一种新型旱地洋葱插秧机的设计
2019-12-27崔有正张洪军张春宇祖新鹏李志钊
崔有正,张洪军,尹 涛,张春宇,祖新鹏,李志钊
(1.齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔161006;2.岭南师范学院 机电工程学院,广东 湛江524048)
洋葱原产自与中亚或西亚[1],已经成为世界各地的主要食材。洋葱是中国、韩国、俄罗斯等国家的主要蔬菜之一。日本早期对移植机械研究的重视,以及早期国家对移栽机发展的重视,全国的98%都以应用机械移栽方式[2]。在一个人口较少的国家,其移植技术主要是单线操作,精密化、专用性等研究方向为主[3]。我国通过对日本移栽技术的消化和吸收,移栽技术有了很大的改进,不仅可以解决标准育种的问题,而且大大降低了成本。但是在分秧、送秧、移栽等方面还存在一定的缺陷,进一步提高工作化装置的自动化程度,实现如自动更换秧苗盘及故障自动停机等的自主机械是目前的研究方向。多功能移栽机具有一系列优点,虽然在推广应用中存在一些限制性因素,但从目前农业科技发展的各个方面来看,移栽机的多功能性和移栽机与旱地移栽机的集成都是可以实现的。我国的市场形势和要求,使农作物生产更加科学化和减少。要少投资增产,实现农业可持续发展的目标,有效利用各种农业资源,保护生态环境。
1 洋葱插秧机总体方案设计
主要功能:对于我国北方地区,大面积种植洋葱,为此洋葱机械的主要功能有以下几点:实现机构自行破膜;实现机构自行下苗;实现机构自行仿形移栽[4]。洋葱插秧机主要包括万向联轴器、鸭嘴机构、平地轮、送秧机构、栽植机构等许多机构组成。洋葱移栽机功能的实现是由许多机构共同满足运动和功能来完成的。分插机构,它是移栽机的主要的工作部分,由集秧装置、动力和控制机构组成。根据一定轨迹从秧盘拿取一定数量的苗并插入到地中。然后循环返回到原始位置,并开始循环。
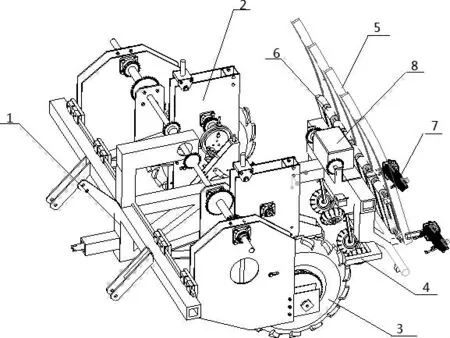
图1 洋葱移栽机主要结构平面图
洋葱移栽机的工作原理是以拖拉机为动力输出的来源。动力输出连接到万向节和变速箱。万向节通过主轴到鸭嘴机构2、8 方向、输秧机构5 和通过变速箱到移栽机构7,完成了各种机械结构的洋葱移栽全过程。具体的动力传动是齿轮箱通过锥齿轮传动减速,改变内部的方向。在曲轴机构中,功率传递到阀瓣,使板在周围和周围移动,并完成左右幼苗的运动。移栽机制通过链路传递,移栽机制部分是两组刨坑和移栽组。该运动是由鸭嘴机构完成的,然后将移植的机制带到已被刨出的坑内,并完成移栽操作。
2 各主要部分的设计
2.1 移栽机传动部分的设计
查阅参考文献[5]对洋葱移栽机进行受力估算,所需的牵引力大约是4000N。转速的计算,变速箱输出的转速在8-16r/s,减速箱的变速比是1:1,则所需拖拉机的转速为2-4r/s,即240~480r/min。第一个传动轴的轴向直径为30mm,材料为45 钢,淬火和回火。链轮的旗子宽度为25mm。此链轮的材料选用45钢淬火处理制作,轮齿的数量为24,传动链选择相同大小的传动链。传动轴上链轮的数量为4,在轴上放置的键为4。移栽机的宽度为210cm,轴的两头由轴承进行支撑,轴承座作为支撑夹具,第一链轮处于轴的边缘10cm 处。链轮的位置依次处于34cm、44cm、58cm 和82cm 处。整个轴的长度是90cm。
2.2 鸭嘴机构的设计
插秧机通过联轴器的传动和驱动链旋转驱动曲柄,曲柄可以驱动摆杆通过槽往复摆动杆实现鸭嘴的操作。机构尖部的运动是由机器的前进速度的Vm 和工作摆的摆动运动组成的。鸭嘴机构的惯性力可以简化为总惯性力和总惯性矩通过质心。外部驱动力矩和阻抗力矩影响了总惯性矩。通常在机构运动方向上开进行惯性力平衡。通过绘制鸭尖点轨迹,可知鸭嘴机构的水平距离约为50cm,运动有效深度约为205mm,相应的传动比可以满足不同间距的株苗移栽运动的要求。
2.3 插植机构的设计
分插机构是插秧机的重要组成部分。横分取秧器有适于拔取苗栽插的秧夹和适于带土苗栽插的切扒式秧爪,两者根据需要可互换使用。秧夹由活动夹片和固定夹片构成,其张开度根据秧苗的粗细和秧苗数量进行调节,切扒式秧爪带有脱秧片,使带土秧苗从秧爪上顺利脱出。洋葱插秧机的设计采用了垂直和分离的插苗方式。插植机构采用椭圆行星轮系的设计理念,椭圆齿轮啮合的最大优点:当两个齿轮啮合运动到任何位置时,它既不会被分离开也不会被切割开,而且传递过程是平稳的。分析椭圆齿轮的角位移、角速度和传动比。从动轮角位移φ2
与主动轮角位移φ2之间的关系。传动比i12为:

椭圆齿轮2 的角速度φ2为:。运动学模型的建立,钵苗取苗机械手位移分析,对机械手进行运动学和动力学分析,首先要求出各点的位移、速度和加速度及和各构件的角位移、角速度和角加速度方程[6]。根据各点的运动方程,可得其运动速度的参数方程和转动的角速度方程,由速度和角速度方程分别对时间t 求导各点加速度和角加速度方程。移栽机取苗机构的整体结构设计,其整体结构的运行,是由马达驱动,太阳轮主动,从而改动两旁两个非圆齿轮转动,由齿轮传动再带动两个非圆齿轮,两端的两个非圆齿轮同轴上分别各有一个凸轮机构,与凸轮连接的是拔叉,而拔叉带动推杆运动,推杆上连接有取苗爪,由于凸轮的间歇性运动特点,从而完成周期性取苗的整个往复过程。进秧机构包括垂直移植机构和横向移植机构。横向送秧机构的送秧方向同机器行进方向垂直,都采用移动秧箱法,因而又称移箱机构。本次设计采用横向送秧机构。移栽箱为定期供给移栽幼苗,由横向进给结构和纵向进给结构组成。
3 结 语
(1)设计了新型旱地洋葱插秧机的整体结构的布局,使用链传动将动力传递给插秧机的移栽机构,完成移栽工作。
(2)设计了插秧机的传动件,插秧机采用链传动,选用了08A-1 型单排链和渗碳钢为材料制作的16 齿和24 齿的链轮进行链传动,对传动链进行了校核,其强度和刚度均满足要求,传动件的设计满足插秧机的需求。
(3)设计了插植机构和鸭嘴机构,先由前方的鸭嘴机构进行破膜刨坑动作,再由后方的插值机构将秧苗插到刨好的坑中,插值机构由行星轮盘组成,可使移栽机构的上下摆动,移栽机构内的秧爪内装有推秧凸轮、推秧拨叉、推秧器等零件,让移栽机构按照固定的轨迹完成取秧移栽的动作,由此完成移栽的动作。拖拉机的前进速度是0.4m/s,鸭嘴机构每秒钟要进行2 次刨坑移栽动作,完成2 次移栽工作。
