新型移动三维激光扫描技术在盾构管片椭圆度检测中的应用
2020-01-03李军,高涛
李 军,高 涛
(1. 南宁市轨道交通集团有限责任公司运营分公司,广西 南宁 530000;2. 北京城建勘测设计研究院有限责任公司,北京 100101)
随着我国城市不断发展,城市人口不断增加,地面交通影响因素复杂,城市规模不断扩大,交通问题逐渐成为限制城市发展的重要因素。建设城市轨道交通网对于解决越来越严重的交通阻塞问题具有重大意义[1-3]。盾构法是暗挖法施工中的一种全机械化施工方法,其具有掘进速度快,自动化程度高,不影响地面交通与设施等优点,因此在地铁隧道结构建设中得到广泛应用。盾构管片通常采用高强抗渗混凝土,以确保可靠的承载性和防水性能,利用成品管片模具在密封浇灌混凝土后即可成型。在地铁运营以后,由于地质条件差或者周边临近基坑施工等原因,隧道会出现漏水、裂缝、下沉等病害。根据《城市地下空间检测监测技术标准》关于盾构法隧道健康检测的规定,需要对隧道衬砌环直径椭圆度进行检测。传统的椭圆度检测主要有吊铅锤法、全站仪断面法、激光断面仪法等。传统作业方式存在效率低、操作复杂、自动化程度低等缺点,因此无法进行大范围的检测[4-6]。本文创新引入移动三维激光扫描技术,分析移动式三维激光扫描系统的椭圆度检测的基本原理及作业流程,通过工程实例验证该方法在实际应用中的优越性。
1 椭圆度检测常用方法
盾构隧道管片的理论设计为圆形,由于盾构管片在生产、安装、使用过程中均会出现偏差,特别是地铁线路不断运营,管片周围荷载随着环境变化发生改变,导致盾构环片发生变形,为了保障地铁运营的安全,必须对隧道管片的形状的稳定性进行定期的检测[7-9]。椭圆度(也叫不圆度)是定量分析盾构管片整体形变的重要参数,地铁隧道盾构法施工设计、验收和保护相关规范都对盾构管片的椭圆度检测进行了规定和要求,隧道管片椭圆度的关键在于计算隧道管片的椭圆长短半轴。目前现有的检测手段主要有3种,分别为吊铅锤法、全站仪断面法、激光断面仪法。地铁隧道管片椭圆度计算方法为
(1)
式中,T为管片椭圆度;a为椭圆长半轴;b为椭圆短半轴;D为标称直径。
1.1 吊铅锤法
吊铅锤法是通过直接测量盾构管片的椭圆长轴和短轴,从而计算管片的椭圆度[10]。该方法又被称为直接法,采用皮尺与吊铅锤相结合,在隧道管片边缘吊多条铅锤,两侧通过拉皮尺方法找到垂直于各铅锤的测线,通过多次量测找到测线最长位置,找出长半轴a和短半轴b,根据式(1)计算椭圆度。该方法由于通过铅锤定线确定长短轴,前提假定短半轴与铅锤方向平行,但实际情况隧道的长轴并不在水平方向,该方法存在一定狭隘性。
1.2 全站仪断面法
免棱镜全站仪具有精度高、测程远、设备稳定等优势,因此利用免棱镜全站仪对隧道管片进行一定数量测量采集,通过这些测点对隧道环片的整体形状进行拟合处理,获取隧道管片的长短半轴,进而求出管片的椭圆度。但全站仪为单点测量模式,该方式精度高,但采集速度慢,采集的测点密度较小,一般盾构管片的断面测量仅获取15~20点测点,不能完全反映隧道整体形态。
1.3 激光断面仪法
激光断面测量测点密度高、测量速度快,是一种较为先进的隧道形态获取方法[11]。该方法利用高精度快速测距、测角技术,利用极坐标测量与计算机结合,通过单站测量方式快速获取大量隧道结构点云数据,结合专业点云图像处理软件获得环片内壁轮廓,确定管环长短轴的位置并计算其长度,进而得到环片的椭圆度。但该方法只能单站测量,对于隧道长条形特殊结构,其作业效率不能很好地满足业务需求。
2 基于新型移动三维激光扫描系统的隧道管片椭圆度检测
移动激光测量技术是一项迅速发展的高新技术,初期汽车为载体对道路及周边建筑的整体数据采集。随着技术的不断发展,考虑地铁盾构隧道的带状构造、地下作业空间封闭、作业天窗点宝贵的特点[12-13],本文创新引入移动激光扫描技术,以解决传统隧道管片检测中的诸多不足。本文以RMMS-01移动测量系统为例介绍移动测量系统组成,分析椭圆度检测的数据处理方法。
2.1 系统介绍
RMMS-01移动测量系统集成德国Z+F9012激光扫描仪、GNSS/IUM定位定姿系统和DMI(里程计)等多种传感器。通过多种传感器的集成,利用定制的轨道小车和电源为扫描平台,为各传感器统一进行供电。通过置入的微电脑同步控制系统,对各传感器同步控制建立统一系统,实现快速获取连续隧道管片的点云信息。集成后的移动测量系统如图1所示,系统性能参数见表1。
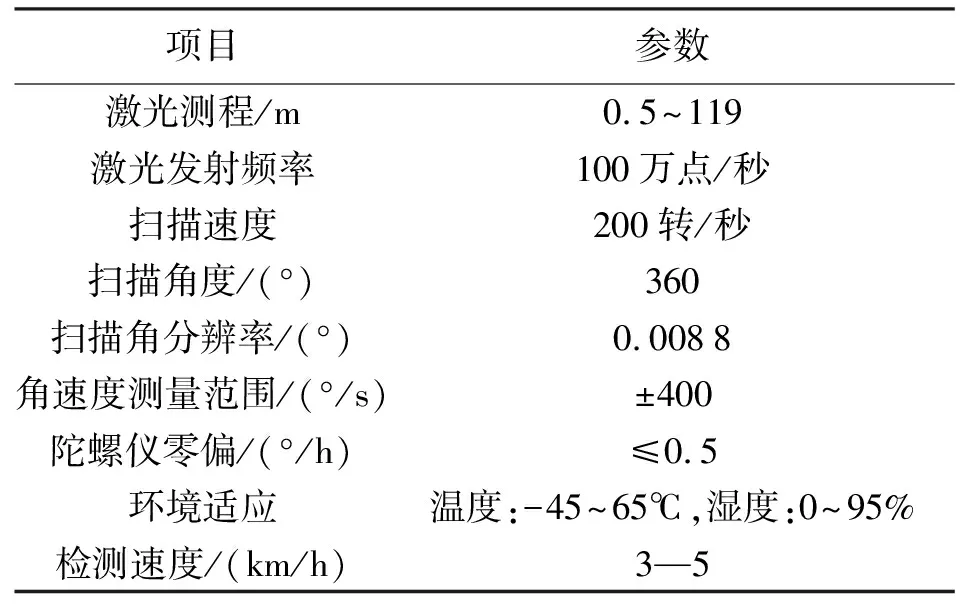
项目参数激光测程/m0.5~119激光发射频率100万点/秒扫描速度200转/秒扫描角度/(°)360扫描角分辨率/(°)0.0088角速度测量范围/(°/s)±400陀螺仪零偏/(°/h)≤0.5环境适应温度:-45~65℃,湿度:0~95%检测速度/(km/h)3—5
2.2 椭圆度检测处理方法
该系统每秒钟可获取几百万个点云数据信息,采集到的点云数据不仅包含隧道内壁的形态信息,由于隧道管片表面安装了诸多配套设备如电灯、电线、螺栓等,因此点云成果中存在大量的噪点[14-16]。为了保证环片椭圆度检测的真实性,必须对噪点进行剔除。椭圆度检测的数据处理过程主要有3个部分:噪点剔除、椭圆拟合、椭圆度计算。
2.2.1 噪点剔除
噪点剔除的方法有很多种,如高斯滤波、半径滤波、双边滤波等。通过一定的点云滤波方法,剔除明显不属于环片壁的点云数据,设定不同的阈值通过不断迭代提高点云的可靠性。然后利用得到的点云数据进行椭圆拟合。
2.2.2 椭圆拟合
本文椭圆拟合基本方法是利用最小二乘法,把去噪后的点云坐标代入椭圆方程(式(2)),由于点云不是严格椭圆会存在偏差,偏差公式为式(3)。
Ax2+B2+Cxy+Dx+Ey+1=0
(2)
(3)
根据式(3)采用最小二乘原理代入断面点云坐标,即可求得椭圆的一般参数(A、B、C、D、E),将椭圆的一般参数代入式(2)得到与断面点云最佳拟合的椭圆。
2.2.3 椭圆度计算
根据椭圆拟合获取椭圆方程,进一步求出椭圆的长短半轴a和b,再利用式(1)即可求出管片椭圆度。
该系统不仅可以快速连续获取大量的隧道点云数据,而且利用本文的椭圆拟合方法进行大量点云迭代计算,可轻松实现隧道椭圆度的逐环快速检测,大大提高了椭圆度的检测速度和准确度。
3 项目案例与分析
3.1 项目概况
我国中部某城市地铁公司要求在该市某条地铁线路两个区间从2018年6月至2019年4月配合运营监测进行为期两次的椭圆度监测。区间1(右线)里程从K20+727.095至K21+504.579,共517个环片;区间2(右线)里程从K14+409.545至K15+169.473,共504个环片。
3.2 成果分析
采用自主研发的自动化点云处理方法将外业获取的数据,利用本文椭圆度监测方法对隧道盾构环片进行逐环检测,并将该环片的拟合椭圆,长短半轴,水平直径,偏转角(长轴与水平方向夹角)、椭圆度等信息进行输出。以区间1里程K20+889.816处109环进行示意说明。图2为环片断面示意图及检测成果表。
将两次采集的数据进行逐环检测,并将两次检测的椭圆度进行叠加分析,对比两次检测椭圆度变化情况,对比分析结果如图3所示,通过对比可知区间1和区间2在两次扫描检测期内环片椭圆度变化不大,该时间段内隧道结构较为稳定,同一区间内椭圆度值较大位置多为隧道的洞口,由此可知隧道洞口结构稳定性不如隧道内部。
4 结 语
本文引入新型移动三维激光扫描技术,分析了该技术在隧道椭圆度检测中的原理与方法,介绍了椭圆度检测的基本流程,通过工程案例进行实际应用。结果表明,该方法检测信息全面,作业效率快,提高了椭圆度检测的可靠性,更加符合未来隧道管片检测的需求。