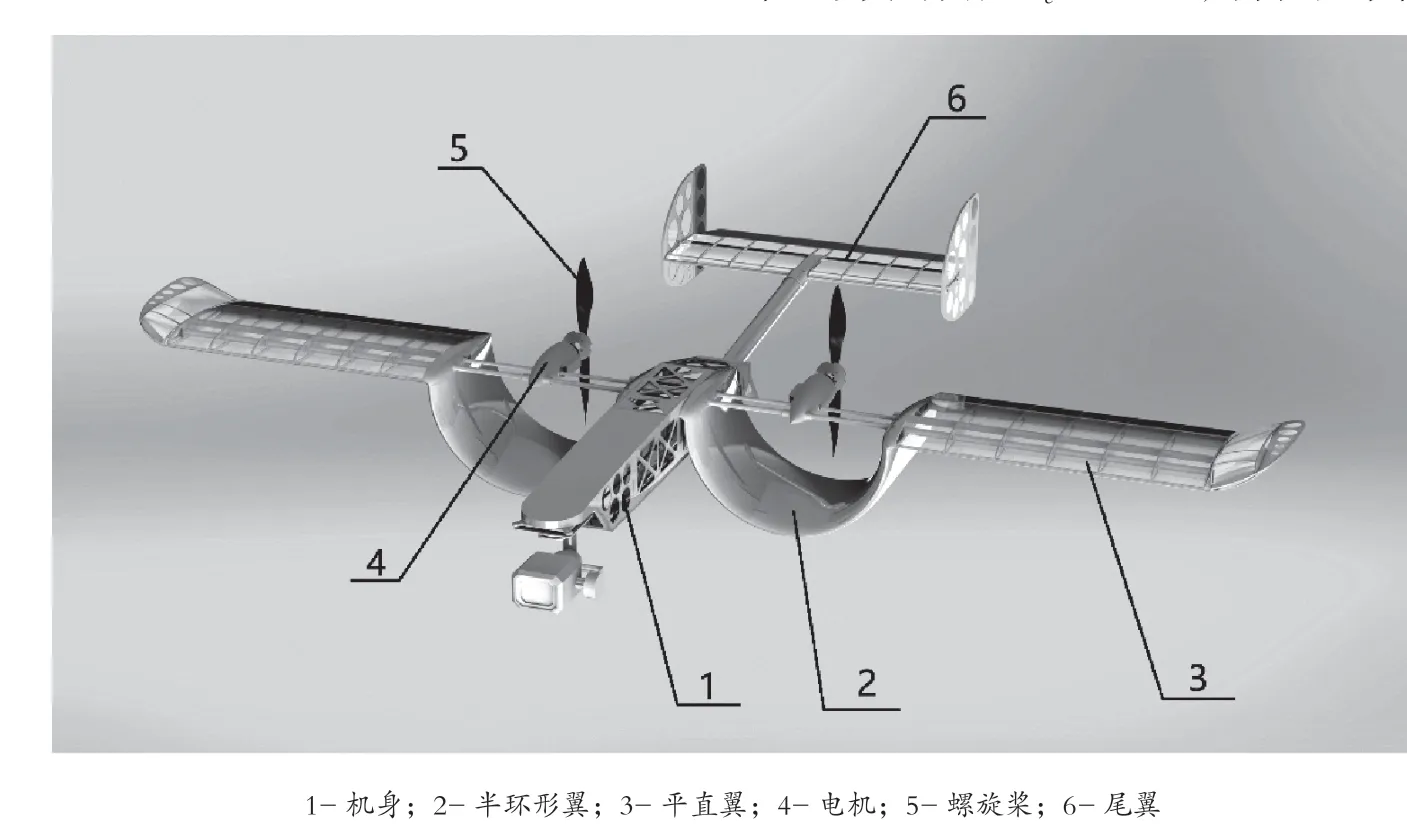
图1 半环形翼短距起降无人机三维模型

图2 半环形翼剖面图
翼型的选择决定了机翼的气动性能,半环形翼翼型的选择主要是考虑关于半环翼的升力要求与制作的难度,翼型要求下表面设计平滑易于制作,且在飞行的工况中有着尽量高的升力系数,为了满足上述要求并平衡机翼产生的空气阻力,通过Profili 翼型库最终选择了5 种合适的平凸翼型,在飞行高度为100 m、通过机翼表面气流为18 m/s、半环形翼弦长Cc=2.40 dm 时,计算得雷诺数Re=293430,5款翼形升阻比(C1/Cd)与迎角(α)的关系如图3 所示,其中①-CLARK-Y、②-ELEK、③-MZ 5411、④-EPPLER 334、⑤-GOE 509。

图3 机翼升阻比随迎角的关系
通过5 款翼型的比较,最终选择MZ 5411 作为该项目的半环形翼的翼型,这款翼型在迎角α=4.2°时,升阻比与升力系数是5 款翼型中最高的,在雷诺数Re=293430 时,升力系数C1=1.0135,升阻比C1/Cd=90.4911。
采用3D 打印技术PLA 材料制作,当无人机飞行时,机翼产生的升力将均匀地分布在机翼上下表面上[4],MZ 5411的迎角α=4.2°时,上表面受吸力,下表面受压力,机翼受力分布如图4 所示,根据压力分布图可以看出,压力主要分布在翼型前缘至55%翼弦处的上表面处。因此在半环翼内部采用斜撑结构,并对主要受力部位的斜撑与上蒙皮的壁厚进行加厚处理。半环翼、电机座、机身之间的连接选用东丽T300 8×6 mm 碳纤维管,加强连接强度。

图4 机翼压力分布图
半环形翼使用SolidWorks Flow Simulation 进行流体力学分析,参数设定为标准大气压,环境温度为20.05 ℃,无人机空速为6 m/s,流过半环形翼表面的空气流速为18 m/s,计算得出单个半环形翼所产生的升力约为8.5 N,满足设计要求。
2.2 平直翼与尾翼设计
平直翼用于控制无人机的横滚并增加整体升力,翼型采用CLARK —Y,弦长与半环形翼部分一致为Cf=2.40 dm,单边翼展为4.52 dm,并加入翼梢小翼消除翼尖气流下洗,减小诱导阻力[5],尾翼布局采用双垂尾布局,在单片垂尾面积有限的情况下可以提供更大的安定面面积,增加整机的稳定性,水平尾翼两侧安装垂直尾翼,使用2 根碳纤维管连接平尾垂尾,增强连接强度与整体抗扭性,尾翼与机身的连接采用T300 16×14 mm 碳纤维管,尾翼参数见表1。
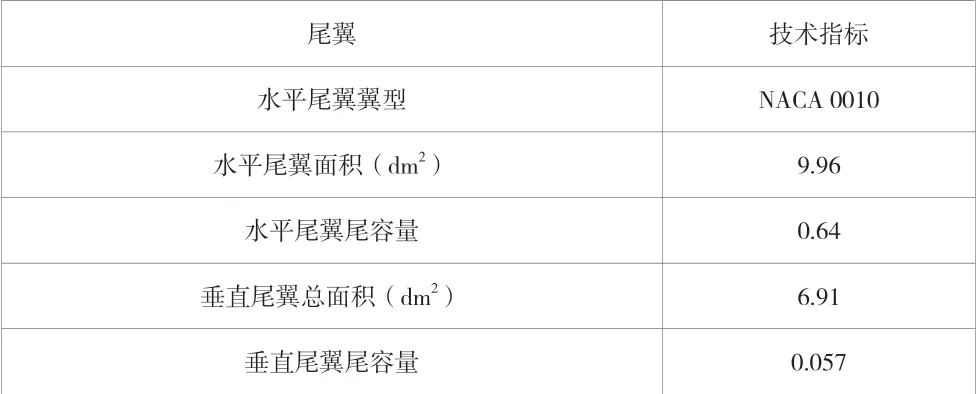
表 1 尾翼参数
3 飞行控制系统
飞行控制系统是无人机的“大脑”,可以稳定无人机的飞行姿态,并能控制无人机自主飞行系统,飞控通过RTK GPS、传感器(陀螺仪、惯性测量单元、加速度传感器、空速管等传感器)感知无人机的位置与姿态的变化,再通过输出PWM 信号控制无人机上的舵机与电子调速器,从而控制无人机的姿态或让无人机执行动作[2],实现无人机的自主姿态控制,配合实时数据传输系统和地面站控制系统,可以实现无人机的自动姿态修正、自动航线飞行、自主定速定高巡航、自动返航。
4 结语
该文设计的半环形翼短距起降无人机可以在复杂的地形短距起降并载重飞行作业,解决了多旋翼无人机载重量小、续航里程不足与固定翼无人机需要跑道起飞降落的缺点。经过测试,该无人机起飞的重量为2.6 kg 时,滑跑距离约为5 m,搭载114 Wh 电池测得续航时间约为40 min,在空旷区域,图传与数传的传输距离约为5 000 m,远程控制模块测试距离达到10 000 m,且自动姿态修正、自动航线飞行、自动返航功能工作正常。在地形复杂难以提供跑道空间且需要载重远程飞行作业的任务中均可以使用该无人机。
