基于RTKLIB和IGS实时数据的GPS干扰效果分析*
2019-12-28曾芳玲欧阳晓凤
张 坤,曾芳玲,欧阳晓凤,赵 元
(国防科技大学电子对抗学院, 合肥 230037)
0 引言
针对传统的大地测量基准参考已不能满足现代高精度长距离定位和信号实时监测的要求[1],常规的GPS信号干扰的模拟仿真未能充分考虑电离层、地形等一系列因素影响的缺陷,文中提出利用GPS精密基线解算软件联合IGS地面跟踪站建立区域性的、与国际地球参考框架ITRF相一致的三维大地坐标参考基准[2],其静态定位精度可达厘米级[3],通过对GPS地面跟踪站连续的观测实现对GPS信号受干扰情况实时准确的分析。
文中主要结合近期美英法对叙利亚首都大马士革进行空袭这一战争实例,分析了空袭期间叙利亚3个典型地面跟踪站的GPS信号变化情况,建立了用实时信噪比、可见卫星数、PDOP和定位误差4个干扰效果评估指标对GPS信号的干扰效果进行评估的体系,解算出了3个地面跟踪站上述4个指标在空袭当天的变化特点,为未来对敌方军事行动的准确判断和实时数据的分析提供了强大真实的数据支持[4]。
1 IGS数据格式及站点分布
IGS(international GNSS service)通过分布于全球的 360 多个 IGS 观测站来监测全球板块运动并实现全球数据的共享,为空间大地测量、地震监测、地壳形变和地球动力学研究提供时间和空间基准[5]。目前IGS跟踪站由单台接收机交换(RINEX)格式生成的日观测和导航数据文件组成,这些数据经UNIX压缩后传送到相应的数据中心[6]。观测值文件包括从00:00:00至23:59:59 GPS时段内所观测的数据。采样率都采用标准的30 s[7]。
RINEX格式命名规则为:SSSSdddf.yyt。其中:SSSS表示测站名;ddd表示年月日(从1月1日起算);f表示一天内的文件序号(时段号0,1等);yy表示年号,如98表示1998,00表示2000等;t表示文件类型,0表示观测值,N表示星历,M 表示气象数据,G表示GLONASS星历,H 表示同步卫星GPS载荷的导航电文[8]。图1是对(.o)文件和(.n)文件经过处理得到的数据。

图1 数据格式
选取叙利亚周边3个跟踪站,如图2所示,其中BSHM站距大马士革最近,约140 km,接收机品牌为JAVAD;DRAG站距大马士革约220 km,接收机品牌为LEICA,RAMO站距大马士革约350 km,接收机品牌为JAVAD。
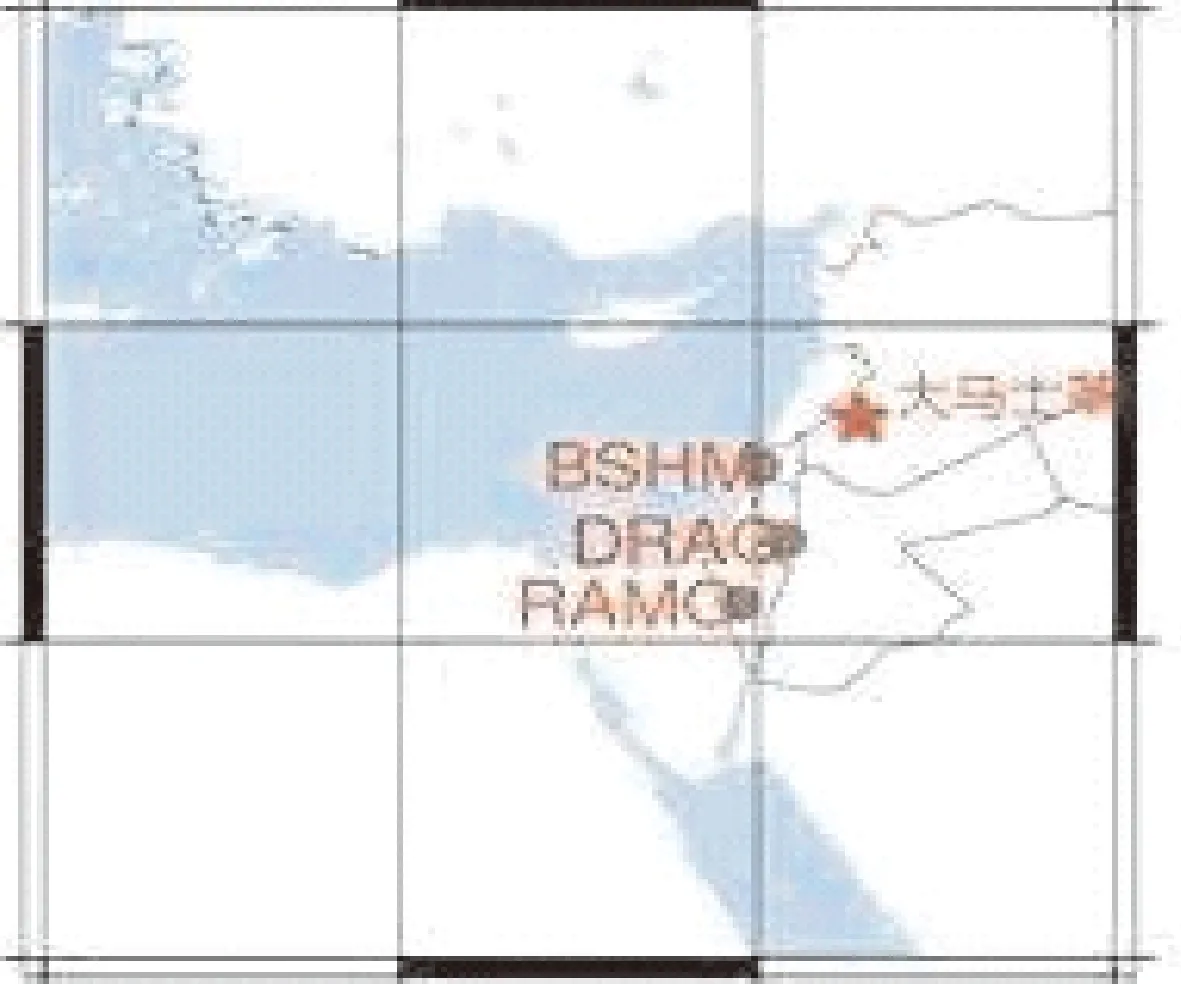
图2 地面站分布
2 RTKLIB软件介绍及应用程序界面
RTKLIB是由日本东京海洋大学的Tomoji Takasu研发的开源软件,是专门为GNSS打造的用于标准或者精密定位数据算法的程序包[9]。该软件可以进行基线解算、实时定位、后处理分析和处理结果图形化;支持多种卫星导航系统系统的定位算法;辅助卫星导航系统进行定位数据处理,例如精密单点定位同,辅助外部通信[10]。
文中主要利用RTKLIB软件中的“rtkplot”和“rtkpost”应用程序对观测数据进行数据处理,其应用程序界面如图3和图4所示。
图3 “rtkplot”界面
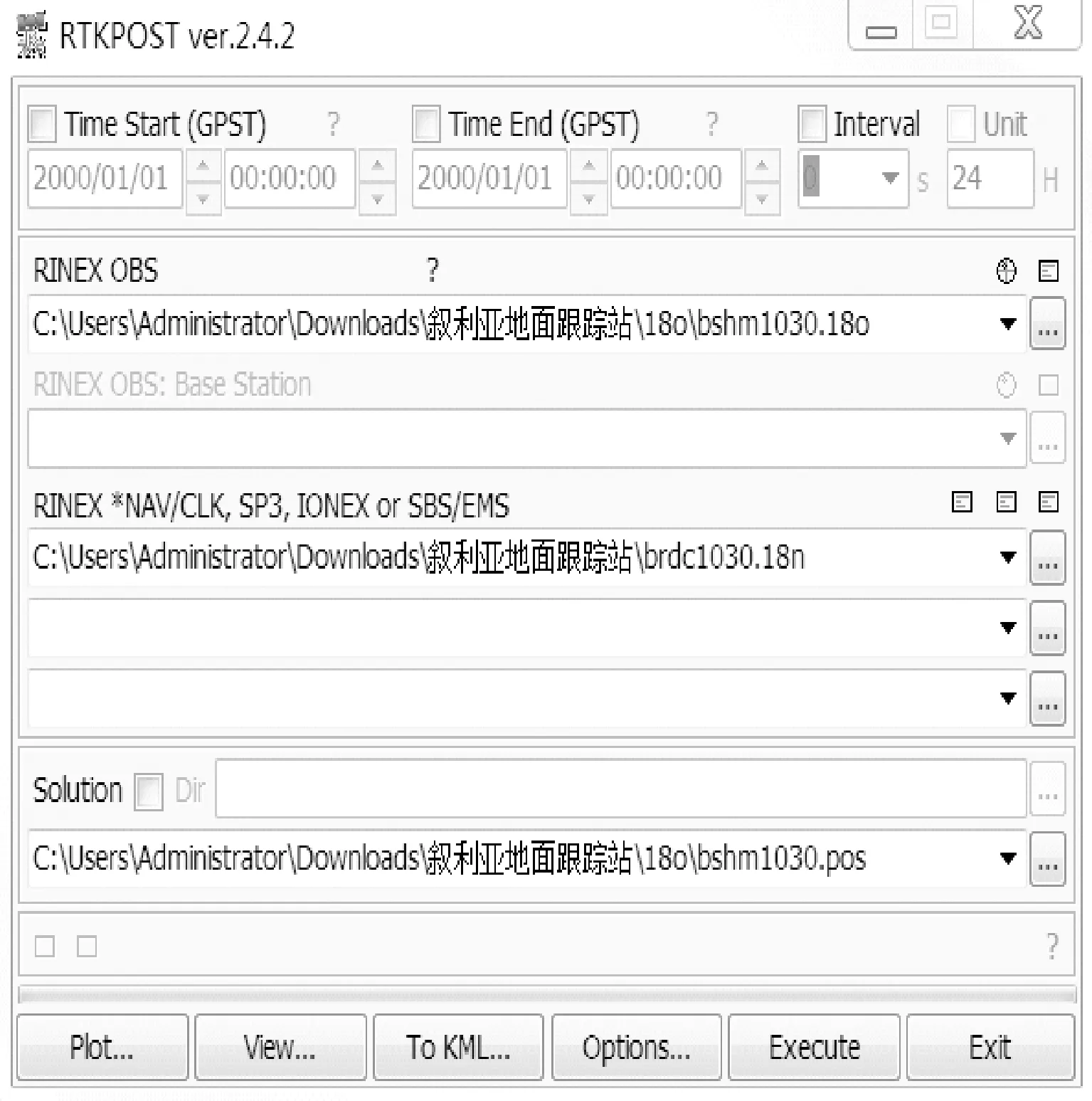
图4 “rtkpost”界面
3 数据处理与分析
对大马士革附近3个地面跟踪站观测数据进行静态精密单点定位分析,目前GPS的服务信号有L1C/A、L1C、L2C、L2P、L5C等,其中L1C/A应用范围最广[11]。下面利用从 IGS 网站下载当天的精密星历和精密钟差及收集到的BSHM、DRAG和RAMO 3个站的数据,将每天的数据切割成1~24 h不同的时段,利用“rtkplot”和“rtkpost”应用程序,得到3个站的信噪比、卫星可见数、PDOP和定位精度等数据。
3.1 信噪比
信噪比可以用来描述地面跟踪站收到卫星信号的清晰程度或者质量好坏,图5、图6、图7是3个地面跟踪站在空袭当天L1C/A信号质量的实时变化情况。
观察上述3个地面站空袭当天信噪比的变化图,可以看出离大马士革最近的BSHM站在UTC3:00和6:00左右图形出现明显的缺口,信噪比有明显的下降;DRAG站和RAMO站在这当天信噪比正常,没有大的异常。
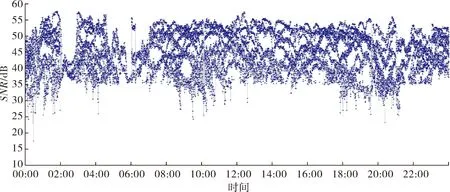
图5 BSHM站信噪比
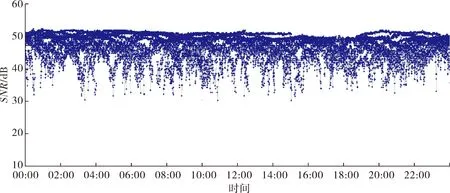
图7 RAMO站信噪比
3.2 可见卫星数
研究卫星可见性,对卫星系统对抗技术的研究有支撑作用。通常当可见卫星数下降,即参与导航定位解算的卫星数目也减少,导航性能就会受到直接影响[12]。图8、图9、图10是3个地面跟踪站在空袭当天可见卫星数的实时变化情况。

图8 BSHM站可见卫星数
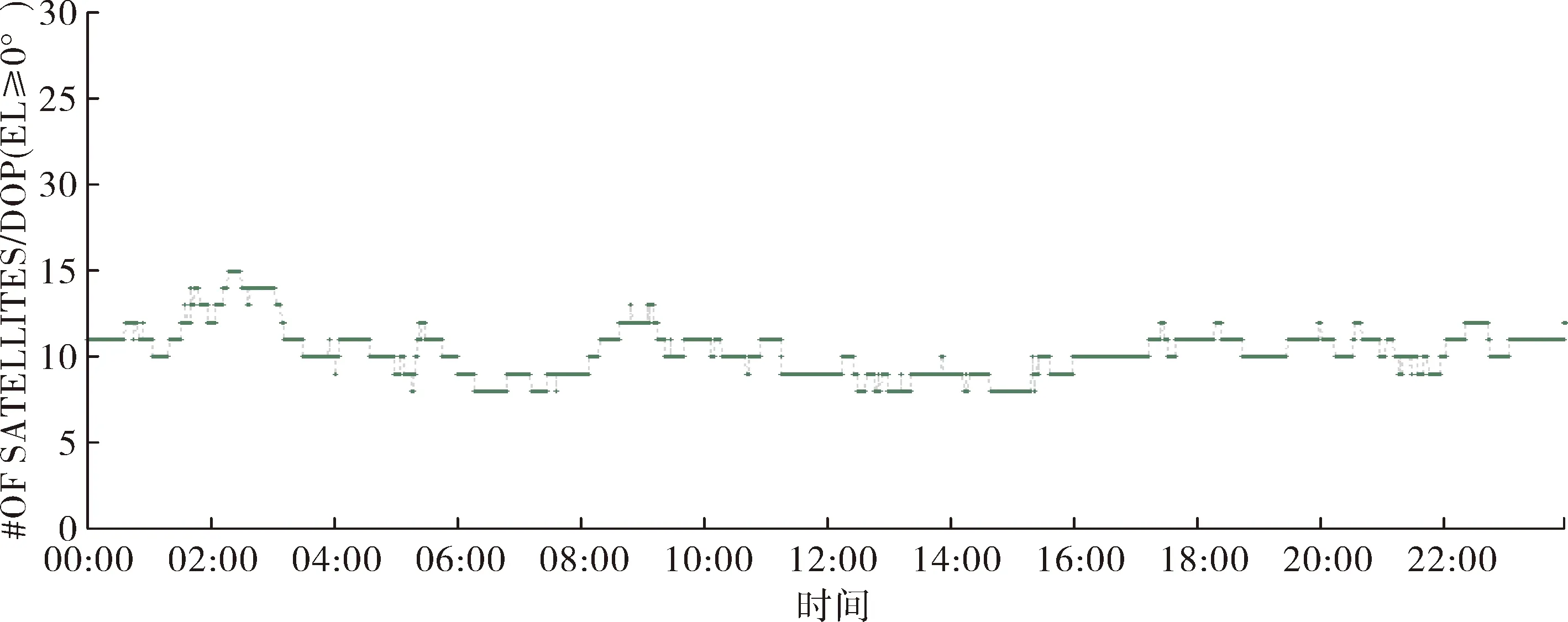
图9 DRAG站可见卫星数
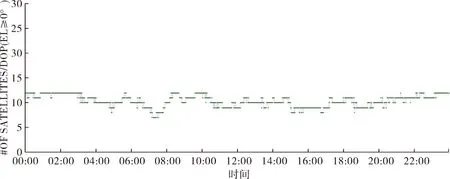
图10 RAMO站可见卫星数
通过对可见卫星数的观测,可知RAMO和DRAG跟踪站在空袭发生前后卫星跟踪正常,满足定位要求,而距离最近的BSHM跟踪站则在3:00和6:00左右,收到卫星数目较少,不能正常定位,此结论也可通过地面跟踪站实时的“skyplot”更加清晰的显示出来,例如图11、图12是BSHM跟踪站两个时刻的卫星跟踪图,在4月13日2:09时刻,共收到G01,G03,G22,G23 4颗卫星,且根据图示下方信噪比及颜色的对应关系,4颗卫星仅有G23 信号良好,其余卫星信号信噪比均不够理想;而在5:50时刻,仅收到G09一颗卫星,显然基本已经造成了地面站对跟踪卫星的完全失锁。
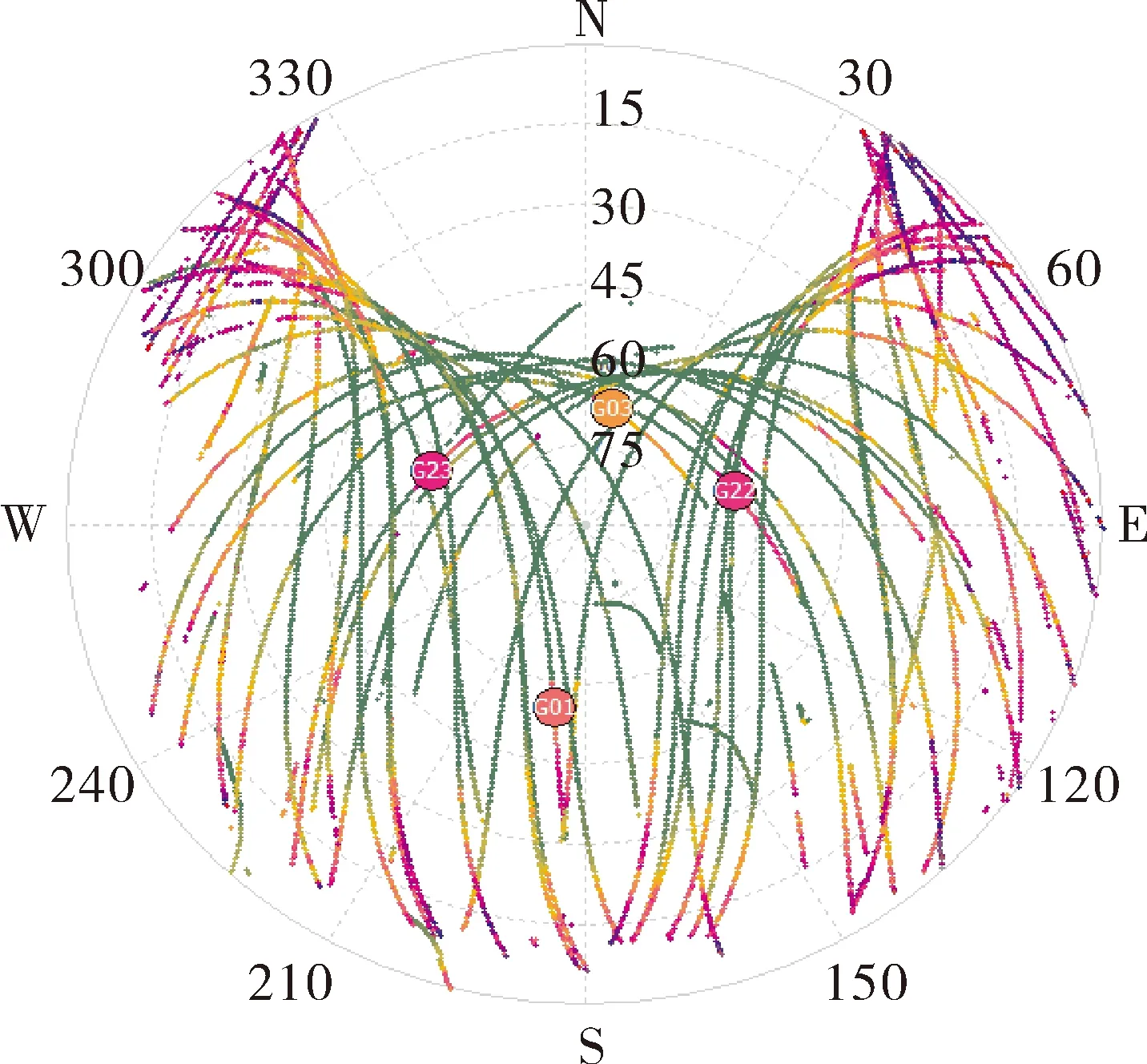
图11 02:09 时刻卫星天空视图
3.3 PDOP
卫星导航系统中,几何因子对接收机定位精度有很大影响,一般用精度因子(PDOP)这个概念来表示误差的放大倍数,其完全取决于可见卫星个数及其相对于接收机的几何分布,而与信号的强弱或接收机的好坏无关[13]。图13、图14、图15是3个地面跟踪站在空袭当天精度因子的实时变化情况。
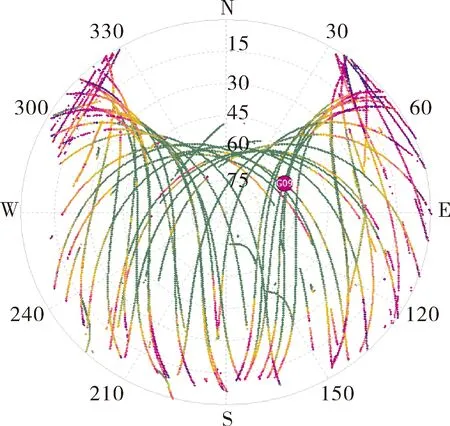
图12 05:50 时刻卫星天空视图
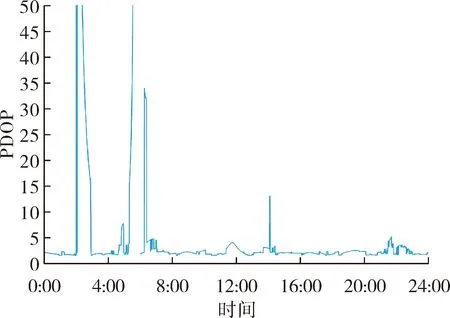
图13 BSHM站PDOP值
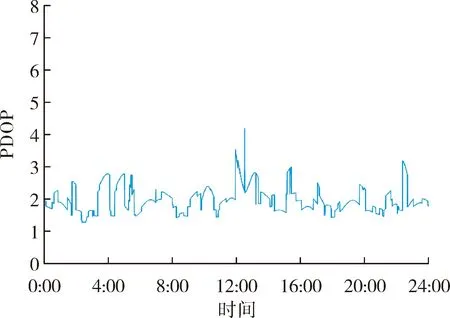
图14 DRAG站PDOP值
通常利用GPS进行精确定位时,PDOP在6以下为最佳[14],表示卫星几何分布较好。通过对3个地面跟踪站PDOP值进行统计画图,可明显看出在RAMO和DRAG两个站的连续跟踪过程中,PDOP值均在6以下,卫星跟踪正常。而BSHM站在13日3:00和6:00左右,PDOP值较大,卫星几何分布较差,即使收到卫星个数超过4颗,也不能实现有效的定位和测量。
3.4 定位误差
定位误差是用户终端最重要的定位指标,能直接反映干扰对信号定位的影响,图16、图17、图18是3个地面跟踪站在空袭当天定位误差的实时变化情况。
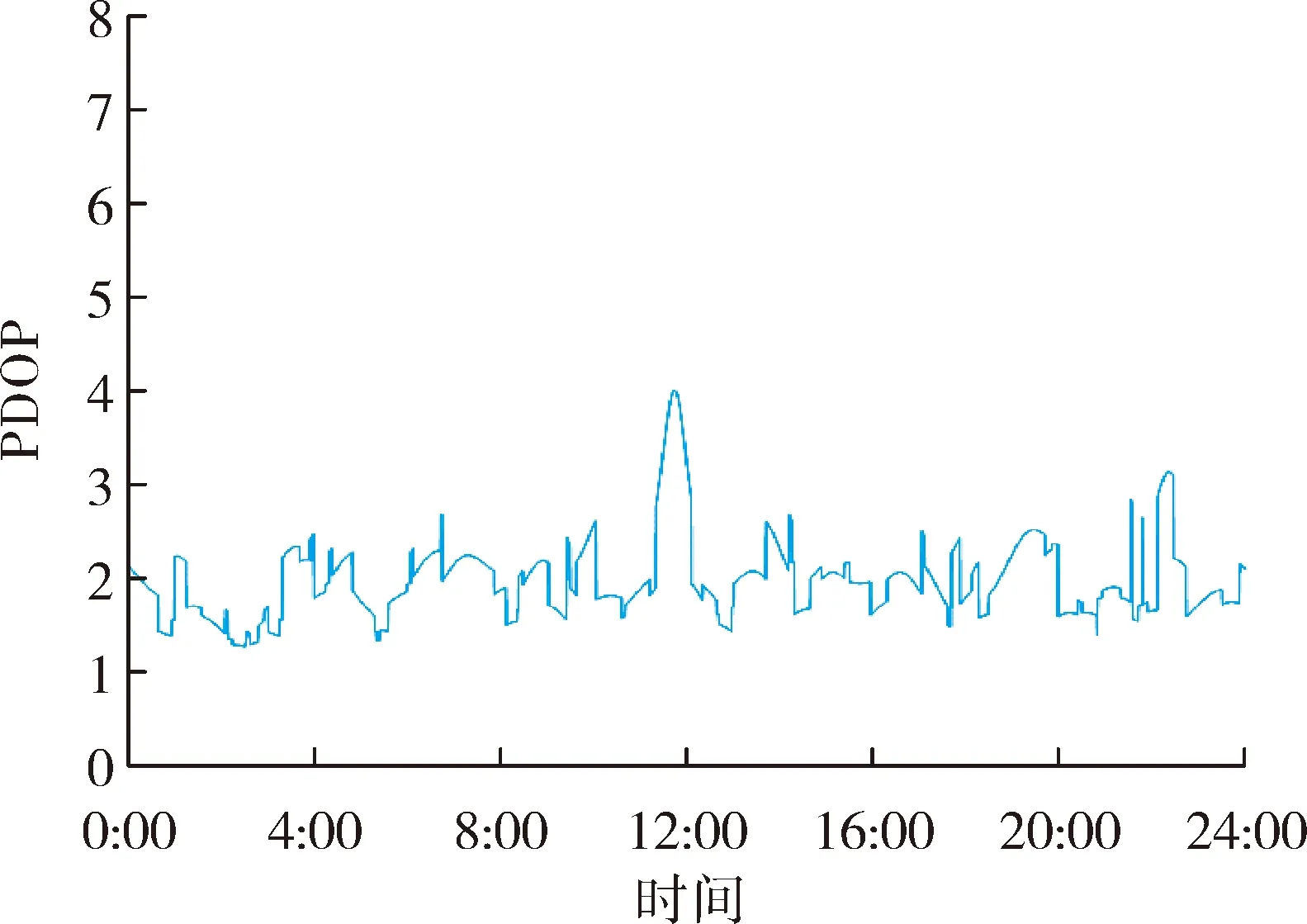
图15 RAMO站PDOP值
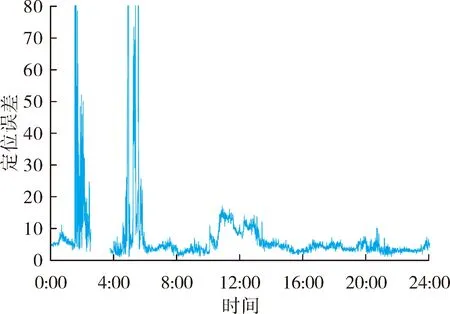
图16 BSHM站实时定位误差

图17 DRAG站实时定位误差

图18 RAMO站实时定位误差
通过对3个地面跟踪站东北天3个坐标系上的定位偏差分析,并计算仿真出其最终造成的空间位置中心偏差,可以看出定位误差较大甚至造成无法定位的是BSHM站在13日3:00和6:00左右两个时间段发生的,这个结果与上述关于信噪比、可见卫星数和PDOP的分析结果完全一致。
由以上对空袭当天叙利亚大马士革附近3个地面跟踪站的信噪比、可见卫星数、PDOP和定位误差结果分析可知,距离大马士革最近的BSHM地面跟踪站收到了较强的干扰,在L1C/A定位中出现了异常;RAMO和DRAG地面跟踪站卫星跟踪基本正常,定位精度满足要求,说明此次英美法联军对叙空袭非美方区域性的关闭在叙卫星导航服务,而且根据已知资料证实了GPS尚不具备在叙利亚如此小区域定点关闭信号的能力。美国此次的军事行动中精确制导武器的应用在局部受到了严重的导航干扰,才导致的GPS信号信噪比降低,定位误差的明显增大,甚至造成一段时间的完全失锁和无法定位。
4 结论
利用IGS实时数据和RTKLIB分析软件对空袭期间叙利亚大马士革附近3个地面跟踪站GPS信号变化情况进行分析和处理,发现在空袭当天有两个时间段GPS信号受到了严重的干扰,导致信噪比降低、可见卫星数减少、PDOP增大、定位误差急剧变大,且证实了空袭过程非美国对叙利亚的GPS服务进行区域性的停用。通过此真实案例数据的研究,证实了以信噪比、可见卫星数、PDOP和定位误差作为GPS信号干扰效果评估体系的可行性,以及基于RTKLIB分析软件和IGS实时数据对干扰效果评估方法的合理性。