梳齿往复式杭白菊采摘装置设计与试验
2019-12-31王荣炎郑志安鹿秀风崔宝聪
王荣炎 郑志安 鹿秀风 崔宝聪 高 磊
(1.中国农业大学工学院, 北京 100083; 2.中国农业大学中国农业机械化发展研究中心, 北京 100083;3.山东理工职业学院, 济宁 272000)
0 引言
杭白菊种植模式分为条栽和丛栽,采摘期为10月下旬至11月下旬。杭白菊顶层花与底层花的距离较大,花朵呈自上而下立体式排列,导致采摘条件复杂,杭白菊采摘时要求采后花朵上不带花柄,所以目前为人工分期采摘。杭白菊原产自浙江省桐乡市,2017年,桐乡市杭白菊种植面积达3 200 hm2,约占全国杭白菊总量的25%。随着杭白菊种植面积逐渐增大,劳动力供不应求,采摘成为制约杭白菊产业持续发展的瓶颈[1-2]。
近年来,一些科研机构对菊花采摘机械进行了研究。德国莱布尼兹研究所研制的洋甘菊采摘机[3],利用梳齿与刀具相结合的采摘部件,将花朵采摘后,通过气吸装置输送至收集箱,利用液压系统调节采摘部件工作高度并完成菊花的装卸,其采摘效率高,但采摘的花朵上带有过长花柄,需进一步加工处理;WILLOUGHBY等[4]设计的菊花采摘机,利用曲柄连杆连接两个不同直径的偏心轮,其中设置在外轮上的梳刀组合进行菊花的采摘,辊刷将菊花扫落到传送带上,运送至盛花容器内,该采摘形式较为新颖,但花朵采摘率偏低,仅为75%,梳刀组合缺少控制系统,导致切断位置不统一,所带花柄过多;SEYED等[5]研制了一种梳脱菊花的试验台,当沿花柄方向梳脱菊花,梳齿滚轴转速为500 r/min、对辊轴距为5 mm时,可梳落92%以上的花朵,该试验台验证了梳齿式梳脱菊花的可行性,为菊花采摘方式提供了参考,由于试验台是在理想状态下进行试验,与采摘机实际采收作业存在较大差异;姬长英等[1]设计的手推式杭白菊梳齿采花机,利用安装在链条上的多排梳齿完成杭白菊的采摘和运输,达到了良好的采摘效果,但是机器的通过性较差;成岗等[6]发明了一种菊花采摘装置,通过转动的采摘板将菊花摘下,利用输送带将菊花送至后方的收集箱,结构简单、成本低、采摘效率高;姬长英等[7]设计的梳割气吸一体式贡菊采摘试验样机,采用梳割单元将菊花脱落,通过背负式气吸装置进行菊花收集,但采摘单元的工作范围较小,不能实现整株大部分菊花的采摘,机器通过性有待改善。
综上可知,国外菊花收获机械作业完成后,采后花朵上带有过长花柄,需将含茎、叶和花等收获后的物料进行清选分离[8-10],不适用于我国杭白菊的采摘要求和加工方式。我国杭白菊机械化采摘的研究成果大多停留在专利技术和样机试制阶段。因此,需增大对杭白菊采收机械的研究力度。
本文设计一种梳齿往复式杭白菊采摘装置,通过梳齿将菊花花朵梳落,利用曲柄摇杆机构的急回特性将梳落的花朵送至后方收集盒,辊刷将残留在梳齿间的花朵扫落,采摘单元连续运转完成杭白菊的采收作业,通过大量田间试验,获得采摘装置的最优工作参数,为杭白菊采摘机械化发展提供参考。
1 采摘装置结构与工作原理
1.1 设计要求
采摘装置主要是以合适的速度和采摘轨迹实现杭白菊的采摘,其设计要求如下:①所设计的采摘装置能够保证在合适作业速度下采摘时运行稳定;降低外界环境、机器振动等因素对采摘的影响。②采摘装置的采摘轨迹包络杭白菊花朵的高度差,能够适用于不同植株高度的采摘作业。③所设计的采摘装置具有较好的通过性,不会对杭白菊植株造成碾压伤害。
1.2 采摘装置结构
梳齿往复式杭白菊采摘装置由支架、机架侧板、直流减速电机、链传动机构、主动轴、从动轴、行走单元、收集盒和采摘单元组成(图1)。其中,采用了电压为24 V,功率为300 W,RV40系列的直流减速电机,减速比为30,输出转速范围为0~70 r/min,输出力矩为26.2 N·m。采用型号为JS-30AB 24V PWM的无级调速控制器调节电机转速。采摘单元主要由辊刷和一组偏置曲柄连杆机构组成,曲柄连杆机构是采摘单元的关键工作部件,主要由曲柄、连杆、滑块、滑轨、梳齿安装架和采摘梳齿组成。其中,滑轨为圆柱光轴直线轴承全套滑轨,采用SBR铝托,导轨直径16 mm,长500 mm。主动件曲柄作等速转动,从动件滑块作变速往复运动,连杆作平面复合运动,曲柄连杆机构带动采摘梳齿往复运动,利用曲柄连杆具有的急回特性[11],实现杭白菊的采摘与收集。曲柄安装在主动轴上,连杆两端分别采用轴承与曲柄和滑块铰接,滑块与滑轨配合,沿滑轨做往复直线运动,采用螺栓将滑轨固定在机架两侧板上,滑轨安装高度可调,用于改变曲柄连杆的行程;梳齿安装架与左右两连杆采用螺栓固定,连杆上有多个通孔,可调整梳齿安装架的固定角度;采摘梳齿与梳齿安装板同样采用螺栓固定,方便更换不同齿距的采摘梳齿;机架右侧安装有功率为300 W的直流减速电机,通过无级调速控制器,调节梳齿采摘速度和辊刷转速,可根据实际采摘需要更换辊刷处的链轮,调节传动比;行走单元由4个万向轮组成;收集盒采用螺栓固定在机架内侧。

图1 装置结构图Fig.1 Device structure diagram1.行走轮 2.支架 3.扶手 4.收集盒 5.机架侧板 6.滑轨 7.辊刷 8.采摘梳齿 9.链传动机构 10.300 W直流减速电机 11.滑块 12.连杆 13.从动轴 14.曲柄 15.主动轴 16.梳齿安装架
1.3 工作原理
采摘梳齿是直接与杭白菊植株接触的部件,梳齿的长度和形状等参数对于实际采摘效果有着较大影响[1,12],梳齿长度过长,梳齿易弯曲变形,长度过小,容易漏摘底部花朵,为提高杭白菊采摘率,在保证刚度的前提下,采摘梳齿长度取260 mm,方条形梳齿容易拉断杭白菊枝条,采摘下的杭白菊花朵破损较多,且容易产生堵塞,圆形采花梳齿更容易插入植株枝条缝隙,采摘效果较好,并且端部为圆弧形的梳齿相较于直形梳齿,更易于将花朵向后方收集盒抛送[12-13]。工作时,手推机器匀速前进,电机开启,通过链传动将动力传递给主动轴,曲柄做匀速旋转,滑块做变速往复直线运动,连杆带动采摘梳齿做平面复合运动。采摘梳齿运动到最低点插入杭白菊植株,并向斜上方运动采下菊花,当运动到行程的最高点时,采摘梳齿呈后倾姿态,利用曲柄连杆机构的急回特性,给采摘梳齿一个回程力,杭白菊掉落至机器后方的收集盒,同时,辊刷将梳齿上残留的杭白菊扫入收集盒,实现菊花的连续采摘[14-16]。机架侧板防止采摘下的杭白菊飞溅,根据菊花植株的生长状况,控制手推机器的速度和采摘梳齿往复频率。

图2 杭白菊各部位名称Fig.2 Names of parts of Chrysanthemum morifolium1.花朵 2.花柄 3.花托 4.主枝 5.一级分枝 6.二级分枝
2 力学参数测试
杭白菊植株各部位名称如图2所示。
随机选取20株杭白菊盛开期植株,对其物理特性参数进行测量[8,14,17-18],采用游标卡尺测量各部位直径,采用TA.XTPlus质构仪对各部位进行拉断测试(图3),每组重复5次,试验结果如表1和表2所示。

图3 杭白菊物理力学参数测试Fig.3 Measurement of physical and mechanical parameters of Chrysanthemum morifolium
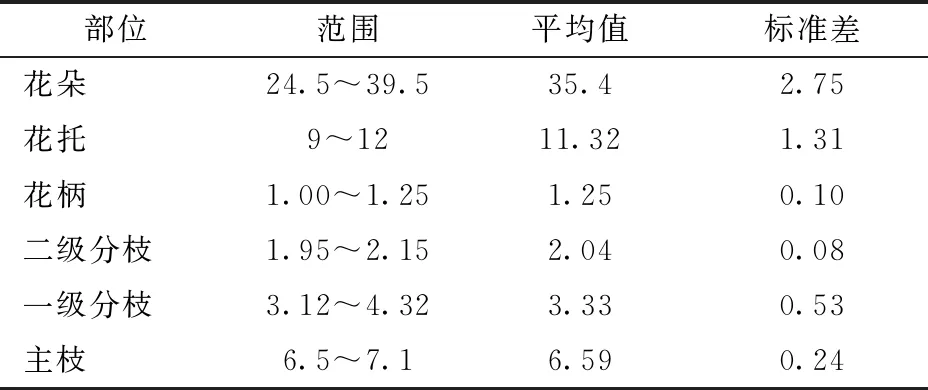
表1 杭白菊各部位直径Tab.1 Diameters of different parts of Chrysanthemum morifoliummm

表2 杭白菊植株拉断力Tab.2 Breaking force of Chrysanthemum morifolium N
采摘梳齿的间距应大于花柄以及各分枝直径,小于花托直径[1,12],根据表1测试结果,确定采摘梳齿间距的范围为4.32~9.00 mm,根据表2测试结果,得出了杭白菊植株各部位的拉断力范围,拉断力由大到小为主枝、一级分枝、二级分枝、花柄,且花柄处的拉断力为2.61~5.59 N,明显小于其它部位拉断力,理论上采摘作业时,最先于花柄处拉断。
3 田间试验
3.1 试验条件与方法
试验地点为河南省新乡市原阳县现代农业研究开发基地,试验时间为2018年12月,试验对象为杭白菊。试验设备包括:梳齿往复式杭白菊采摘装置、测速器、电子秤、花朵收集袋、便携式计算机、秒表、卡尺、扳手等。收获装置外形尺寸(长×宽)为1.2 m×0.6 m,采摘单元升降范围为0.5~1 m,采摘梳齿长度为0.26 m,一排采摘梳齿宽度为0.5 m。该地杭白菊种植模式取决于采摘装置工作幅宽,即杭白菊一垄宽度为0.5 m,杭白菊株高在0.6~0.9 m,分枝高 0.3~0.4 m,根据植株高度,调整采摘单元的高度。在装置制作过程中,将前面两个万向轮改为高地隙行走轮,使机器工作时具有较好的通过性,减小了手推机器行进的难度,同时降低了对杭白菊植株造成碾压伤害,样机试验如图4所示。

图4 收获装置田间试验Fig.4 Field test of harvester
试验时随机选取杭白菊植株,依据试验设计的因素水平组合进行试验。手动匀速推动机器前进,水平移动速度为0.2 m/s。每个因素水平组合下的采摘距离为2 m,以2 m内采摘的杭白菊质量为一组数据。每进行一组试验时,预先清理试验区内自然落在地面上的花朵和残叶,并调整各试验因素水平,稳定后进行杭白菊采摘,行走2 m后关闭直流减速电机。收集采摘下的花朵、枝叶以及采下掉落地面和未进入收集盒的花朵,用电子秤分别称量并记录。
将采摘行程每2 m作为一组采摘数据,测得100朵杭白菊的质量为165 g,将2 m内未采摘的杭白菊数量换算成质量,杭白菊花朵总质量为已采与未采花朵的质量之和。本次试验以采摘率、含杂率、破损率、落地率为评价指标,各指标定义[4-5]为:采摘率为已采花朵与花朵总质量的百分比;含杂率为采摘的枝叶等杂质与包括花朵在内的所有采摘的质量百分比;破损率为破损的花朵质量与已采的花朵的百分比;落地率为采摘过程中未进入收集盒的花朵质量与已采花朵质量的百分比。
3.2 单因素试验与分析
根据梳齿往复式杭白菊采摘装置的采摘原理和结构特点,确定有4个因素可能影响实际采摘效果,分别是梳齿往复频率(往复频率)、梳齿间距、梳齿工作深度以及梳齿工作角度。每个因素取4水平(表3),以15 s内杭白菊脱落的数量为评价指标,分别进行单因素试验,从而分析各因素对采摘效果的影响程度。试验结果如图5所示。

表3 单因素试验因素水平Tab.3 Factors and levels of simulation tests
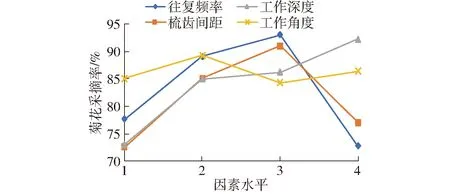
图5 单因素试验结果Fig.5 Single factor test results
由图5分析可得,在所选水平范围内,随着往复频率和梳齿间距的增大,杭白菊脱落数量均呈先上升后下降的趋势;其中,当往复频率为30 r/min时,花朵采摘率为77.7%,当往复频率为60 r/min时,采摘率为72.8%;采花梳齿间距为4 mm时,杭白菊花朵采摘率为72.64%,采花梳齿间距为9.5 mm时,杭白菊花朵采摘率为77.07%,过小会导致堵塞,梳齿间距过大会导致漏摘;梳齿工作深度小于100 mm时,杭白菊花朵采摘率较小,仅为73.08%,采摘率随着梳齿工作深度的增加而增加,但梳齿过长,强度不够;梳齿工作角度的改变对采摘效果无明显影响。最终确定往复频率、梳齿间距和工作深度为影响杭白菊采摘效果的主要因素。
3.3 试验因素和水平
往复频率、梳齿间距和梳齿工作深度分别取3个水平,因素水平如表4所示。

表4 田间试验因素水平Tab.4 Factors and levels of field tests
3.4 正交试验
试验考虑了任意2个因素之间的交互作用[19],选用L27(313)表进行正交试验,试验组数N=27,每组试验重复3次,取3次的平均值作为该组的试验结果,得出每组的采摘率ηc、含杂率ηz、破损率ηp、落地损失率ηl等指标。试验方案与结果如表5所示,试验结果的直观分析如表6所示,各指标的因素交互作用如表7所示,利用软件Design-Expert 8.0.6 对试验结果进行方差分析,结果如表8所示。

表5 试验方案与结果Tab.5 Plan and result of test
3.5 试验结果分析与讨论
3.5.1结果分析
对试验方案中4个评价指标进行逐一分析,对于杭白菊采摘率这一指标,由表8可知,往复频率A、梳齿工作深度C为显著性因素,往复频率与梳齿工作深度的交互作用AC、梳齿间距与梳齿工作深度的交互作用BC为显著性交互作用。显著性大小为A、C、AC、BC。显著性因素的最优水平可通过比较3个水平下的数据均值获得,对于显著的交互作用的最优组合,先计算两因素所有水平组合的均值,再通过比较获得最优的水平组合,根据显著性大小来依次确定各因素的水平。由表6的直观分析可知,因素A的最优水平为2,因素C的最优水平为2。根据表7可知,当C取2,B取1时,均值最大。综上可知,最佳因素水平组合为A2B1C2,此时采摘率为92.47%,但含杂率较高,为11.07%。
对于含杂率这一指标,由表8可知,梳齿工作深度C为唯一的显著性因素。由表6的直观分析可知,因素C的最优水平为1,在因素C为1的前提下,根据表7、8得最佳因素组合为A1B3C1,此时含杂率为7.69%,但采摘率仅为78.82%,落地损失率达到最高值14.49%。
对于破损率这一指标,由表8可知,梳齿工作深度C、往复频率A为显著性因素。显著性大小为C、A。由表6的直观分析可知,因素C和因素A的最优水平均为2,在此前提下,根据表7、8得最佳因素组合为A2B1C2,此时杭白菊破损率为0,达到该指标的理想状态,但杭白菊采摘率较低,为85.83%,含杂率较高,为11.14%。

表6 各指标直观分析Tab.6 Intuitive analysis of each index %
对于落地损失率这一指标,由表8可知,往复频率与梳齿工作深度的交互作用AC为显著性交互作用,往复频率A、梳齿间距B和梳齿工作深度C均为显著性因素。显著性大小为AC、C、A、B。由表6的直观分析可知,因素A和因素C的最优水平均为3,因素B的最优水平为1。综上可知,最佳因素水平组合为A3B1C3,此时落地损失率为1.50%,但采摘率较低,为84.42%,含杂率达到最高值,为19.05%,破损率为6.06%。
结合杭白菊的实际采摘要求,需要综合考虑杭白菊采摘各项指标:优先保证高采摘率的前提下,使杭白菊含杂率、破损率以及落地损失率尽可能低,由此确定3个因素的最优水平组合为A2B1C2。在此因素水平组合下,杭白菊的采摘率为92.47%,含杂率为11.07%,破损率为1.48%,落地损失率为1.41%。
3.5.2讨论
通过实地试验,验证了梳齿往复式杭白菊采摘装置能够达到良好的采摘效果,获得了该装置的最佳工作参数,但是采摘装置需要人工手推前进,不仅费力而且前进速度易受人为因素的影响,统计试验数据时,只记录了位于采摘单元运动范围内的花朵采摘情况,试验误差不可避免,所以需要对采摘装置添加自动控制机器行进的模块,对杭白菊合理密植,使花朵分布位置尽量一致,便于机械采摘,并且保证采摘装置的工作幅宽与杭白菊种植畦宽一致,做到农机农艺相互融合,以实现杭白菊机械化采摘,提高整体经济效益。
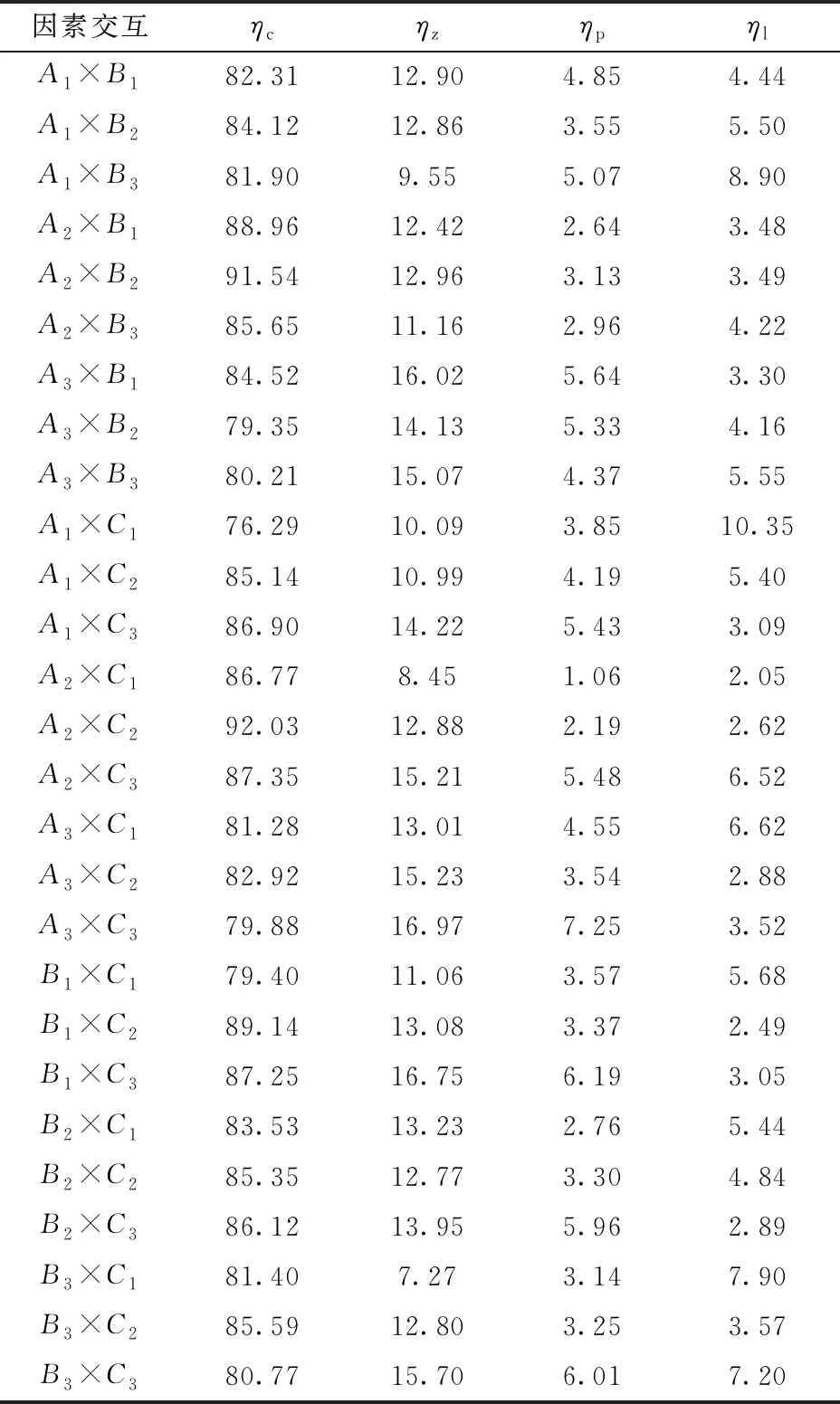
表7 各指标的因素交互作用Tab.7 Interaction of indicators of factors %
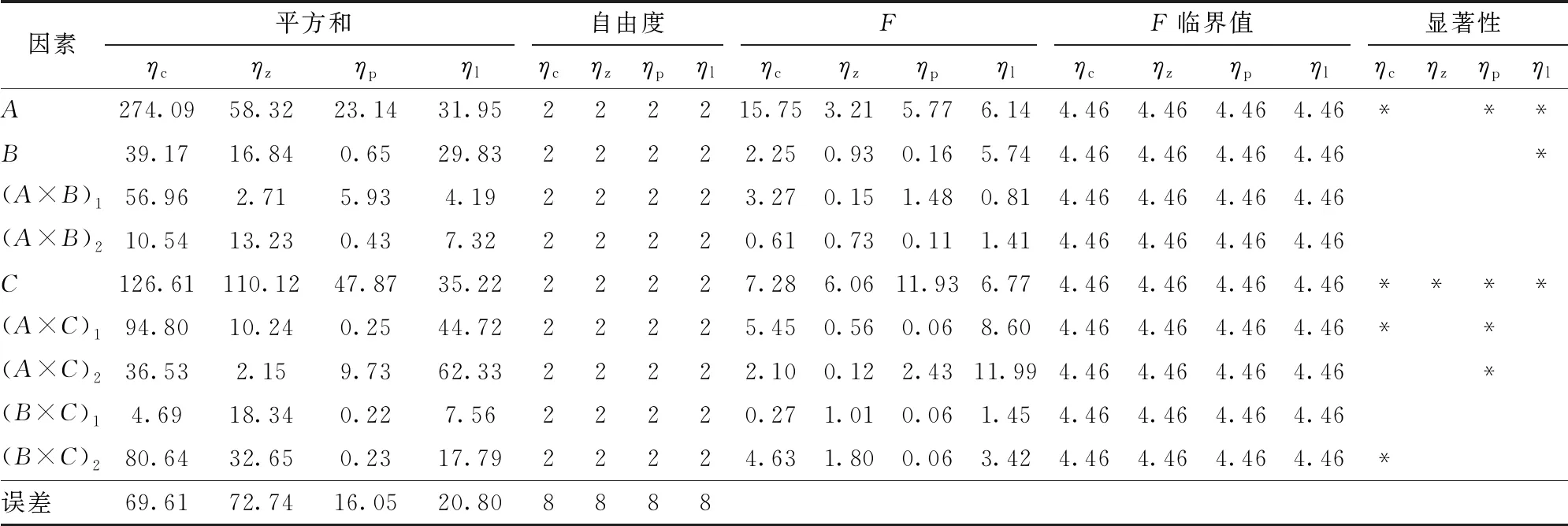
表8 各指标方差分析Tab.8 Variance analysis for each index
注:显著性水平α=0.05。
4 结论
(1)设计了一种梳齿往复式杭白菊采摘装置,采摘单元由辊刷和一组偏置曲柄连杆机构组成,利用梳齿的梳脱、辊刷的清扫和曲柄摇杆机构的急回特性,实现杭白菊的采收作业,搭建了采摘装置样机,机器运行稳定,适用于不同植株高度的采摘作业,机器通过性良好,基本满足设计要求。
(2)为得到该装置的最佳工作参数,在田间分别进行了单因素和正交试验,试验结果表明:在往复频率40 r/min、梳齿间距6.5 mm和梳齿工作深度200 mm的参数组合下,杭白菊的采摘率为92.47%,含杂率为11.07%,破损率为1.48%,落地损失率为1.41%,采摘效果最佳。
