上肢康复机器人研究进展综述
2020-01-03徐东徐晗李益斌张珝李晓龙
徐东 徐晗 李益斌 张珝 李晓龙

摘 要:康复机器人已成为上肢运动功能障碍患者进行康复治疗的重要方法之一。文章通过回顾国内外近年来的研究进展和研究成果,结合康复训练需求,将上肢康复机器人按照使用方式的分类方法,分为末端引导式和外骨骼式两大类,并对其中具有代表性的研究成果从机器人的结构设计、控制设计、康复训练内容、传感检测等方面进行着重介绍,为上肢康复机器人的研究与设计提供参考依据。
关键词:上肢运动功能障碍;康复治疗;康复机器人;外骨骼
中图分类号:TP242;R496 文献标识码:A 文章编号:2096-4706(2020)16-0142-04
Review on Research Progress of Upper Limb Rehabilitation Robot
XU Dong,XU Han,LI Yibin,ZHANG Xu,LI Xiaolong
(Auckland Tongji Rehabilitation Medical Equipment Research Center,Tongji Zhejiang College,Jiaxing 314051,China)
Abstract:Rehabilitation robot has become one of the important methods for rehabilitation treatment of patients with upper limb motor dysfunction. This paper reviews the research progress in recent years at home and abroad and the research results,combined with rehabilitation training needs,the upper limbs rehabilitation robot according to the way of using classification method,divided into two categories:terminal heuristic and exoskeleton,and some representative research results from the structure of the robot design,control design,the rehabilitation training content,sensing detection is introduced,the research and design of the robot for upper limb rehabilitation to provide the reference basis.
Keywords:motor dysfunction of upper limbs;rehabilitation treatment;rehabilitation robot;exoskeleton
0 引 言
腦卒中是一种急性脑血管疾病,严重危害人类健康和生命安全,具有高发病率、高死亡率以及高致残率的特点[1]。根据统计,我国的脑卒中发病率高于全球平均水平,每年约有250万新发脑卒中病例和750万脑卒中幸存者。在脑卒中幸存者中,70%~80%会伴有不同程度的残疾,尤以偏瘫最为常见。据临床研究表明,积极接受有效的康复治疗可使90%的患者重新获得行走和生活自理能力,若不进行康复治疗,该比例仅为6%[2]。因此,对于脑卒中瘫痪患者尽早开展康复训练显得尤为重要,有效的康复训练可以辅助患者最大限度地改善运动功能障碍,减轻后遗症。
对于脑卒中患者,传统康复治疗方法主要是患者定期前往医院或者康复中心,康复治疗师针对其进行“一对一”的手法治疗,康复效果较大程度依赖医师的治疗水平,训练强度难以保证。国内外学者将机器人技术与临床康复医学结合,提出基于康复机器人的辅助训练方案,发挥其优势进行重复性高强度的劳作,减轻医护人员负担,增加患者获得康复治疗的机会,并保证康复训练强度。同时,康复机器人精度高、智能化程度高,能够自动记录训练数据,提供客观、详细的评价参数,辅助医师调整治疗方案,提高康复训练效果,进而进一步调整治疗方案,提升康复训练效果和患者治疗积极性,使患者早日恢复健康水平。
考虑到目前88%的脑卒中幸存者,上肢运动功能在某种程度上受到限制,且与下肢康复相比,上肢复杂的解剖结构使其恢复更加复杂[3]。上肢康复机器人因其完整的上肢运动控制能力,能够完成更加复杂化、精细化的上肢康复训练动作,已逐渐成为康复医学工程领域中的研究热点。奥克兰·同济康复医疗设备研究中心(以下简称“奥同中心”)致力研究国内外康复医疗设备前沿技术,开展上肢康复机器人相关产品的自主研发,本文通过对近些年来国内外上肢康复机器人研究进展的综述,为奥同中心自主研发项目——上肢协调康复机器人的研究与设计,提供前期研究基础。
1 分类
目前上肢康复机器人的分类方法较多,可以按照康复训练内容,分为主动式、被动式和主被动结合式;也可根据其使用形式,分为末端引导式和外骨骼式两类。末端引导式机器人辅助患者康复训练时,患者的手部抓握或绑定于机器人的末端执行器,机器人通过驱动末端执行器从而带动人体手部运动,进而实现上肢各关节的康复训练。外骨骼式机器人常设计为典型的仿生手臂结构形式,可穿戴到人体上肢,对各关节进行精确控制,以实现单关节独立运动和多关节复合运动。本文主要依据使用形式分类,对国内外具有代表性的研究成果进行阐述,并分析上肢康复机器人未来的发展趋势,为上肢康复机器人的研究与设计提供参考依据。
2 研究现状
在美国、日本和欧洲一些国家,因受老龄化影响,其国内的康复机器人产业起步较早,并有部分成熟的研究成果进行了产业化投放市场。我国康复机器人相关研究虽然起步较晚,但随着我国老龄化进程加剧,政府对老年人、残疾人康复产业关注的日益增加,以及机器人技术的蓬勃发展,清华大学、哈尔滨工业大学等科研机构涌现出大量的优秀的研究成果,对于国内康复机器人的研究与产业化具有显著的引导作用。
2.1 末端引导式
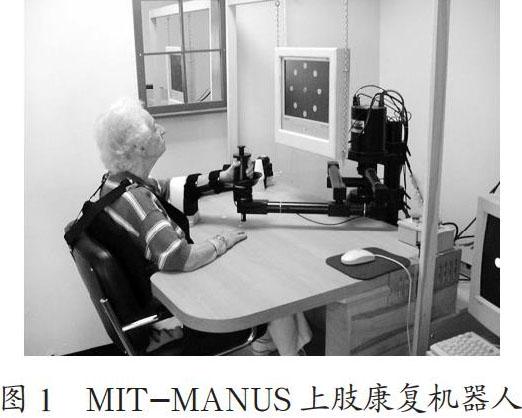
美国麻省理工学院(MIT)Hogan教授开发了第一台上肢康复机器人MIT-MANUS[4],如图1所示。其采用SCARA串联式五连杆结构,末端具有二自由度,可辅助患者进行肩关节、肘关节在水平面内的康复训练。Hogan教授首次提出阻抗控制算法,以提高康复训练过程中人机交互的柔顺性。患者可根据自身病情选择被动训练模式,在机器人的牵引下,以预设轨迹完成被动康复训练,也可通过增加适当的阻尼,辅助患者进行肌力训练。MANUS内置的传感器可实时采集训练过程中的位置、速度、力等各类数据,并将数据传输至上位机界面进行可视化,有效帮助患者和医师进行临床评价。在MANUS的基础上,MIT团队增加了对手腕关节的辅助训练装置,从而实现肩、肘、腕五自由度的康复训练,并开展了初步的临床试验。MIT-MANUS作为上肢康复机器人的鼻祖,从结构形式、控制算法、传感监测等方面,对于后期学者开展的康复机器人研究具有很好的导向作用。
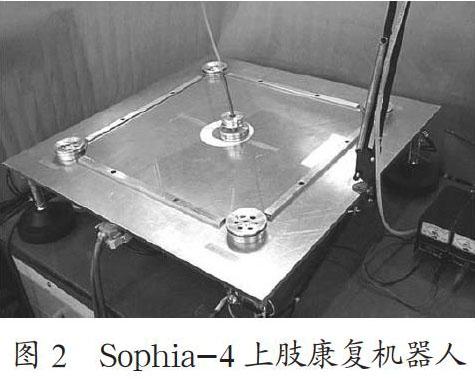
意大利帕多瓦大学研制了上肢康复机器人Sophia系列[5],以多组绳索和滑轮实现肢体末端牵引式康复训练,如图2所示。
其代表性的Sophia-4机器人,共使用了4个电机以分别驱动滑轮转动,4组滑轮缠绕的绳索共同牵引末端执行器,通过手部握持安装于末端执行器处的手柄,实现上肢运动。相比MANUS,Sophia-4可对工作平面进行倾角调整,可以更好地辅助肩关节的屈/伸自由度训练。末端执行器采集的力学信息、位置信息以及滑轮组绳索的张力分别传输至上位控制器和下位控制器实时计算,其数据以及视觉反馈可在PC显示器上实时显示。
清华大学是我国最早开始研究康复机器人的科研机构之一,从2000年开始承担国家“863课题”以来,其一直从事与上肢康复机器人的研究与产业化工作。其中比较有代表性的研究成果为二自由度上肢平面康復机器人[6],如图3所示。其结构形式采用二连杆机构,实现手部末端引导训练,实现肩关节、肘关节的大范围运动,结构设计简单。该系统在康复训练策略上设计有被动模式、助力模式和阻抗模式,并可结合脑电信号实现患者的自主训练。系统内嵌有位置传感器、力传感器,对患者康复训练过程中的运动学信息和力量信息进行采集和处理,实现对患者康复情况的跟踪与评价。
末端引导式机器人侧重关注末端手部的运动轨迹,其传感器往往只用于采集末端手部的位置和力信息,对于上肢其他关节的运动学和力学信息缺乏有效反馈。并且该类机器人常用于辅助患者进行某一平面内的训练,无法较好实现立体空间的关节运动,尤其对于具备多自由度的肩关节,可实现的自由度数量以及关节活动范围均十分有限,从而导致机器人难以模拟上肢日常行为运动轨迹,无法实现复杂的康复训练内容。
2.2 外骨骼式
自2009年开始,苏黎世联邦理工学院研制了ARMin系列上肢骨骼康复机器人[7],ARMin Ⅰ如图4所示。
其最新研制的ARMin Ⅲ,相比ARMin Ⅰ和ARMin Ⅱ自由度更加丰富,并增加了四个被动自由度,增强了关节运动的舒适性和灵活性,较好地适应患者肢体尺寸导致的个体差异。ARMin系列机器人在各关节安装有位置传感器和力/力矩传感器,可对关节运动信息进行采集和记录,患者在训练时可通过PC端界面看到虚拟人物在做同样的动作,并通过任务引导式的游戏提高患者的训练积极性。在控制算法上,研究人员通过阻抗控制和导纳控制的算法设计,提高了人机协作时的柔顺性。
美国特拉华大学Mao等人提出了一种绳索牵引驱动的上肢外骨骼康复机器人CAREX系列[8],如图5所示。该机器人设计有七个电机,可实现肩、肘、腕五自由度运动。CAREX为一种新型的轻质外骨骼,将外骨骼的刚性连接替换为固定在活动肢体上的轻质袖口结构,通过多股绳索多方向联合驱动每个袖口结构,袖口结构再驱动肢体运动。这种多股绳索多方向的驱动方式,较好地解决了单股绳索无法提供推力的问题。与ARMin Ⅲ相比,CAREX的总体重量减轻至后者的十分之一,仅有1.5 kg。
哈尔滨工业大学的陈燕燕设计了一种混联式可调节六自由度外骨骼,适用于坐姿/站姿状态下人体上肢单关节/多关节康复运动训练[9],如图6所示。该机器人设计有一套重力平衡装置,可对机器人系统进行静态和动态部分平衡,降低了关节驱动成本。研究人员引入表面肌电信号(SEMG)来表征患者的主动运动意图,通过神经网络方法对患者的运动趋势进行预判,增强患者康复训练的主动参与性,并以健康人作为受试对象,进行了被动、主动康复训练试验,验证了其设计的基于SEMG和轨迹线性化(TLC)的控制策略具备良好的轨迹跟随性能。
上肢外骨骼康复机器人模拟人体上肢对应关节分布特征布置,这要求人机对应关节的轴线/心在康复训练过程中始终保持对齐或重合。以肩关节为例,人体肩关节的生理位置是由肩锁关节、胸锁关节、肱骨姿态等共同决定,外骨骼机器人的机械轴线较难做到与肩关节轴线/心实时对齐,导致出现人机协作不相容问题[10]。但与牵引式康复机器人相比,外骨骼康复机器人可以实现上肢在立体空间内的训练,可以较好地实现上肢各个关节的运动控制。
目前国内也涌现出一批创新型企业,通过与高校产学研合作和自主研发,推出了一系列的上肢康复机器人产品。上海傅利叶智能科技有限公司研发的ArmMotus M2上肢康复机器人[11],采用二自由度平面引导式结构设计,可为患者提供沉浸式的康复训练体验,提高患者运动的力度、速度、准确度等多维度的训练效果,重塑上肢功能,如图7所示。广州一康医疗设备实业有限公司推出的三维上肢训练与评估系统A6[12],采用七自由度外骨骼式结构设计,除实现常规的被动、助力和主动训练外,还增加了轨迹示教功能,可实时模拟人体上肢运动规律,结合情景互动、训练反馈和评估系统,提高患者康复训练效果,如图8所示。
3 结 论
目前国内外较多的上肢康复机器人仍处于科学研究中,距离临床使用还有较多的难题需要解决。末端引导式康复机器人的结构形式限制了康复训练任务的复杂性,不易实现复杂运动训练,多关节联合训练时无法较好兼顾每个关节。外骨骼康复机器人存在轴线对齐、个体间肢体尺寸差异问题,对于机器人结构设计、控制柔顺性都有较高的要求。
康复训练的目标是帮助患者最大程度地改善功能障碍,提升生活自理能力,回归家庭。在任务引导方面,应更关注日常生活活动的能力要求,设计提高适应性的训练任务;在机器人的结构设计上,应从肢体生理结构出发,符合患者的运动特点、身体特征以及训练空间的要求,并能适应患者间的个体化差异。同时,在机器人控制系统设计中,应加入大量的传感器,采集患者的力学信息、运动学参数、生物电信号等数据,并对数据进行处理、分析,实时获得患者训练过程中的状态变化,自适应调整训练任务,提高人机协作的柔顺性交互。
目前,康复训练呈现出巨大的刚性需求,国家政策的大力支持必将促进康复机器人蓬勃发展,在北京、上海、广州等城市先后涌现出大量康复机器人研发企业,相信不久的将来,康复机器人将成为支撑“健康中国”战略国家“大健康”战略的重要一环,帮助更多的功能患者重获健康。
参考文献:
[1] 王陇德,刘建民,杨弋,等.我国脑卒中防治仍面临巨大挑战——《中国脑卒中防治报告2018》概要 [J].中国循环杂志,2019,34(2):105-119.
[2] 陈茂.运动疗法和针刺治疗在脑卒中后偏瘫康复中的应用 [J].医药卫生(全文版),2016(12):142.
[3] 王博恒.基于ROS的肩关节康复机器人控制系统设计与实现 [D].南京:南京邮电大学,2019:9.
[4] VOLPE B T,KREBS H I,HOGAN N. Is robot-aided sensorimotor training in stroke rehabilitation a realistic option [J].Current opinion in neurology,2001,14(6):745-52.
[5] ROASTI G,ZANOTTO D,SECOLI R,et al. Design and control of two planar cable-driven robots for upper-limb neurorehabilitation [C]//2009 IEEE International Conference on Rehabilitation Robotics. Kyoto,Japan:IEEE,2009.
[6] 胡宇川,季林红.一种偏瘫上肢复合运动的康复训练机器人 [J].机械设计与制造,2004(6):47-49.
[7] NEF T,MIHELJ M,KIEFER G,et al. ARMin-Exoskeleton for Arm Therapy in Stroke Patients [C]//2007 IEEE 10th International Conference on Rehabilitation Robotics. Noordwijk,Netherlands:IEEE,2007.
[8] MAO Y,AGRAWAL S K. Design of a Cable-Driven Arm Exoskeleton (CAREX) for Neural Rehabilitation [J].IEEE Transactions on Robotics,2012,28(4):922-931.
[9] 陳燕燕.上肢外骨骼机器人康复训练系统研究 [D].哈尔滨:哈尔滨工业大学,2017.
[10] 张雷雨,李剑锋,刘钧辉,等.上肢康复外骨骼的设计与人机相容性分析 [J].机械工程学报,2018,54(5):19-28.
[11] 傅利叶智能.ArmMotus? M2上肢康复机器人 [EB/OL].[2020-07-15].https://www.fftai.cn/product/M2.php.
[12] 致郁系绿.广州一康上肢训练与评估系统A6 [EB/OL].[2020-07-15].https://v.qq.com/x/page/n08247vk75j.html.
作者简介:徐东(1990.07—),男,汉族,浙江衢州人,助理研究员,硕士,研究方向:康复机器人及可穿戴智能设备。
